혼다 P2 — 사양과 역사 — Specs, Price & Where to Buy (2026)
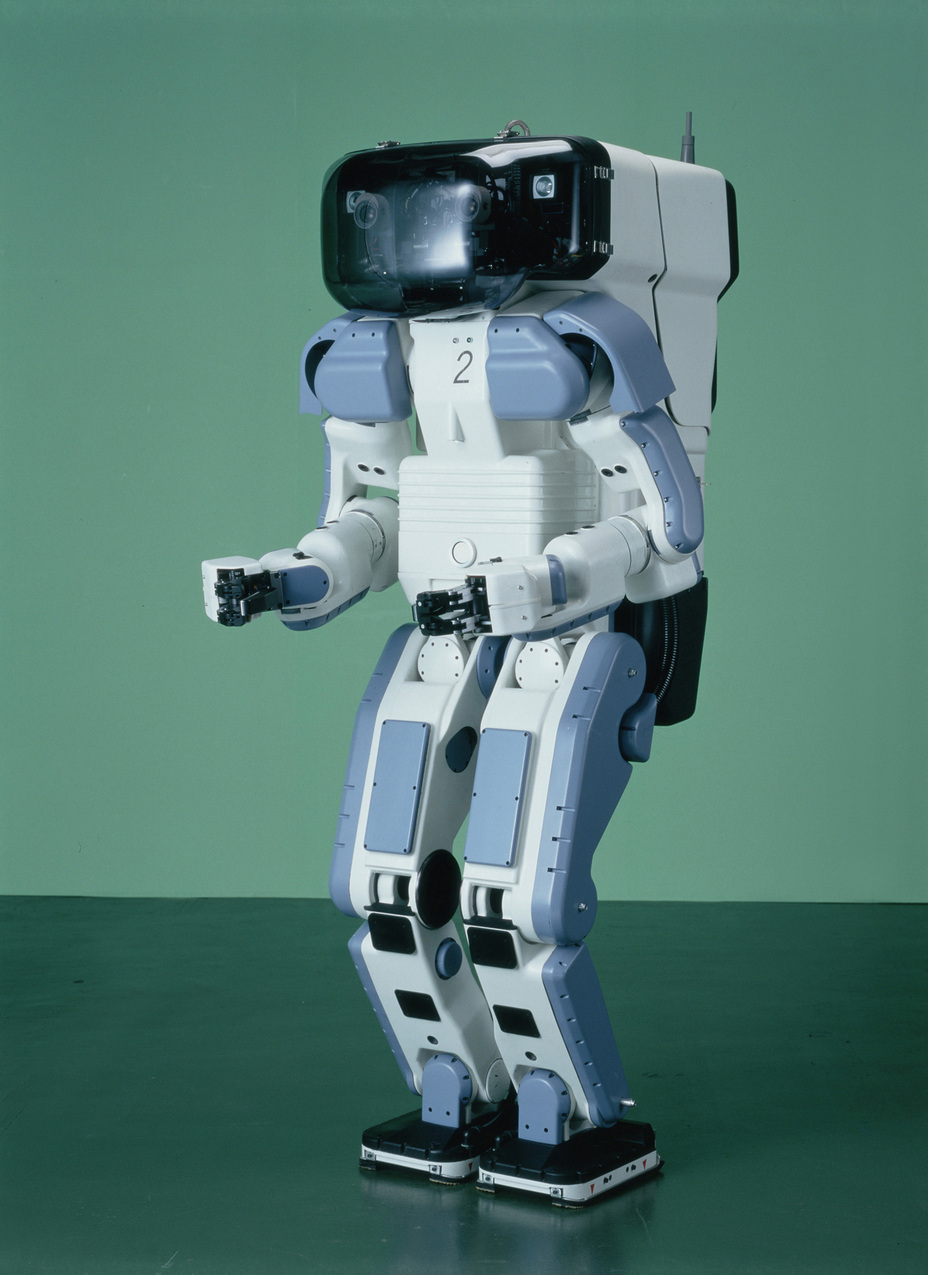
