혼다 P1 — 사양 및 역사 — Specs, Price & Where to Buy (2026)
혼다 P1("프로토타입 1")은 1993년에 제작된 혼다 P시리즈 최초의 휴머노이드 로봇입니다. 다리와 몸통, 팔을 결합한 최초의 혼다 로봇입니다.
💰가격
—
📅최초 제작
1993
🌍출신
JP
📏높이
192 cm
⚖️무게
175 kg
🦾자유도
30
🏃최고 속도
Not published
📦적재량
Not formally rated
🔋배터리
N/A
🛒가용성
구매 불가
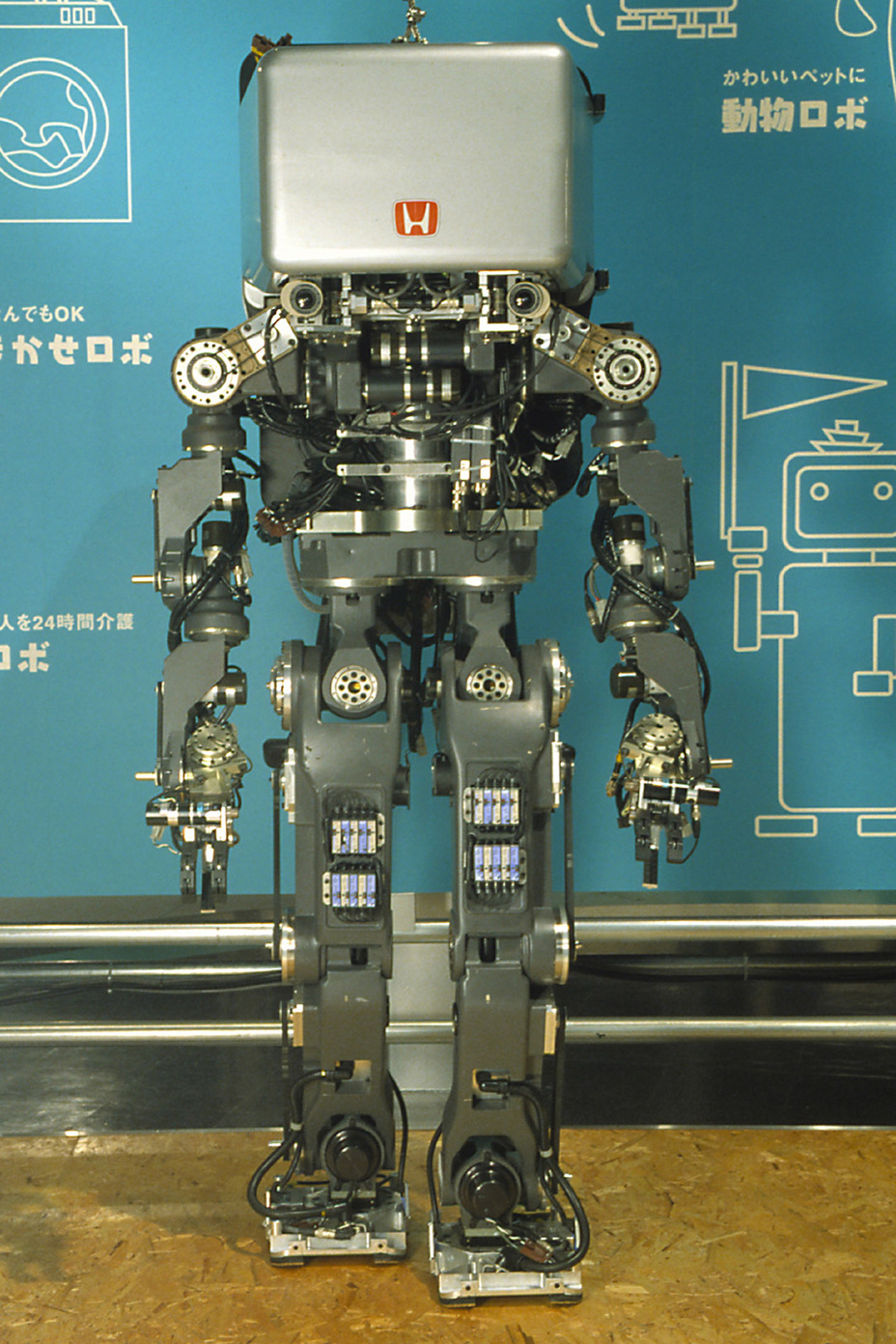
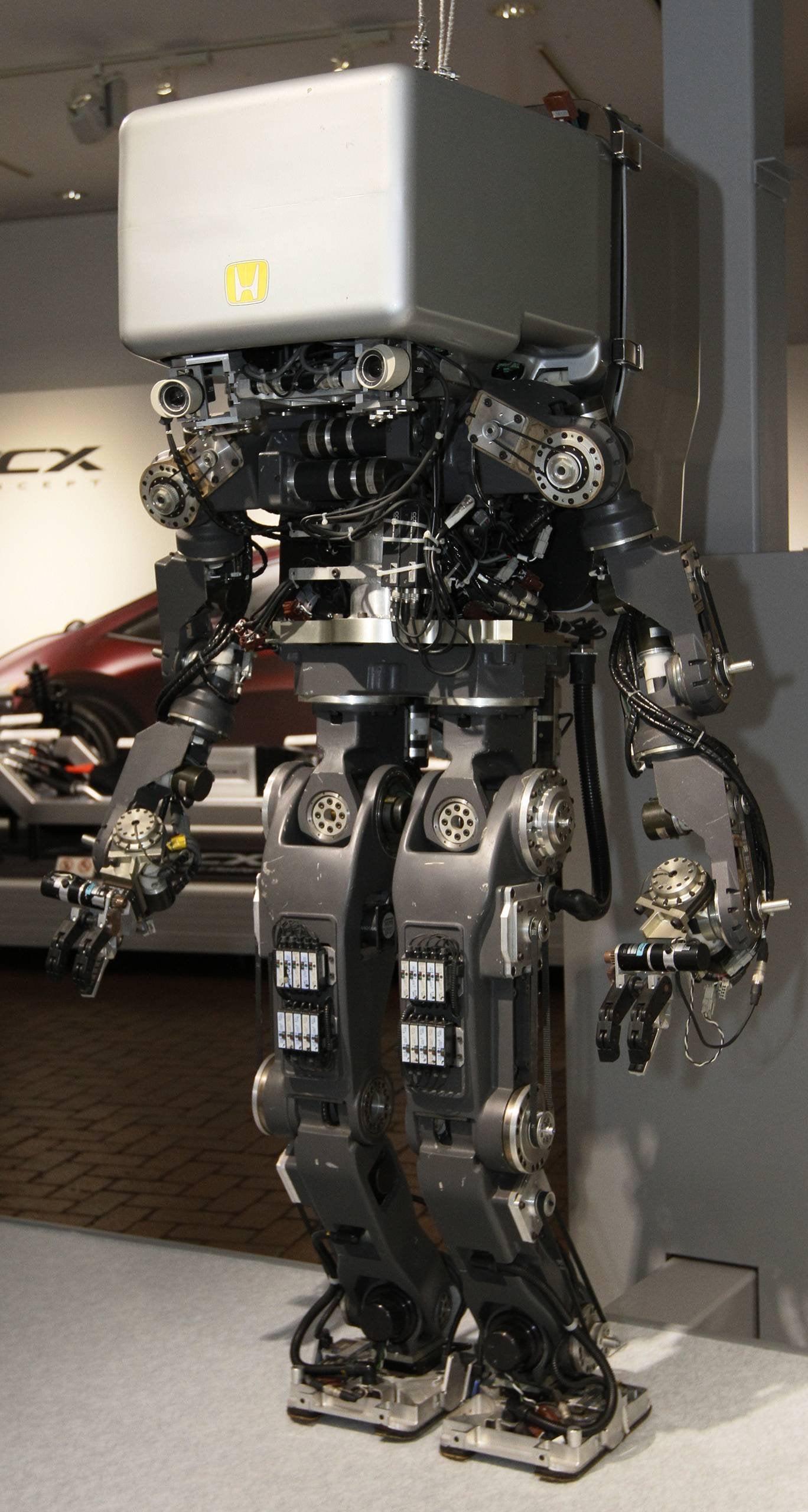
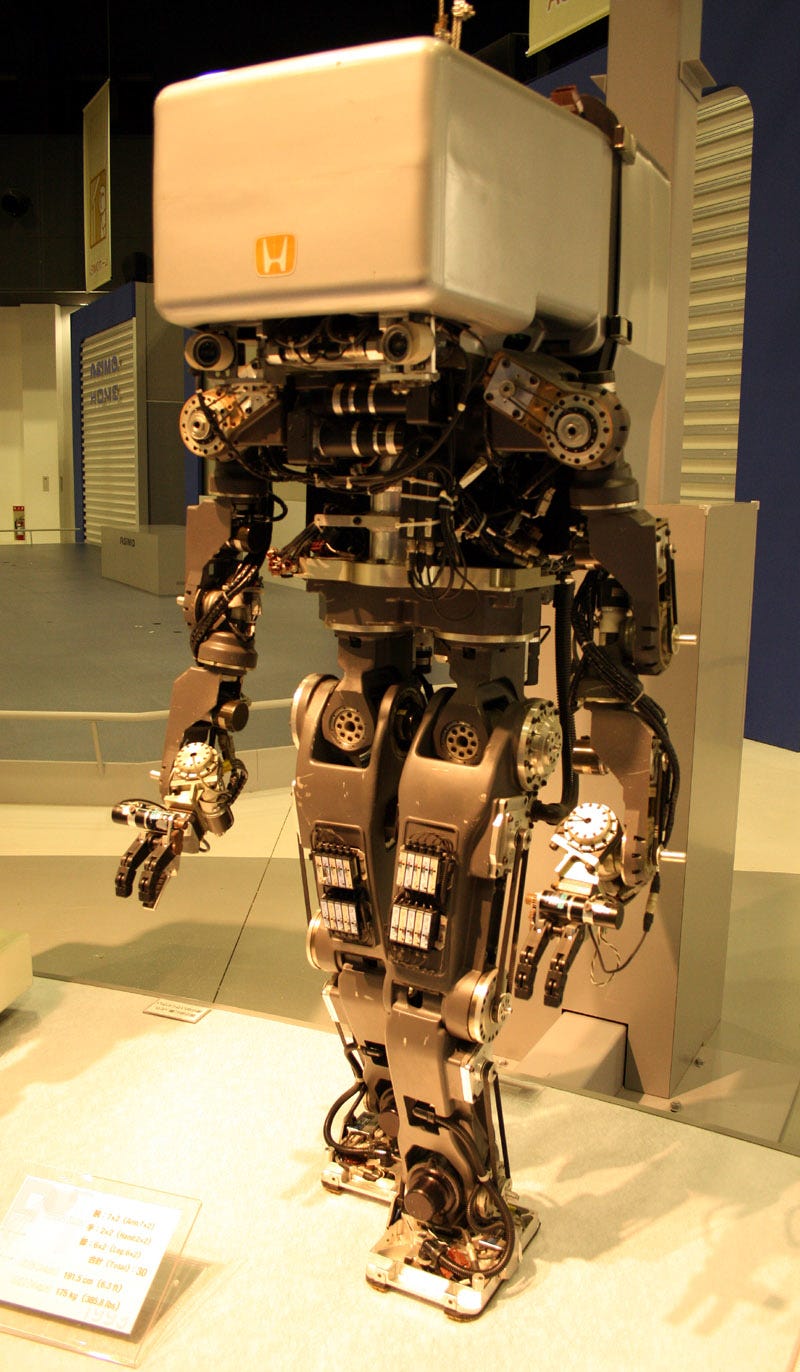
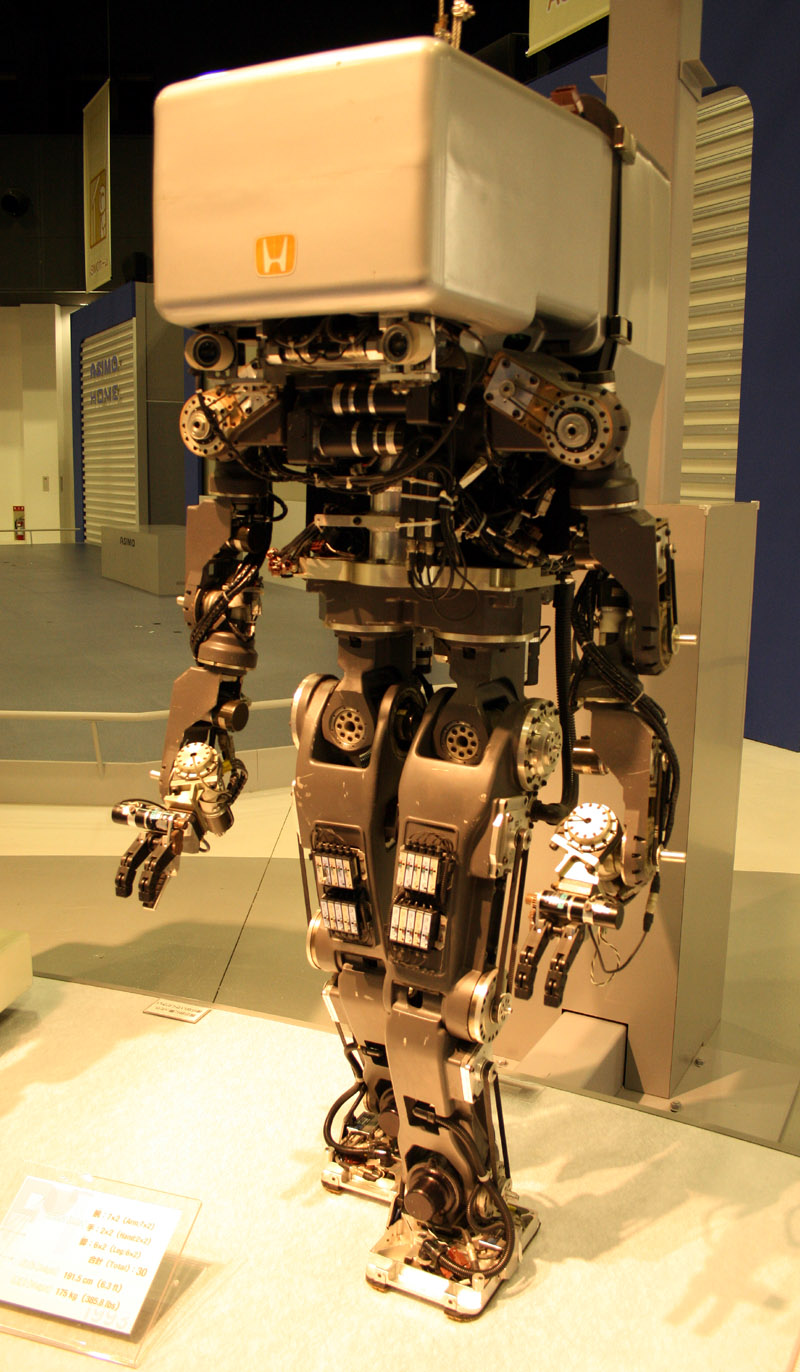
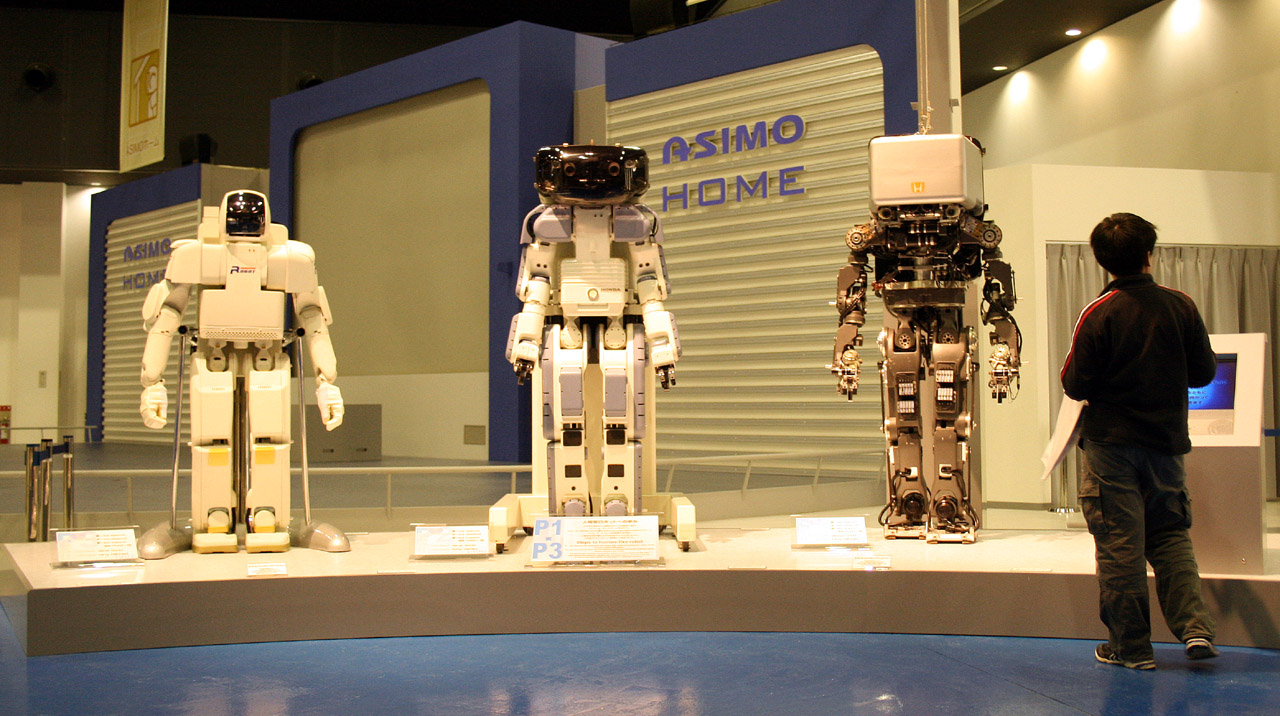
