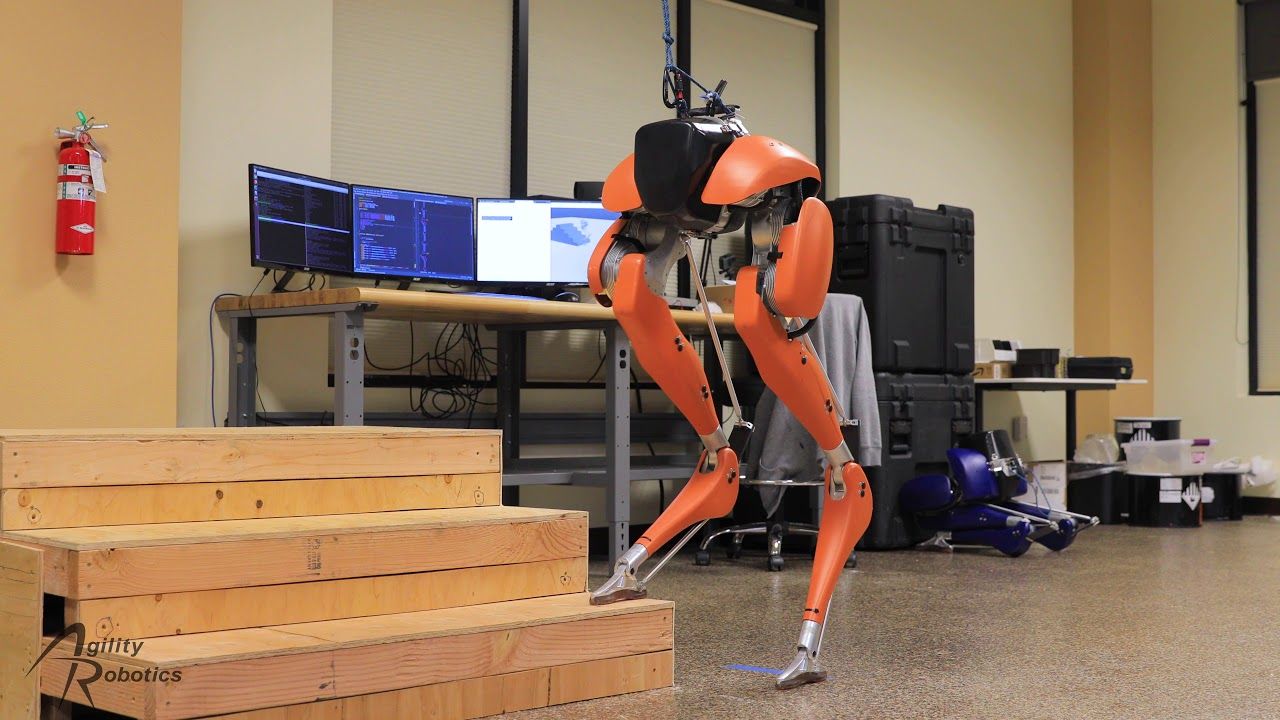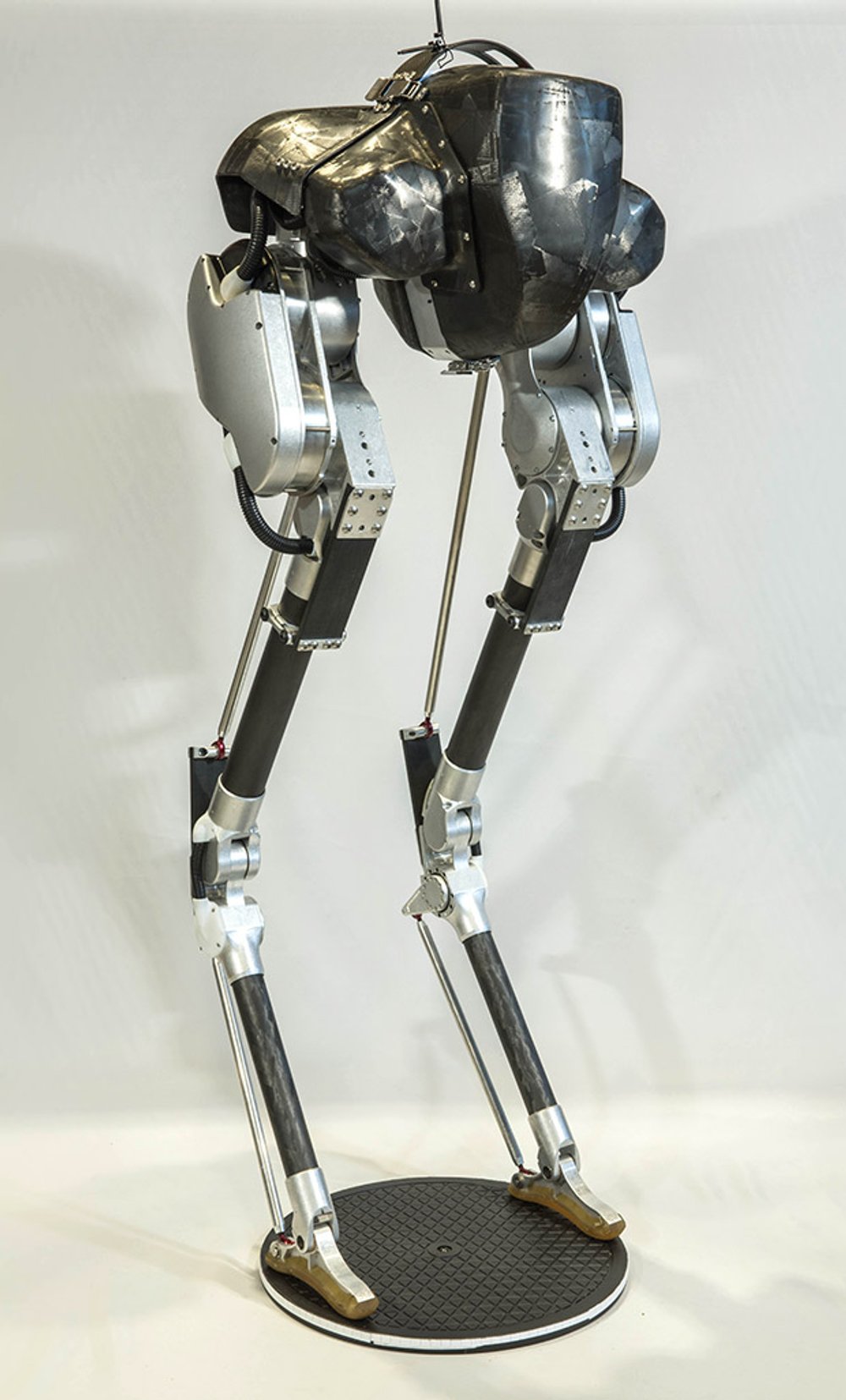
Cassie는 오리건 주립대학교에서 분사한 오리건 소재 기업 Agility Robotics가 개발한 다이나믹 이족보행 로봇입니다. 2016~2017년에 처음 생산된 Cassie는 다리와 몸통만 있는 로봇입니다 — 팔도 상체도 없으며, 강건한 동적 보행과 달리기를 연구하고 시연하기 위해 제작되었습니다. 이 로봇은 Jonathan Hurst의 Dynamic Robotics Laboratory에서 개발된 ATRIAS 연구 로봇의 직계 후손이며, 팔이 장착된 Digit이 이를 대체하기 전까지 Agility의 보행 기술이 처음으로 상용화된 플랫폼입니다.
