Apptronik Apollo는 키 173cm(5피트 8인치), 몸무게 73kg의 전신 크기 범용 휴머노이드 로봇으로, 산업 물류 및 제조 작업을 위해 처음부터 설계되었습니다. 최대 25kg(55파운드)의 탑재량을 운반할 수 있으며, 핫스왑 가능한 배터리로 4시간 작동하고, 전신 기민함을 위해 71자유도를 갖추고 있습니다. Apollo는 현재 일반 구매가 불가능하지만, Mercedes-Benz 공장, GXO Logistics 창고, Jabil 제조 시설에서 시범 프로그램으로 활발히 배치되고 있습니다. Google, Mercedes-Benz, ARK Invest로부터 55억 달러 평가액에 9억 3500만 달러 이상의 시리즈 A 투자를 받은 Apptronik은 2026년 상업 규모 생산을 목표로 하며, 장기 가격 목표는 5만 달러 미만입니다.
가격 및 구매 가능 여부
Apollo는 2026년 4월 기준 일반 구매가 불가능합니다. 선정된 기업 고객을 대상으로 활발한 시범 배치가 진행 중입니다. Apptronik은 소매 가격을 공개하지 않았습니다.
| 이정표 | 상태 | 일정 |
|---|---|---|
| Apollo 공개 | 완료 | 2023년 8월 |
| Mercedes-Benz 시범 (헝가리, 베를린-마리엔펠데) | 진행 중 | 2024년 3월–현재 |
| GXO Logistics 창고 시범 (미국) | 진행 중 | 2024년–현재 |
| Jabil 제조 파트너십 | 진행 중 | 2025년 2월–현재 |
| 시리즈 A 총 투자금 | 9억 3500만 달러 (55억 달러 평가액) | 2026년 2월 |
| Google DeepMind AI 파트너십 (Gemini Robotics) | 진행 중 | 2025년–현재 |
| 상업 규모 생산 목표 | 계획 | 2026년 |
| 장기 목표 단가 | 5만 달러 미만 | 대량 생산 시 |
| 현재 추정 제조 비용 | 대당 15만 달러 (업계 추정, 2023년 약 25만 달러에서 하락) | 2026년 초 |