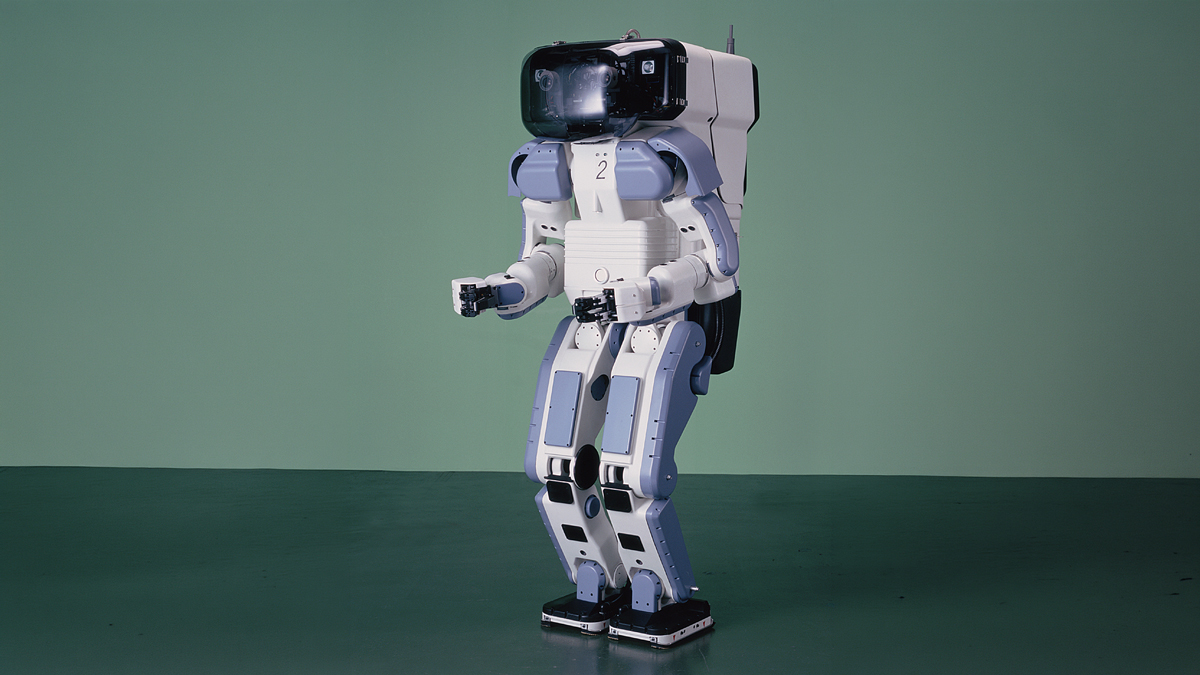
1996년 12월 공개된 혼다 P2(프로토타입 2)는 역사적으로 가장 중요한 로봇 중 하나로, 세계 최초의 자율 이족보행 휴머노이드 로봇입니다.
