DLR 저스틴 — 스펙 & 역사 — Specs, Price & Where to Buy (2026)
저스틴(또는 "Rollin' Justin" 및 "Agile Justin")은 독일 항공우주센터(DLR)가 개발한 손재주가 뛰어난 두 팔 휴머노이드 로봇입니다. 바퀴 달린 베이스에 상체가 장착되어 있으며, 던져진 공을 잡는 등의 고급 조작이 가능합니다.
💰가격
$400,000
📅최초 제작
2008
🌍출신
DE
📏높이
190 cm
⚖️무게
150 kg
🦾자유도
41
🏃최고 속도
3.6 km/h
📦적재량
15 kg
🔋배터리
Not applicable
🛒가용성
구매 가능
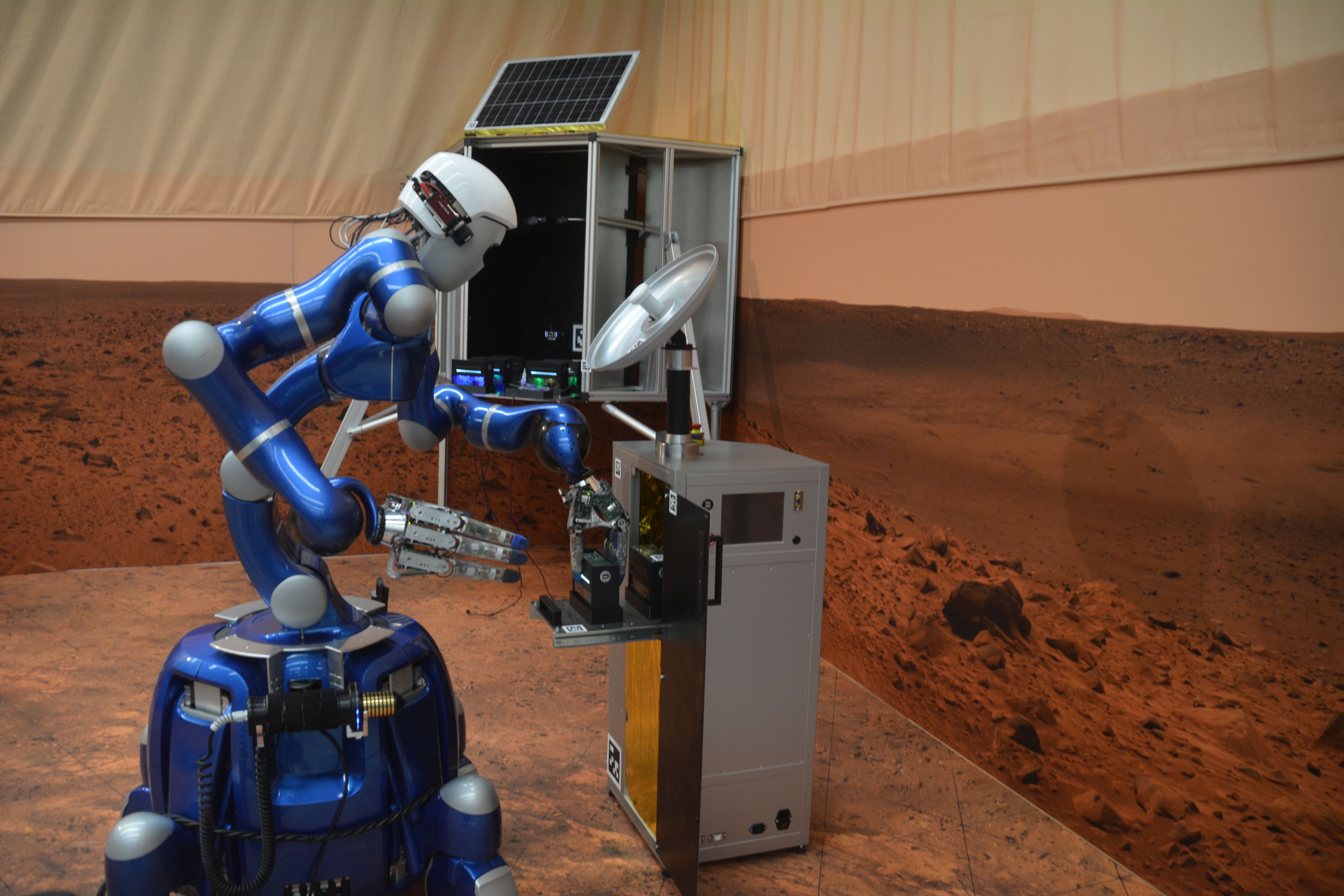
저스틴(또는 "Rollin' Justin" 및 "Agile Justin"으로도 알려짐)은 독일 항공우주센터(DLR)의 로보틱스 및 메카트로닉스 센터에서 개발한, 손재주가 뛰어난 두 팔 휴머노이드 로봇입니다. 저스틴은 이족보행 로봇이 아닙니다. 바퀴 달린 확장 가능한 베이스 위에 장착된 고성능 휴머노이드 상체(몸통, 머리, 정교한 손을 가진 두 팔)로 구성됩니다. 저스틴은 고급 손재주 조작 연구를 위해 제작되었으며, 특히 뛰어난 능력을 갖추고 있습니다. 예를 들어, 던져진 공을 관찰하고 궤적을 순식간에 예측하여 잡을 수 있습니다.
