혼다 E2-DR — 사양 및 역사 — Specs, Price & Where to Buy (2026)
혼다 E2-DR(Experimental robot 2 — Disaster Response)은 재난 대응용 휴머노이드 로봇 프로토타입으로, 혼다가 IROS 2017에서 공개했습니다.
💰가격
Undisclosed
📅최초 제작
2017
🌍출신
JP
📏높이
168 cm
⚖️무게
85 kg
🦾자유도
33
🏃최고 속도
2.7 km/h
📦적재량
Not specified
🔋배터리
2 hours
🛒가용성
구매 불가
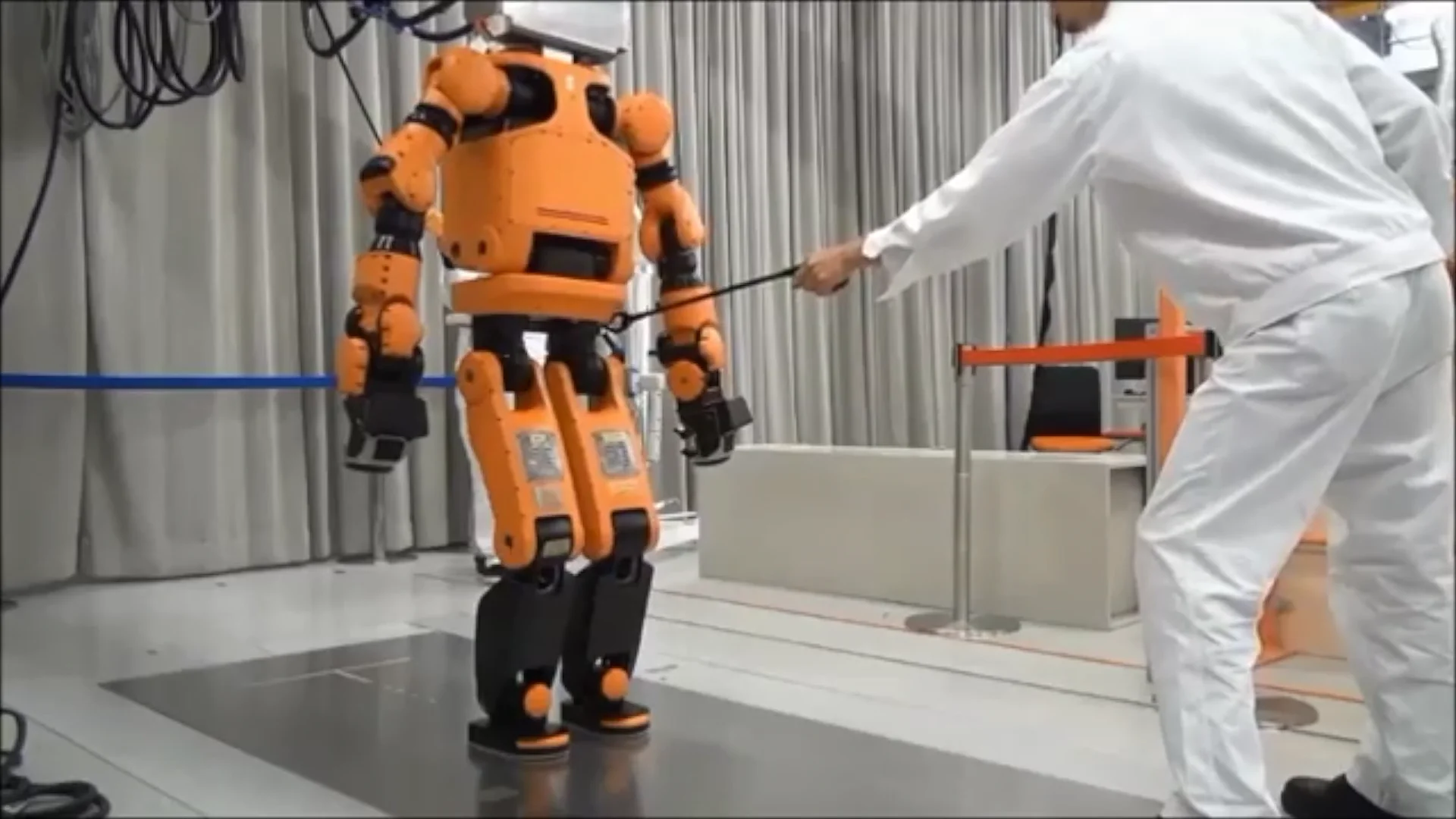
혼다 E2-DR(Experimental robot 2 — Disaster Response)은 재난 대응용 휴머노이드 로봇 프로토타입으로, 혼다가 IROS 2017 로보틱스 컨퍼런스에서 공개했습니다. 이 프로젝트는 2015년 연구 논문에서 처음 소개되었습니다. ASIMO의 친근하고 시연 중심의 디자인과 달리, 밝은 주황색 E2-DR은 위험한 환경에서 인간 구조자를 대신하기 위해 설계되었습니다. 손상된 산업 시설이나 원전 사고 현장처럼 사람이 접근하기 어려운 조건에서 점검, 유지보수 및 지원 작업을 수행합니다.