💰가격
—
📅최초 제작
1996
🌍출신
JP
📏높이
182 cm
⚖️무게
210 kg
🦾자유도
30
🏃최고 속도
2 km/h
🔋배터리
0.25 hours
🛒가용성
구매 불가
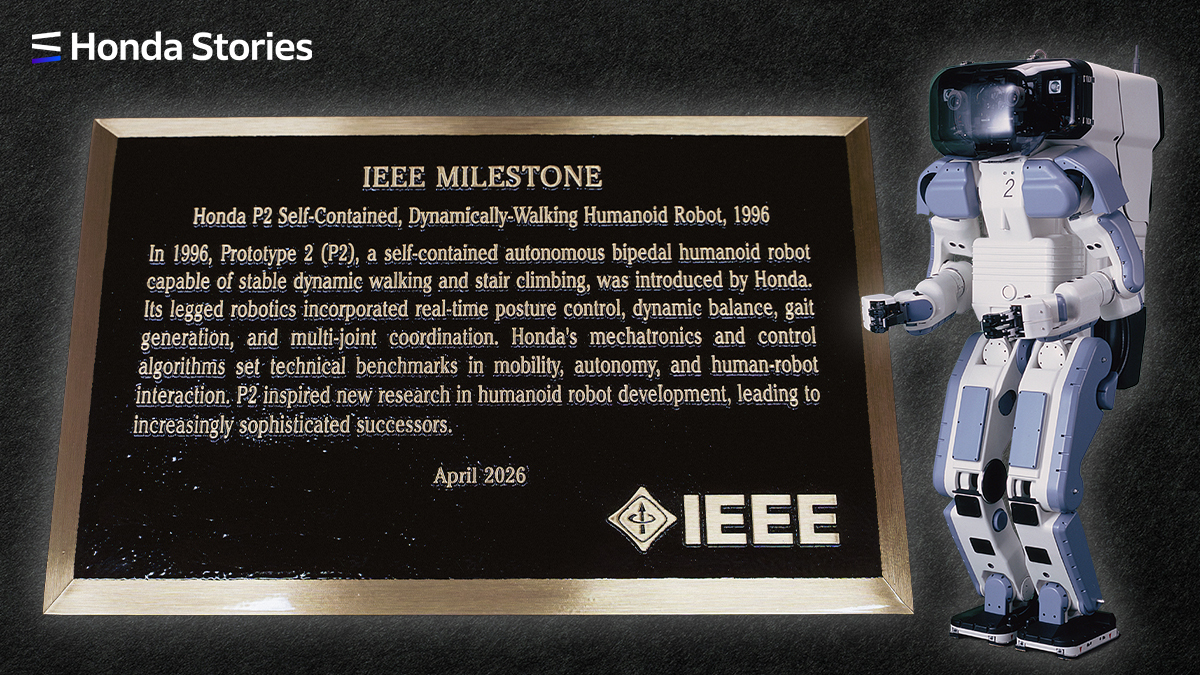
1996년 12월 공개된 혼다 P2('프로토타입 2')는 역사적으로 가장 중요한 로봇 중 하나입니다. 세계 최초로 외부 케이블 없이 자체 배터리와 무선 제어로 두 발로 걷는 자율 이족보행 휴머노이드 로봇이었죠. 이 로봇의 공개는 로봇 공학계를 충격에 빠뜨렸으며, 휴머노이드 로봇을 소수의 학문적 관심사에서 본격적인 공학 분야로 전환시킨 계기로 널리 평가받습니다. 혼다의 P2는 이후 IEEE 마일스톤으로 지정되었습니다.
구매 가능 여부
P2는 연구용 프로토타입으로, 상업적으로 판매된 적이 없습니다. 혼다는 이 로봇을 통해 실용적인 자율 이족보행이 가능함을 입증했습니다.
전체 사양
항목
값
연도
1996년 12월
키
약 1.82m
무게
약 210kg
전원
내장 배터리(자체 전원)
제어
무선
기능
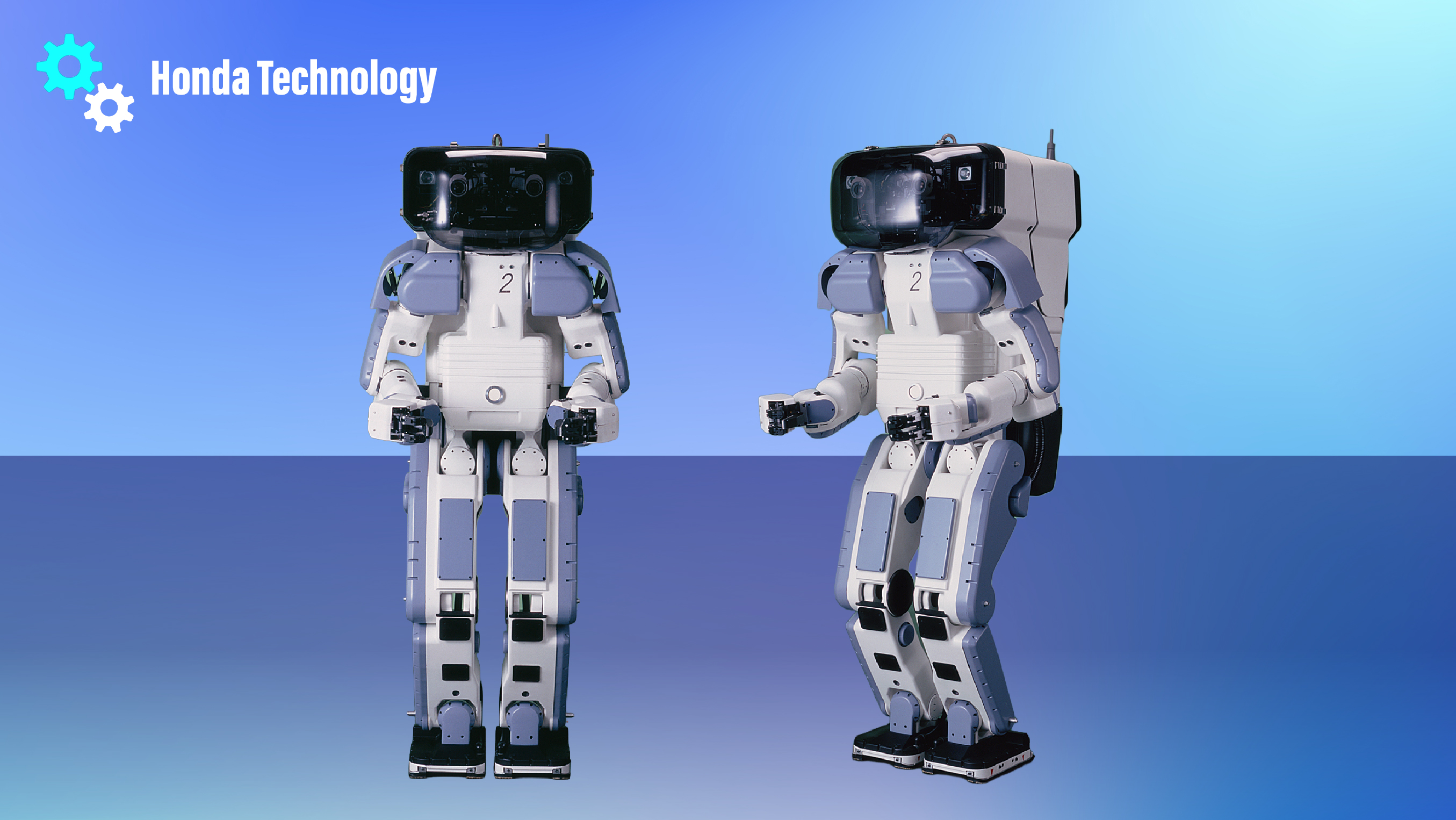
자율 이족보행, 계단 오르내리기, 카트 밀기
특징
세계 최초의 자율 이족보행 휴머노이드 로봇
역사적 의의
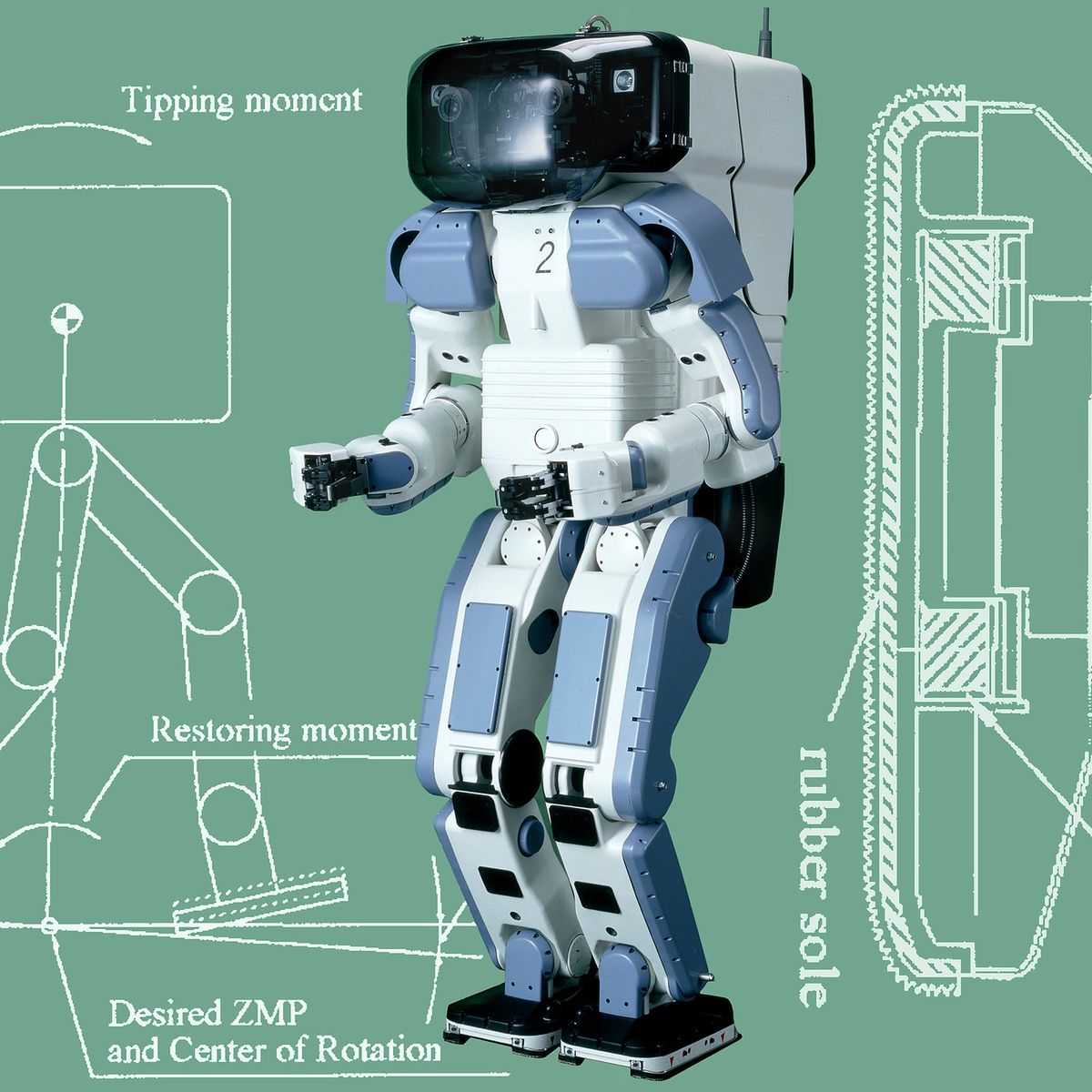
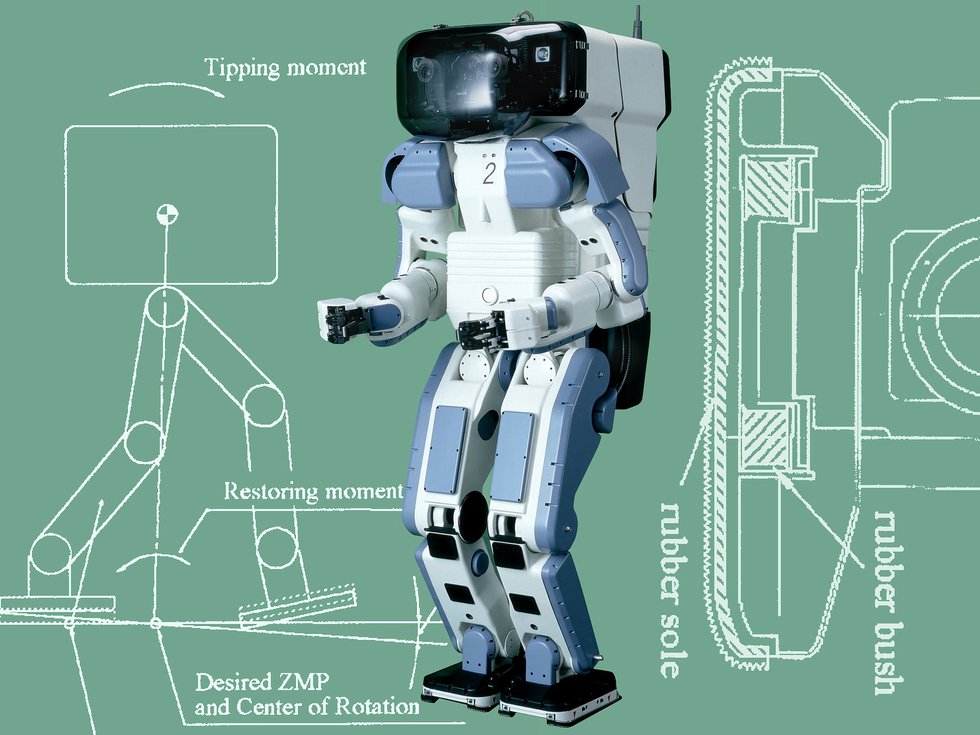