구매 가능 여부
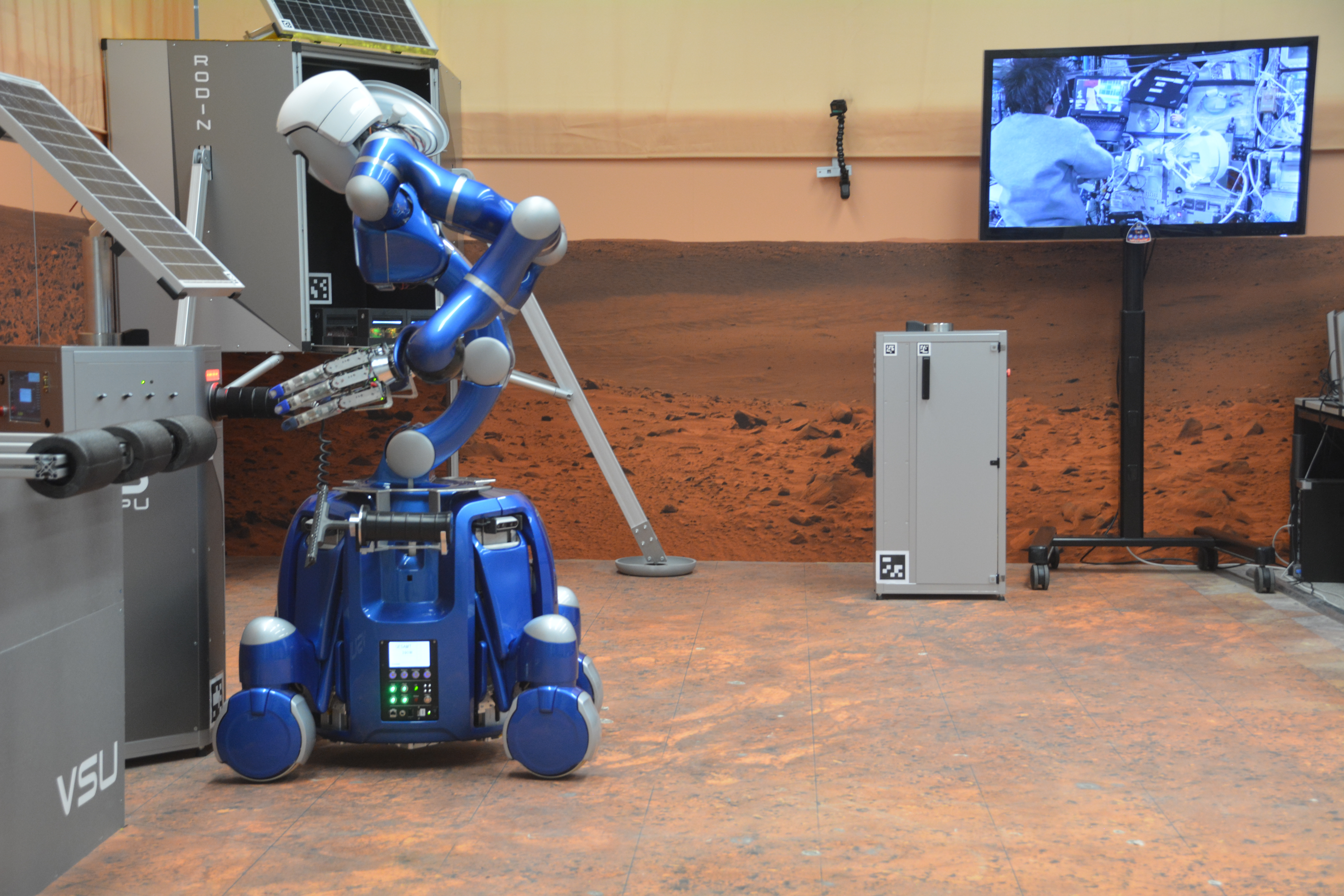
저스틴은 DLR이 내부적으로 개발 및 사용하는 연구용 로봇입니다. 상용 제품이 아니므로 가격이나 구매 경로가 없습니다. DLR은 저스틴을 통해 손재주 조작, 양팔 협조, 원격 로봇 공학(특히 우주 원격 로봇 공학, 예를 들어 국제우주정거장의 우주비행사가 지상의 저스틴과 같은 로봇을 원격 제어하는 연구)의 한계를 넓히고 있습니다.