| 생산 능력 | 현재까지 1,000대 미만 | Jabil 파트너십을 통해 확장 중 |
구매 가능 여부에 대한 중요 맥락: Apollo는 온라인으로 주문할 수 있는 소매 제품이 아니라 직접 파트너십을 통해 배치되는 기업용 제품입니다. Apollo 시범 운영에 관심이 있는 제조업체, 물류 제공업체 또는 기업 구매자는 Apptronik 웹사이트를 통해 직접 문의하시기 바랍니다. 가까운 시일 내에 소비자 판매 계획은 없습니다.
전체 사양
섀시 및 구조
| 사양 | 값 |
|---|---|
| 키 | 173 cm |
| 무게 | ~73 kg |
| 총 자유도 | 71 |
| 프레임 | 산업용 등급 소재, 모듈식 설계 |
| 폼 팩터 | 인간 크기 – 표준 출입문 통과, 인간 작업 공간 이동 가능 |
| 모듈성 | 상체를 다리, 바퀴 달린 베이스 또는 고정 받침대에 장착 가능 |
| LED | 머리, 입, 가슴 – 작동 상태 표시 |
| 설계 철학 | "친근한 상호작용, 대량 생산성, 높은 탑재량, 안전" |
성능
| 사양 | 값 |
|---|---|
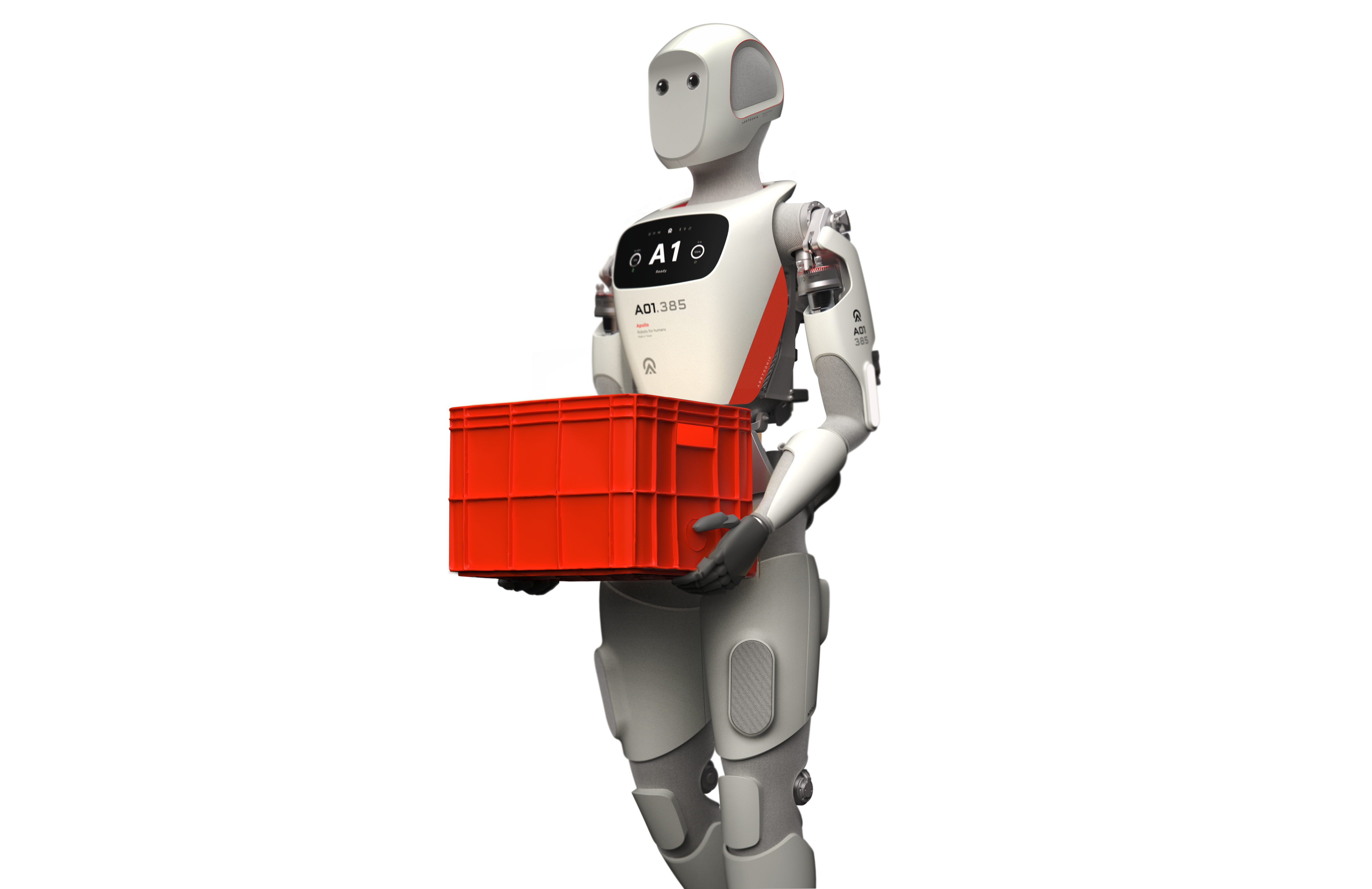
| 탑재량 | 25 kg |
| 보행 속도 | 보통 (정확한 속도는 공식 발표되지 않음 – 시연 영상 기준 약 1.5 m/s로 추정) |
| 이동 모드 | 이족 보행 다리, 옵션 바퀴 베이스 또는 고정 마운트 |
| 조작 | 파지 및 물체 조작을 위한 힘 제어 기능을 갖춘 손 |
| 시연된 작업 | 토트 처리, 부품 운반, 조립 키트 전달, 부품 검사, 분류, 포장 |
배터리 및 전원
| 사양 | 값 |
|---|---|
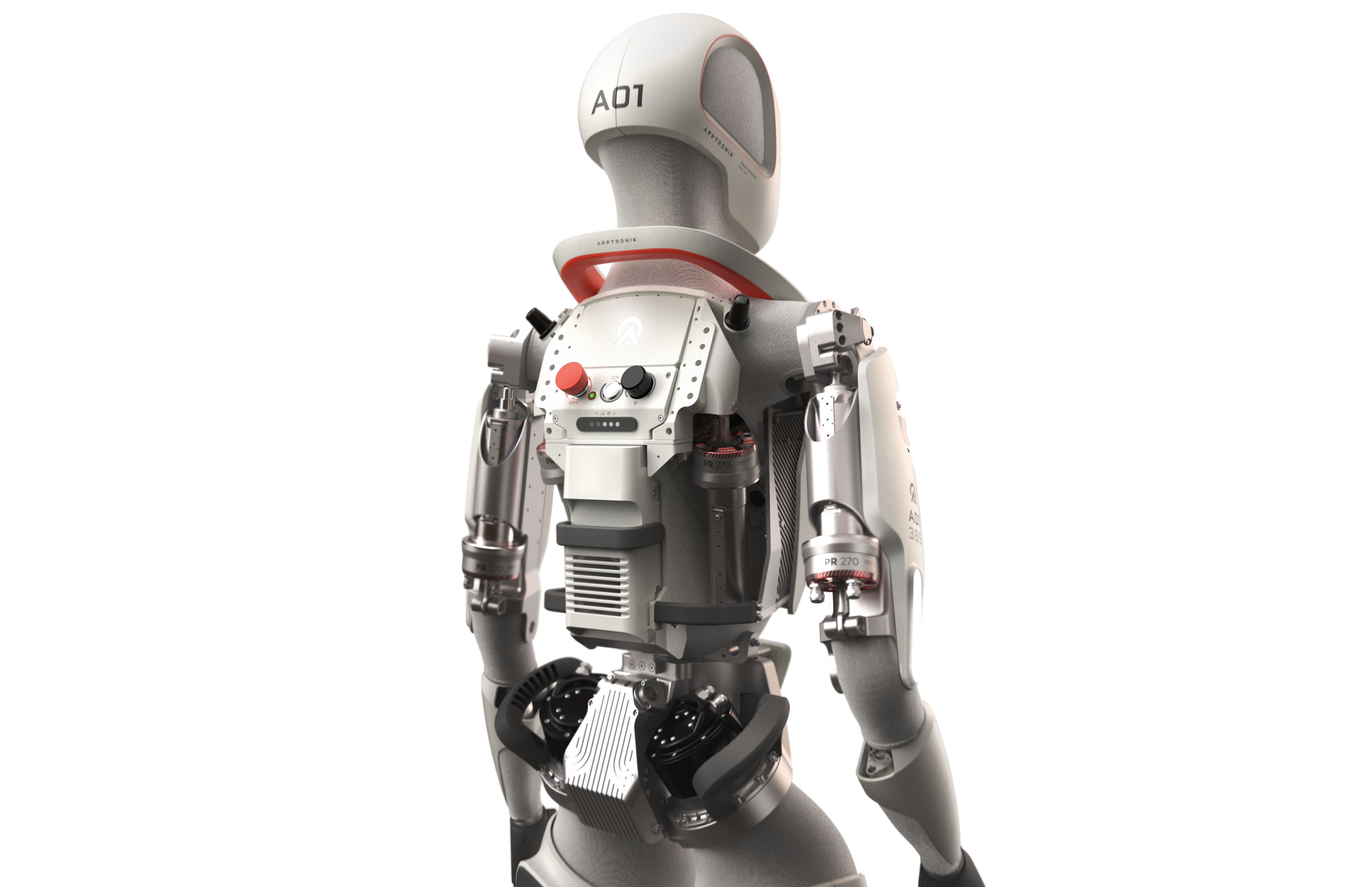
| 배터리 유형 | 핫스왑 가능 리튬 팩 |
| 배터리당 작동 시간 | 약 4시간 |
| 배터리 교체 시간 | 5분 미만 |
| 일일 작동 용량 | 최대 약 22시간 (배터리 교체 포함) |