혼다 P1("프로토타입 1")은 1993년에 제작된 혼다 P시리즈 최초의 휴머노이드 로봇입니다. 혼다 로봇 중 처음으로 다리와 몸통, 팔, 머리를 결합했습니다. 이전의 E시리즈(E0–E6, 1986년부터)는 다리만으로 이족 보행을 개발했었습니다. P1은 혼다의 오랜 휴머노이드 프로그램이 비로소 인간의 형태를 갖추게 된 순간이었습니다. 혼다는 1996년 P2를 공개할 때까지 P1의 존재를 비밀로 유지했습니다.
가용성
P1은 연구용 프로토타입이었으며 상업적으로 판매되거나 제공된 적이 없습니다. 내부 혼다 R&D의 이정표였을 뿐, 제품이 아니었습니다. 가격도, 판매 목록도 없었습니다. 오직 혼다의 휴머노이드 공학 발전만을 위해 존재했습니다.
팔다리 비율은 일반적인 문과 계단 치수에서 도출되어 로봇이 인간 환경에서 기능할 수 있도록 함
의의
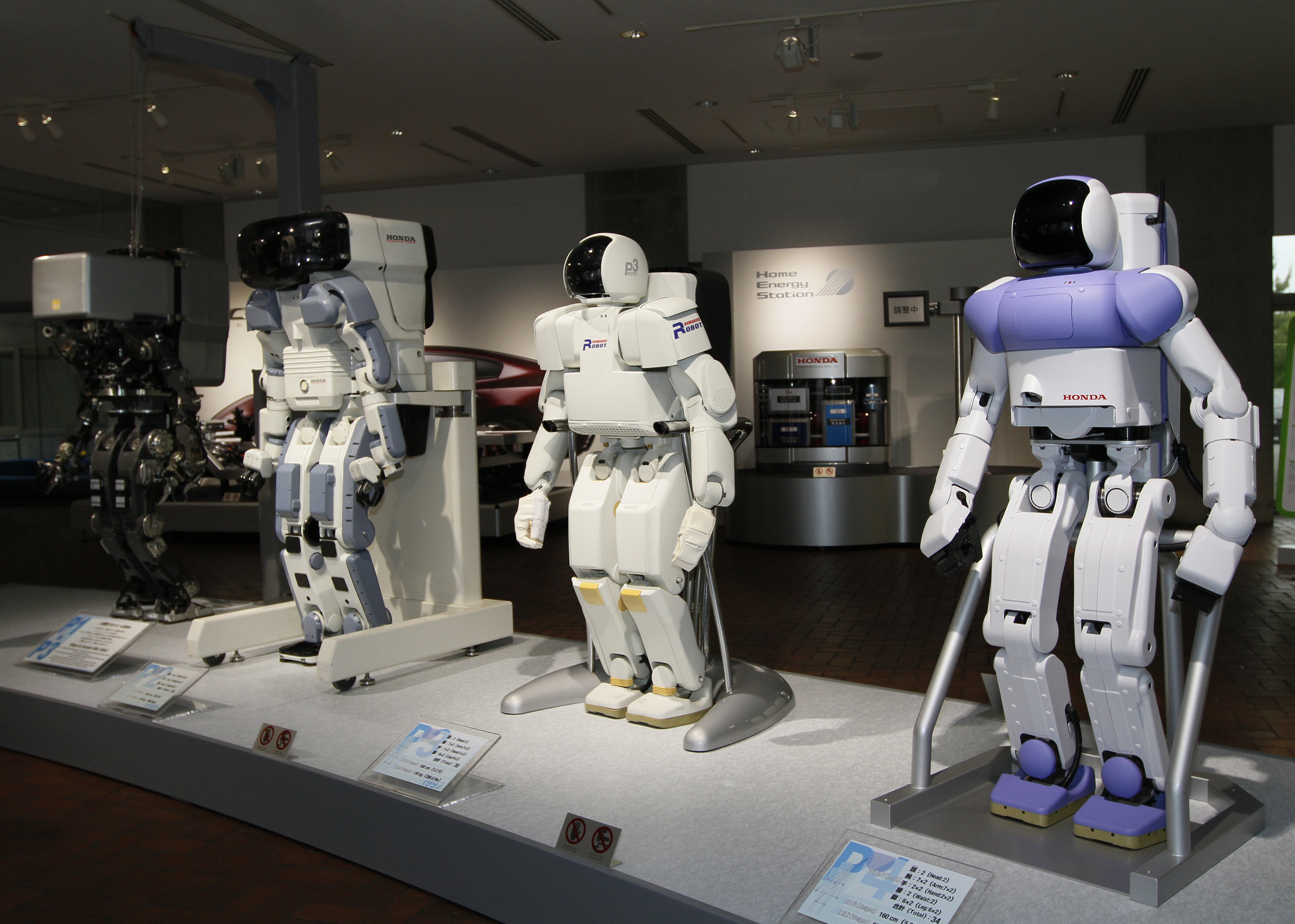
P1은 크고 무거웠으며 외부 전원과 컴퓨팅에 연결되어 있었지만, 혼다가 기능적인 팔과 다리를 가진 조화로운 인간형 로봇을 만들 수 있음을 증명했습니다. 연구는 팔과 다리의 협응 동작에 집중되었습니다. 이는 더 작고 독립적인 P2와 P3, 그리고 궁극적으로 ASIMO로 가는 방향을 제시했습니다.