전체 사양
항목
세부사항
개발자
독일 항공우주센터(DLR), 로보틱스 및 메카트로닉스 센터
유형
바퀴 달린 확장 가능한 이동 베이스 위의 손재주 좋은 두 팔 휴머노이드 상체 ("Rollin' Justin")
손
매우 뛰어난 손재주를 가진 손 — DLR의 TORO보다 발전된, 다양한 물체와 상호작용 가능
주요 기술
던져진 공을 실시간으로 관찰하고 궤적 예측하여 잡기
연구 초점
손재주 및 양손 조작; 원격 로봇 공학 (우주 원격 로봇 공학 포함)
기술 기반
DLR의 경량 토크 제어 로봇 전문 기술 (KUKA-DLR 경량 로봇 팔과 동일한 계보)
중요성
저스틴은 지금까지 제작된 연구용 휴머노이드 중 가장 손재주가 뛰어난 로봇 중 하나로, 경량 토크 제어 및 힘 감응 로봇 분야에서 DLR의 세계 최고 수준의 업적을 보여줍니다. 양팔 협조와 고급 손 기술은 조작 연구의 벤치마크 플랫폼이 되었으며, ISS-지상 제어를 포함한 원격 로봇 공학 실험에 사용되어 DLR의 우주 로봇 임무와 직접적으로 연결됩니다. 저스틴은 이동성보다 손재주를 설계 우선순위로 삼았을 때 무엇이 가능한지 보여줍니다.
관련 로봇과의 비교
저스틴 vs DLR TORO: 같은 기관 — TORO는 DLR의 이족보행 휴머노이드, 저스틴은 더 뛰어난 손을 가진 바퀴 기반 손재주 조작 휴머노이드입니다.
저스틴 vs Astribot S1: 둘 다 이족보행보다 손재주 조작을 우선시합니다.
저스틴 vs NASA Robonaut 2: 둘 다 우주 관련 맥락을 포함한 숙련된 조작을 위해 설계된 손재주가 뛰어난 상체 휴머노이드입니다.
DLR Justin is not sold commercially and has no official price. It is a bespoke research platform built in-house by the German Aerospace Center. Any attempt to purchase would require a direct collaboration agreement with DLR.
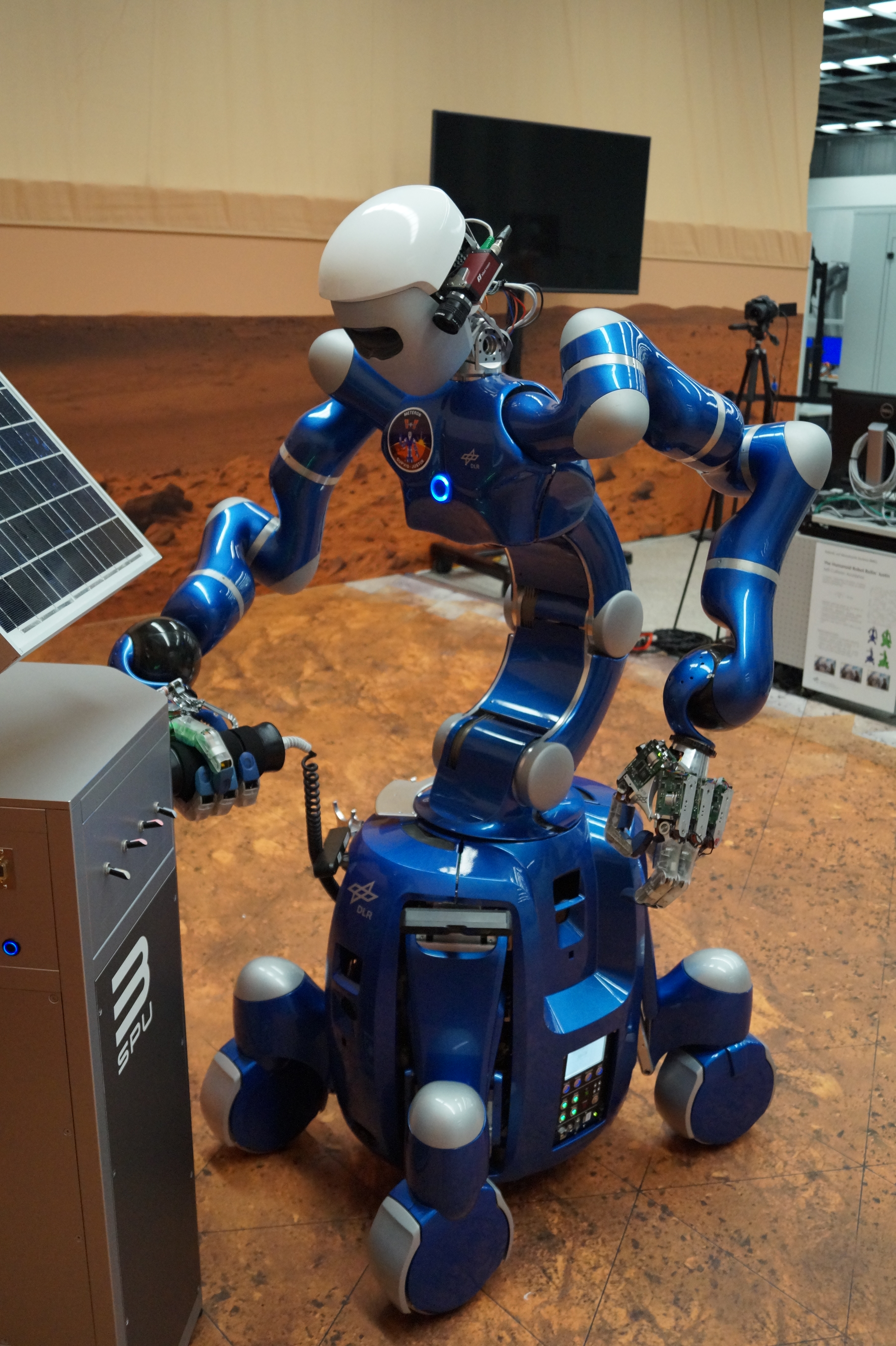
Justin excels at dexterous bimanual manipulation, including catching thrown objects, precise assembly tasks, and teleoperation with haptic feedback. Its 41 torque-controlled joints and four-fingered hands allow it to handle fragile objects gently or apply precise forces, but it cannot walk—only roll on its omnidirectional base.
No. DLR Justin is strictly a research platform and has never been offered for sale. Researchers outside DLR can sometimes access the technology through joint projects or by replicating parts of its design using published papers, but there is no commercial production.