P2의 중요성은 아무리 강조해도 지나치지 않습니다. 외부 케이블 없이 스스로 균형을 잡으며 두 발로 걷는 데 성공함으로써, 휴머노이드 로봇이 실험실에 갇힌 존재가 아닌 독립적인 기계가 될 수 있음을 증명했습니다. IEEE 마일스톤 인증에서 언급했듯이, P2는 로봇 공학의 초점을 순수 산업용에서 인간 중심 설계로 전환시켰습니다. P2가 이룩한 모션 제어, 센서 통합, 실시간 반응 속도의 발전은 ASIMO의 기술적 토대가 되었으며, 간접적으로는 현대 휴머노이드 산업 전체의 기초를 마련했습니다.
P2와 관련 로봇 비교
P2 vs 혼다 P1: P2는 P1의 외부 케이블을 제거했습니다. 내장 배터리와 무선 제어로 최초의 진정한 자율 이족보행 휴머노이드가 되었습니다.
P2 vs 혼다 P3: P3는 P2의 혁신을 이어받아 인간 규모의 환경에 맞게 소형화했습니다.
P2 vs 현대 휴머노이드: 오늘날의 모든 자율 이족보행 휴머노이드 — Optimus, Figure, G1 — 는 개념적으로 1996년 P2의 시연에서 그 선을 이어받습니다.
The Honda P2 was never sold commercially. It was a research prototype built in the mid-1990s. No MSRP exists, and any units today are held by museums or Honda’s own collection.
The P2 can walk autonomously on flat surfaces and climb stairs, push a cart, and maintain balance without external tethers. It walks at speeds up to 2 km/h and operates for about 15 minutes on a single charge.