| 유선 작동 | 지원 – 무제한 연속 작동을 위해 전원 연결 가능 |
| 충전 | 교대 간 표준 플러그인 충전 |
센서 및 인식
| 기능 | 값 |
|---|---|
| 시각 시스템 | 다중 카메라 (세부 사항 완전 공개되지 않음) |
| 힘/토크 감지 | 모든 관절 – 인간 주변에서 안전한 힘 제어 동작 가능 |
| 발 센서 | 인간에서 영감을 받은 형상의 힘/토크 센서로 동적 균형 지원 |
| 안전 구역 | 구성 가능한 외부 감지 영역 – 인간이 경계를 넘으면 로봇 정지 |
| 비상 정지 | 있음 |
컴퓨팅 및 AI
| 기능 | 값 |
|---|---|
| 핵심 컴퓨팅 모듈 | NVIDIA Jetson AGX Orin + Jetson Orin NX |
| AI 플랫폼 | NVIDIA GR00T (Project GR00T foundational model) |
| AI 모델 | Google DeepMind Gemini Robotics 1.5 + Gemini Robotics Extended Reasoning |
| 학습 접근법 | 시연을 통한 모방 학습 + 자연어 작업 명령 |
| 플릿 학습 | 배치된 유닛에서 수집된 데이터가 중앙 AI 훈련에 피드백 |
| 시연된 AI 능력 | 익숙하지 않은 물체 처리, 음성 명령 따르기, 변화하는 조건에 적응, 다단계 작업 계획 |
| 소프트웨어 | 창고 및 제조 통합을 위한 포인트 앤 클릭 제어 스위트 |
안전 아키텍처
| 기능 | 값 |
|---|---|
| 제어 방식 | 힘 제어 (위치 제어 아님) – 로봇이 접촉을 감지하고 적응 |
| 충돌 대응 | 관절 순응성이 충격력을 줄임 – 협동 로봇 대 산업용 로봇 안전과 유사 |
| 안전 구역 | 외부 센서 및 "라이트 커튼" 경계 – 인간이 구역에 들어오면 로봇 정지 |
| 미래 목표 | 완전한 "협업 안전" – 장벽 없이 인간과 함께 감속, 정지, 기동 |
| 설계 속도 | 제한된 최고 속도 – 인간이 쉽게 피할 수 있음 |