The PR2 is also a research platform but it is a mobile base with two arms and no humanoid shape; it costs about $400,000 (originally). Justin is taller, has a humanoid upper body, more advanced hands with tactile sensing, and torque control in every joint. However, PR2 has a strong open-source software ecosystem and was sold to universities, making it easier to acquire and modify.
Justin stands 190 cm tall, weighs 150 kg, and has 41 degrees of freedom: 7 per arm, 12 per hand (four-fingered), and a 3-DOF movable torso. It moves at up to 3.6 km/h on its wheeled base, lifts approximately 15 kg per arm, and is powered via an external tether.
The DLR Justin was developed by the Institute of Robotics and Mechatronics at the German Aerospace Center (DLR) in Oberpfaffenhofen, Germany. DLR is a government-funded research organization known for space, aeronautics, and robotics research.
Justin does not have a battery. It relies on an external power supply via a tether, so runtime is unlimited as long as it is connected. This was an intentional design choice to focus on manipulation research without weight or endurance constraints.
Justin is used exclusively in academic and government research settings, particularly for advanced manipulation studies, space robotics programmes, and human-robot interaction labs. It has not been deployed in any commercial industry due to its laboratory nature.
No, Justin does not have legs. It is a wheeled humanoid that stands on an omnidirectional base, capable of moving sideways and turning. Its mobility is limited to smooth, flat indoor floors.
Justin is equipped with stereo cameras, laser scanners, torque sensors in every joint, six-axis force/torque sensors at each wrist, and tactile sensors on the fingertips. These sensors provide rich feedback for force control and environmental perception.