가용성
E2-DR은 실험용 연구 프로토타입으로, 상용화되지 않았습니다. 혼다는 이 프로토타입이 유용하려면 상당한 추가 개발이 필요하다고 밝혔으며, 출시일이나 제품을 발표하지 않았습니다. 가격이나 구매 경로는 없습니다.
전체 사양
사양
값
공개 시기
IROS 2017 (프로젝트는 2015년 논문에서 먼저 소개됨)
신장
약 1.68m
중량
약 85kg
자유도
총 33자유도 (팔당 8, 다리당 6, 몸통 2, 손과 머리 각각 1)
몸체 두께
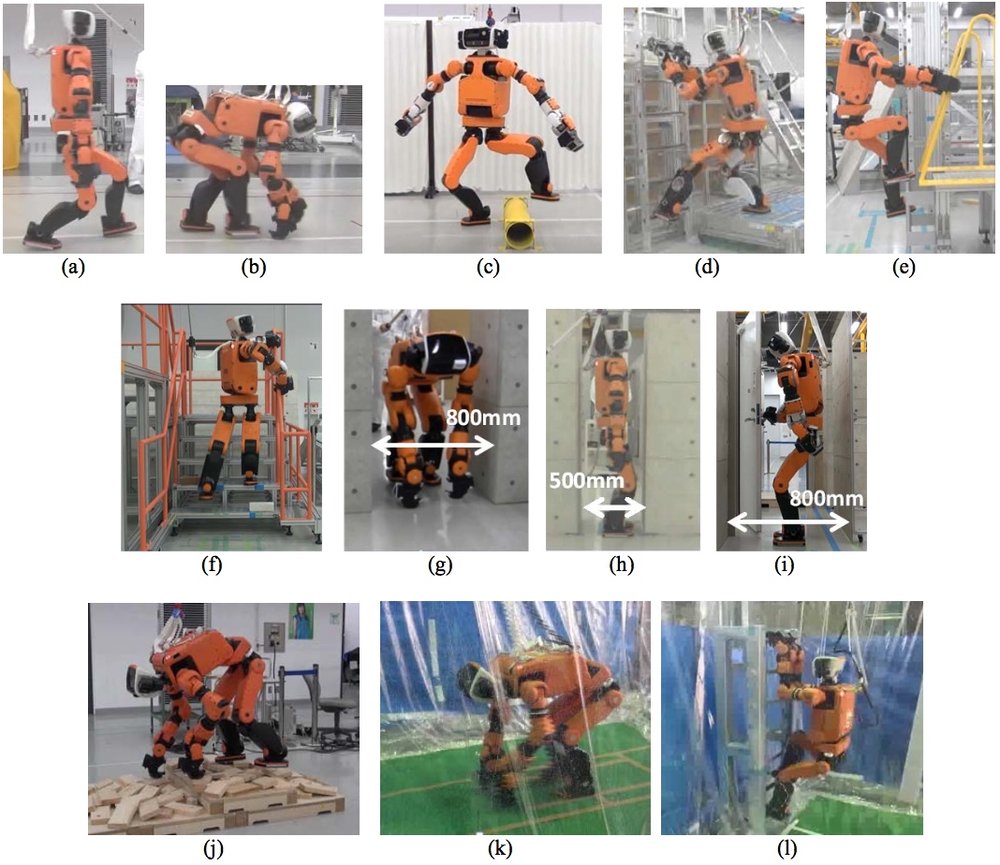
약 25cm — 약 30cm 간격을 통과 가능
배터리
약 1,000Wh 리튬이온; 약 90분 작동
보행 속도
약 2km/h
배선
광섬유 케이블(약 0.5mm)로 기존의 두꺼운 케이블 대체, 크기와 무게 절감
환경 내성
약 20분간 비를 견딤; 약 -10°C에서 40°C까지 작동; 미로형 관절 구조로 먼지와 물 저항
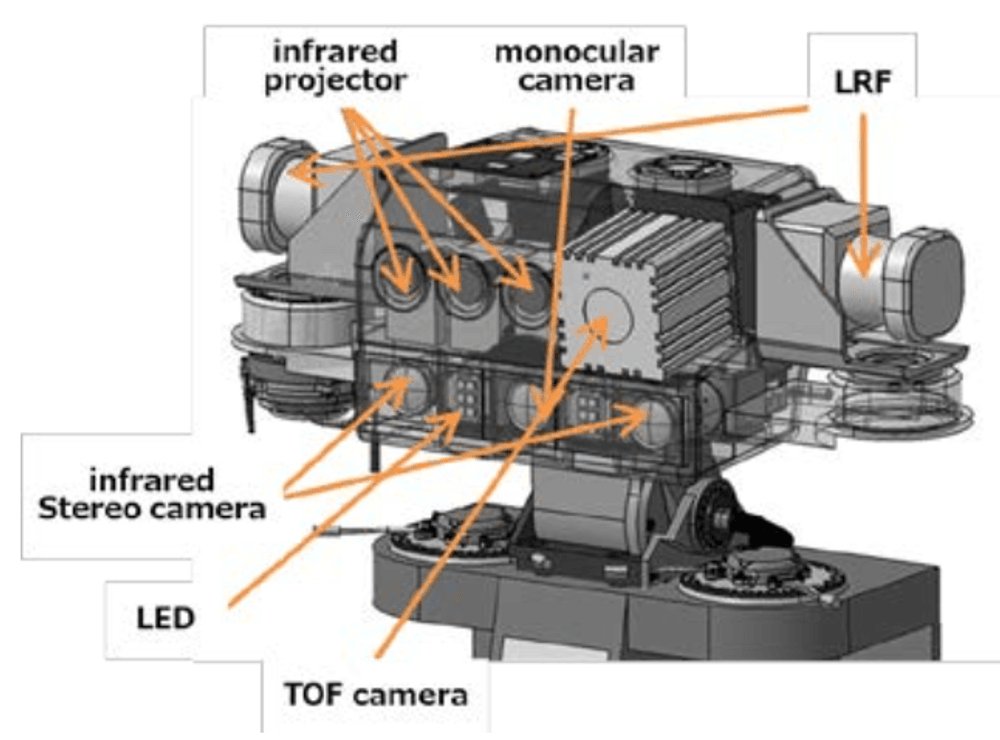
감지
머리: 레이저 거리 측정기, 단안 및 스테레오 카메라, 적외선 프로젝터; 각 손에 카메라와 3D 카메라
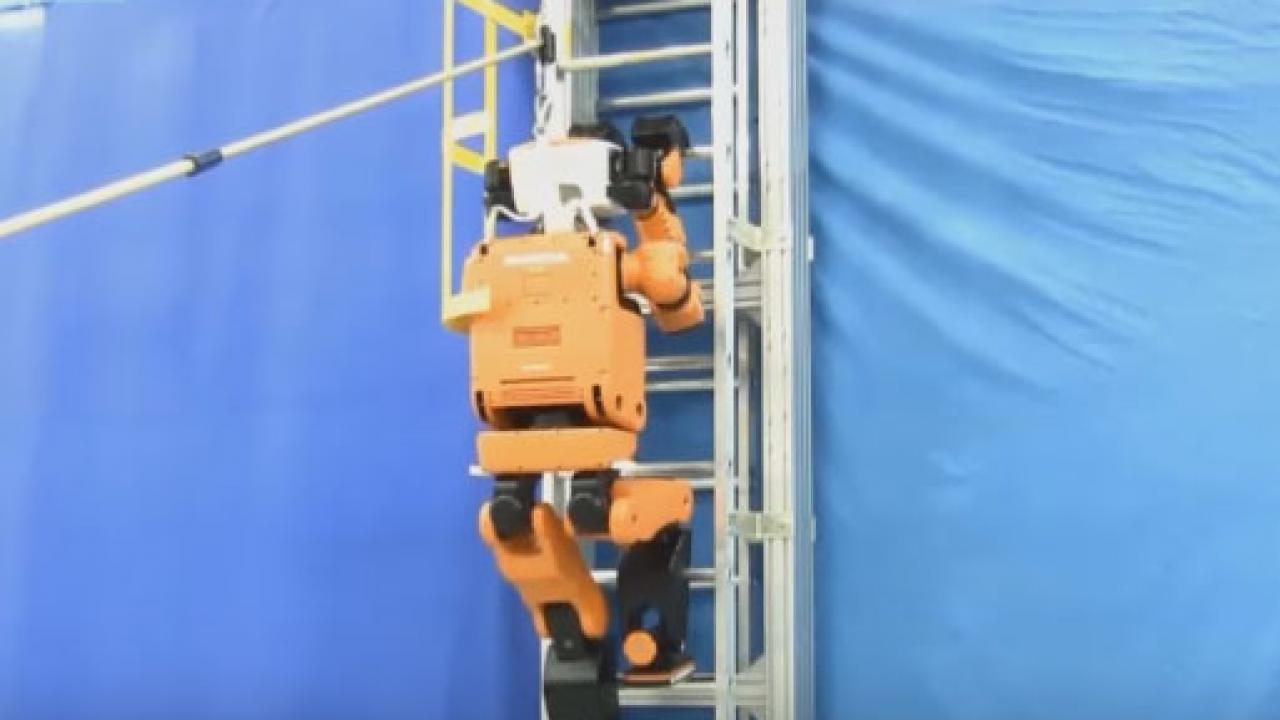
이동성
보행, 계단 및 수직 사다리 오르기, 기어가기, 잔해 통과, 문 통과; 몸통 180도 회전으로 무릎 방향을 바꿔 가파른 계단 등반
의의
E2-DR은 혼다가 견고한 실제 환경의 휴머노이드 로보틱스로 진지하게 나아간 첫 번째 공개적 단계였습니다. 이는 ASIMO의 통제된 시연과는 뚜렷이 대비됩니다. 요구 사항 목록(사다리, 잔해, 좁은 틈, 문, 높은 곳에서의 낙상 방지)은 후쿠시마 원전 사고 및 DARPA 로보틱스 챌린지 같은 사건에서 얻은 교훈을 직접 반영합니다. 계단에서의 180도 몸통 회전 기술은 DARPA에서 우승한 DRC-HUBO가 사용한 접근법과 유사합니다. 프로토타입으로서 E2-DR은 배치된 시스템이 아닌 연구 이정표로 남아 있습니다.
E2-DR 대(對) 관련 로봇들
E2-DR vs 혼다 ASIMO: 완전히 반대되는 설계 철학 — ASIMO는 친근한 시연 로봇, E2-DR은 견고하고 방수되는 재난용 기계.