| 무게 | 73kg – 비상 시 사람이 제어 가능 |
Apollo의 차별점
연구용이 아닌 작업용으로 설계
현재 시장에 나와 있는 대부분의 휴머노이드 로봇은 연구용 플랫폼(Unitree G1, H1)이거나 개발 프로그램(Tesla Optimus, Figure)입니다. Apollo는 처음부터 물류 및 제조를 위한 상업용 작업용으로 설계되었습니다. 모든 설계 결정(핫스왑 배터리, 모듈식 마운팅, 힘 제어 안전, 25kg 탑재량)은 실험실 시연이 아닌 실제 운영 요구 사항을 반영합니다.
NASA 유산
Apptronik의 창립 팀은 텍사스 대학교 오스틴에서 NASA의 Valkyrie (R5) 휴머노이드 로봇을 개발했습니다. 극한 환경을 위한 견고하고 신뢰할 수 있는 시스템을 구축한 이러한 배경은 Apollo가 화려한 운동 능력보다 내구성, 안전성, 실용적 기능성을 강조하게 된 직접적인 계기입니다.
힘 제어 아키텍처
대부분의 휴머노이드 로봇이 위치 제어(특정 지점으로 정확히 이동)를 사용하는 반면, Apollo는 힘 제어를 사용합니다. 실시간으로 접촉력을 감지하고 반응합니다. 이로 인해 충돌 위험이 줄어들고, 안전한 인간 협업이 가능하며, 예측 불가능한 환경에 적응할 수 있습니다. 이는 협동 산업용 로봇(cobot)의 동일한 원리를 휴머노이드 폼 팩터에 적용한 것입니다.
핫스왑 가능 배터리
각 배터리 팩은 4시간 작동을 제공하며 로봇을 종료하지 않고 5분 이내에 교체할 수 있습니다. 배터리 로테이션을 통해 Apollo는 하루 최대 22시간 작동할 수 있습니다. 이는 플러그인 충전이 필요하고 충전 중에는 유휴 상태가 되는 로봇에 비해 확실한 운영상 이점입니다.
모듈식 베이스
Apollo의 상체는 이족 보행 다리, 바퀴 달린 플랫폼 또는 고정 받침대에 장착할 수 있습니다. 즉, 동일한 로봇이 창고를 걸어 다니고, 공장 바닥을 굴러 다니거나, 작업대에 앉을 수 있어 배포 요구 사항에 맞게 적응합니다.