구매 가능 여부
Cassie는 일반 구매자나 산업 구매자가 아닌 대학 및 연구 기관에 주로 판매되었으며, 현재 Agility의 활성 제품이 더 이상 아닙니다 — 회사의 현재 로봇은 Digit입니다. 공식적인 현재 가격은 없습니다. 자주 인용되는 제3자 추정치에 따르면 Cassie의 가격은 약 $300,000 정도로, 낮은 생산량과 연구용 특성을 반영합니다. 이는 추정치일 뿐 현재 가격이 아닙니다.
현재 Agility 로봇을 원한다면, Cassie가 아닌 Digit을 고려해야 합니다.
전체 사양
| 사양 | 값 |
|---|---|
| 구성 | 이족보행 다리 + 몸통 (팔 없음, 상체 없음) |
| 무게 | ~31 kg |
| 보행/주행 속도 | ~1.39 m/s |
| 작동 시간 | 단일 충전으로 ~5시간 |
| 전원 | 배터리, 무선 작동 |
| 자율성 | 부분 자율; 연구자 제어 |
| 최초 생산 | 2016년 (2016~2017년 도입) |
| 계보 | ATRIAS → Cassie → Digit |
주요 업적
Cassie의 결정적인 공개 순간은 2021년, 오리건 주립대학교 캠퍼스에서 5km 코스를 무선으로 단일 충전으로 완주한 것입니다. 두 번의 낙상 후 재설정을 포함해 53분 조금 넘게 걸렸습니다. 실외 지형에서 달리기 보행을 제어하기 위해 머신러닝을 사용한 최초의 이족보행 로봇이었으며, 계단 오르기와 내리기에도 능숙해졌습니다. 개발은 부분적으로 DARPA의 지원을 받았습니다.
모델 구분
Cassie는 단일 연구용 구성으로 제공되었습니다. Agility의 입장은 명확했습니다: 대부분의 Cassie 고객은 특히 다리 보행 문제에 관심이 있는 보행 제어 연구자였습니다. Agility가 보행 자체가 아닌 응용에 관심이 있는 더 넓은 고객층에 도달하려 했을 때, Digit을 만들었습니다.
구매자 가이드: 알아야 할 사항
Cassie는 보행 연구 전용입니다. 팔이 없고 조작 능력이 없으므로 Cassie는 이족보행, 달리기, 균형 및 강화학습 제어기 연구를 위한 플랫폼입니다 — 그 외에는 없습니다.
사실상 레거시 하드웨어입니다. Agility의 로드맵(Cassie → Digit v1 → v2 → v3 → v4)은 이미 넘어갔습니다. 새 구매자는 Digit을 평가해야 합니다. Cassie는 기존 연구 라인을 계속하거나 순수 보행 테스트베드를 찾는 연구소에 가장 적합합니다.
강력한 학문적 배경을 가지고 있습니다. Cassie는 이족보행 연구 문헌에서 잘 문서화된 플랫폼으로 남아 있으며, 이것이 지속적인 연구 가치의 일부입니다.
Cassie vs 유사 로봇
- Cassie vs Agility Digit: Digit은 직접적인 후속 제품으로, 센서가 풍부한 몸통, 머리, 그리고 균형, 낙상 회복 및 조작을 위한 두 개의 팔(원래 각각 약 4 자유도)이 추가되었습니다. Digit은 상업용 물류 휴머노이드이고, Cassie는 보행 전용 연구 로봇입니다.
- Cassie vs Unitree G1: 둘 다 연구 플랫폼으로 사용되었지만, G1은 팔, 손 및 소프트웨어 SDK를 갖춘 완전한 휴머노이드인 반면, Cassie는 다리 전용이며 보행에 중점을 둡니다.
- Cassie vs Boston Dynamics Atlas: 둘 다 동적 이족보행 능력을 발전시켰지만, Atlas는 전신 민첩성과 (현재는) 산업 작업을 위해 제작된 완전한 휴머노이드인 반면, Cassie는 문제를 의도적으로 다리로만 축소했습니다.
출처: Agility Robotics