P1 vs 후속 모델
P1 vs 혼다 P2: P2는 획기적인 발전이었습니다. 케이블을 없애고 온보드 배터리와 무선 제어로 최초의 자율적이고 자체 조절 가능한 이족 보행을 달성했습니다.
P1 vs 혼다 P3: P3는 디자인을 극적으로 소형화(160cm, 130kg)하여 인간의 생활 공간에 적합하도록 했습니다.
P1 vs 현대 휴머노이드: 케이블에 연결된 1993년 프로토타입으로서 P1은 역사적 기초입니다. 오늘날의 상용 휴머노이드와 제품으로서 비교할 수는 없지만, 이 분야 전체의 직접적인 조상입니다.
The Honda P1 was never sold commercially; it was a confidential research prototype. No public price exists. Estimated value as a historical artifact would be purely speculative.
The P1 demonstrated stable bipedal walking, stair climbing, and basic manipulation like turning light switches and grasping doorknobs. It lacked autonomous navigation and relied on tethered computing.
No. The P1 was never a product and is not available for purchase. The few units built are retained by Honda for historical reference. No used market exists.
The P1 was tethered, with external power and computing, while the P2 (1996) integrated batteries and an onboard computer for untethered walking. The P2 was shorter (1.82 m) and lighter (210 kg) with an improved control system.
Height: 1.92 m, Weight: 175 kg, 30 DOF, external power, no battery, payload not rated, max speed unpublished. Actuated by DC servo motors with harmonic drives.
The Honda P1 was developed by Honda Motor Co., Ltd., headquartered in Tokyo, Japan (founded 1946). It was built at the company’s Wako Research Center as part of a secret humanoid project starting in 1986.
The P1 had no onboard battery. It relied on an external power supply via tether, so runtime was essentially unlimited as long as connected to the power source and computer.
The P1 was not deployed in any industry. It was a pure research platform for bipedal locomotion development within Honda’s R&D division.
The original P1 is not publicly demonstrated; it is preserved in Honda's collection hall. Its operational status is unknown, but it likely requires original 1990s tethered infrastructure.
Yes, the P1 led directly to the P2 (1996), then P3 (1997), and ultimately the famous ASIMO (2000). Each successor added more autonomy and compactness.