71자유도
Apollo는 대부분의 경쟁사보다 DOF가 훨씬 많습니다. Tesla Optimus는 약 28개의 몸체 DOF(손 제외), Figure 02는 약 41개, Unitree H2는 31개입니다. Apollo의 71 DOF는 더 복잡한 전신 움직임(팔-몸통-다리의 협력 동작으로 뻗기, 구부리기, 회전, 조작)을 가능하게 합니다.
Apollo의 대상
제조 및 자동차
Mercedes-Benz는 베를린-마리엔펠데 시설과 헝가리 공장에서 Apollo를 테스트하여 조립 키트 전달, 작업장 간 부품 운반, 생산 라인 부품 검사 등을 수행하고 있습니다. 글로벌 전자 제조업체인 Jabil은 Apollo 생산 확장을 돕는 제조 파트너이자 자체 공장에 Apollo를 통합하는 배포 고객입니다.
창고 및 물류
세계 최대 순수 계약 물류 제공업체인 GXO Logistics는 미국 물류 센터에서 Apollo와 다단계 시범 운영을 진행 중입니다. 초점은 케이스 피킹(창고 운영에서 표준 컨테이너(케이스 및 토트) 이동)입니다. 이는 Agility Robotics가 Digit으로 목표로 하는 것과 동일한 사용 사례입니다.
미래 응용 분야
Apptronik은 건설, 석유 및 가스, 전자 제품 생산, 소매, 가정 배송, 노인 돌봄으로의 장기적 확장을 구상하고 있습니다. 그러나 단기 배포는 비즈니스 사례가 가장 명확한 제조 및 물류에 집중되어 있습니다.
구매자 가이드: 기업 구매자가 알아야 할 사항
Apollo를 즉시 구매할 수 없습니다
Apollo는 소매 채널이 아닌 직접 기업 파트너십을 통해 배치됩니다. 관심이 있으시면 Apptronik에 직접 문의하십시오. 즉시 구매가 아닌 파일럿 프로그램 구조(평가 단계, 작업 식별, 단계적 배포)를 예상하십시오.
현재 가격대는 기업용 수준
현재 제조 비용은 대략 대당 15만 달러(2023년 약 25만 달러에서 하락)로 추정됩니다. Apptronik의 장기 목표는 대량 생산 시 5만 달러 미만이지만, 이는 회사가 아직 달성하지 못한 생산량을 필요로 합니다. 초기 고객은 기업용 로봇 가격 수준으로 예산을 책정해야 합니다.
생산은 확장 중, 완료되지 않음
현재까지 1,000대 미만의 Apollo가 생산되었습니다. Jabil 제조 파트너십은 2026년 이후 이를 크게 늘리기 위한 것이지만, Apollo는 아직 대량 생산 규모에 도달하지 않았습니다. 리드 타임과 가용성은 배포 규모와 시기에 따라 달라집니다.
AI가 빠르게 발전 중
Google DeepMind 파트너십(Gemini Robotics)과 NVIDIA GR00T 통합으로 Apollo의 AI 기능이 지속적으로 개선되고 있습니다. 최근 시연에서는 로봇이 익숙하지 않은 물체를 처리하고, 음성 명령을 따르며, 변화하는 조건에 적응하는 모습을 보여주었지만, 이는 통제된 데모 환경일 뿐 완전 자율 생산 배포는 아닙니다.
안전은 핵심 설계 원칙
Apollo의 힘 제어 아키텍처, 구성 가능한 안전 구역 및 비상 정지 시스템은 인간-로봇 협업을 위해 설계되었습니다. 그러나 현재 배포에서는 라이트 커튼 경계가 있는 지정된 구역을 사용합니다. 인간과 Apollo는 분리된 영역에서 작업합니다. 완전한 장벽 없는 협업 작업은 현재 기능이 아닌 미래 목표입니다.
Apptronik Apollo vs 유사 로봇
- Apollo vs Tesla Optimus: Apollo는 상업 배포에서 더 앞서 있습니다. Mercedes-Benz, GXO, Jabil과의 활발한 시범 운영에 비해 Optimus는 테슬라 공장 내부 배포만 있습니다. Apollo는 71 DOF(Optimus의 약 28개 몸체+손 대비), 더 높은 탑재량(25kg vs 20kg), 핫스왑 배터리를 갖추고 있습니다. Optimus는 테슬라의 대규모 제조 규모와 훨씬 낮은 목표 가격(2만~3만 달러 대 Apollo의 5만 달러 미만)을 가지고 있습니다. 둘 다 일반 구매는 불가능합니다.