No. The P2 is a discontinued historical prototype and not available for purchase. Some units may be displayed in museums; otherwise, it is no longer in production or distribution.
The P2 is the direct predecessor to ASIMO. While the P2 was large (210 kg, 1.82 m) and slow, ASIMO was much smaller (130 cm, 48 kg) and faster (2.7 km/h walking, up to 9 km/h running for later versions). ASIMO had more advanced computing and smoother motions, building on the P2's foundational technology.
Height: 1.82 m, weight: 210 kg, 30 degrees of freedom, battery life: 15 minutes, max speed: 2 km/h, powered by nickel-zinc batteries, controlled by an onboard proprietary computer.
Honda Motor Co., Ltd., headquartered in Tokyo, Japan, developed the P2. Honda founded in 1948, began humanoid robotics research in the late 1980s, and unveiled the P2 in December 1996.
The P2’s battery life is approximately 15 minutes, using a 138V/6Ah nickel-zinc battery pack that weighed about 20 kg. The battery was not swappable in the original design.
The P2 is an IEEE Milestone robot, recognized as the first autonomous bipedal humanoid. It directly led to the P3 and ASIMO and influenced modern humanoid robotics, proving that self-contained walking was feasible.
The P2 could walk up to 2 km/h (0.56 m/s), which was slow but sufficient to demonstrate stable bipedal gait without external support.
The P2 had 30 degrees of freedom, distributed across its legs, arms, and torso, enabling coordinated walking and basic manipulation tasks.