E2-DR vs DRC-HUBO: 둘 다 재난 대응 휴머노이드; 가파른 계단을 위해 몸통 회전을 사용. DRC-HUBO는 2015 DARPA 로보틱스 챌린지에서 우승.
E2-DR vs 가와사키 카레이도: 둘 다 일본의 재난 대응 휴머노이드 — 가와사키는 여러 세대에 걸쳐 카레이도를 계속 개발한 반면, 혼다는 E2-DR을 상용화하지 않았습니다.
The Honda E2-DR is a research prototype and has never been offered for sale. No price has been published. Any figure circulating online is speculative. Honda has not indicated any intent to commercialize it.
It can walk bipedally at up to 2.7 km/h, crawl under low obstacles, climb ladders, and operate simple tools with its grippers. Its IP67 rating allows operation in heavy rain, dust, and temporary submersion. It uses stereo cameras and 3D LIDAR for autonomous navigation.
No. As of 2026, the E2-DR remains a research-only platform within Honda R&D. It is not available for purchase, lease, or rental, and no units have ever been sold to external organizations.
Both are research-grade bipedal humanoids, but Atlas uses high-pressure hydraulics for explosive, dynamic motions (backflips, parkour) while E2-DR uses electric motors and harmonic drives for quieter, more sealed operation. E2-DR has IP67 protection; Atlas lacks environmental sealing. Atlas is lighter (~89 kg vs 85 kg) but neither is commercially available.
Height: ~1.68 m, weight: ~85 kg, degrees of freedom: 33, max speed: 2.7 km/h, battery life: ~2 hours, IP67 dust/water protection, sensors: stereo cameras, 3D LIDAR, IMU, force/torque feet and hands.
It is built by Honda Motor Co., Ltd., headquartered in Minato, Tokyo, Japan. Honda has a long history in humanoid robotics starting with ASIMO. The E2-DR project was developed by the company’s R&D division.
The battery lasts approximately 2 hours under typical operation. It is not swappable, and charging time has not been publicly disclosed. This limits continuous deployment in the field.
No industries currently deploy the E2-DR as it is a prototype. Its intended sectors include disaster response, nuclear decommissioning, and hazardous industrial inspection, but it has only been used internally at Honda for research.