- Apollo vs Figure 02/03: Figure는 더 많은 자본(390억 달러 평가액에 26억 달러 이상)을 조달했으며 Helix 플랫폼을 통해 강력한 AI 추론을 입증했습니다. 둘 다 유사한 산업 사용 사례를 목표로 합니다. Apollo는 더 높은 탑재량(25kg vs 20kg)과 더 많은 DOF(71 vs 약 41)를 가지고 있습니다. Figure는 BMW를 공장 파트너로 두고 있습니다. 둘 다 소매 구매는 불가능합니다.
- Apollo vs Agility Digit: Digit는 Amazon 및 GXO 창고 프로그램을 통해 상업 물류 분야에서 가장 많이 배치된 휴머노이드입니다. Digit는 8시간 배터리로 케이스 처리를 위한 특수 설계를 갖추고 있습니다. Apollo는 더 범용적이며 더 높은 탑재량과 다양한 장착 옵션을 제공합니다. Digit의 비용은 약 25만 달러입니다. Apollo의 현재 비용은 약 15만 달러로 추정됩니다.
- Apollo vs Unitree H2: H2는 현재 29,900달러에 구매 가능하며, Apollo의 추정 가격 15만 달러보다 훨씬 저렴합니다. H2는 31 DOF(Apollo 71 DOF 대비), 낮은 탑재량(7kg vs 25kg)을 가지며 교육 및 상업 서비스를 포함한 더 넓은 시장을 목표로 합니다. Apollo는 특수 목적 산업 플랫폼인 반면, H2는 더 넓은 구매자 기반이 접근할 수 있는 범용 휴머노이드입니다.
- Apollo vs Unitree G1: G1(13,500~73,900달러)은 지금 구매하고 배포할 수 있는 소형 연구용 휴머노이드입니다. Apollo는 아직 구매할 수 없는 기업용 산업 플랫폼입니다. 완전히 다른 범주입니다. G1은 연구자용, Apollo는 포춘 500대 공장용입니다.
- Apollo vs Boston Dynamics Atlas: Atlas는 지금까지 만들어진 가장 기계적으로 진보된 휴머노이드이지만, 추정 가격 32만~42만 달러로 제한된 기업 시범 프로그램에 있습니다. Apollo는 더 접근하기 쉬운 가격 궤적을 제공하며 상업 파트너십 배포에서 더 진전되었습니다.
결론
Apptronik Apollo는 2026년 기준 세계에서 가장 상업적으로 성숙한 휴머노이드 로봇 중 하나입니다. Mercedes-Benz, GXO, Jabil에서의 실제 배포(9억 3500만 달러 투자 및 Google DeepMind, NVIDIA와의 파트너십을 바탕으로)는 대부분의 경쟁사가 갖추지 못한 신뢰성을 제공합니다. 71 DOF, 25kg 탑재량, 핫스왑 배터리 시스템, 힘 제어 안전 아키텍처는 모두 연구 유연성이나 소비자 매력보다 실용적인 산업 요구 사항을 중심으로 설계되었습니다.
그러나 Apollo는 오늘 구매할 수 있는 제품이 아닙니다. Apptronik과의 직접 파트너십을 통해 액세스할 수 있는 엔터프라이즈 배포입니다. 현재 비용은 대당 15만 달러로 추정되며, 생산은 아직 확장 중이고 AI 기능은 시연에서 인상적이지만 생산 환경에서 완전 자율적이지는 않습니다.
공장이나 창고 파일럿을 위해 휴머노이드 로봇을 평가하는 기업 구매자: Apollo는 후보 목록에 포함되어야 합니다. 파일럿 프로그램을 알아보려면 Apptronik에 직접 문의하십시오.
지금 실제로 구매하고 배포할 수 있는 휴머노이드 로봇이 필요한 연구자, 교육자, 개발자: 접근 가능한 가격대로 실제 성능을 제공하고 현재 출시 중인 Unitree의 라인업(G1, H2, R1)을 살펴보십시오.