혼다 P3 — 사양 및 역사 — Specs, Price & Where to Buy (2026)
혼다 P3("프로토타입 3")는 1997년 9월에 완성된 완전 자율 이족보행 휴머노이드로, P2 대비 소형화된 인간형 로봇입니다.
💰가격
Undisclosed
📅최초 제작
1997
🌍출신
JP
📏높이
160 cm
⚖️무게
130 kg
🦾자유도
28
🏃최고 속도
2 km/h
🔋배터리
0.42 hours
🛒가용성
구매 불가
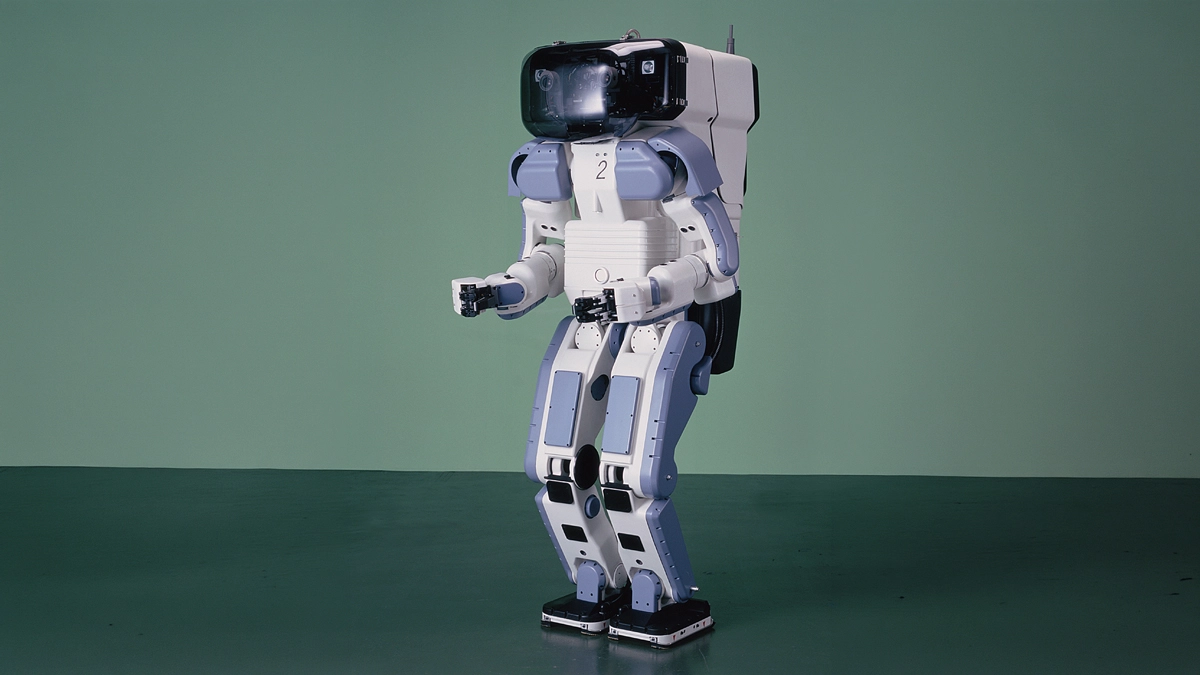
혼다 P3("프로토타입 3")는 1997년 9월에 완성된 혼다 P 시리즈의 세 번째이자 마지막 로봇으로, 완전히 독립적이고 자율적인 이족보행 휴머노이드로서 훨씬 더 작고 인간에 가까운 형태를 가진 최초의 로봇입니다. 부품 재료를 개선하고 분산 제어 시스템을 채택함으로써 혼다는 P2에 비해 상당한 소형화와 무게 감소를 달성하여 인간의 생활 환경에 적합한 크기에 더 가까워졌습니다. P3는 ASIMO의 직전 모델입니다.
가용성
P3는 연구용 프로토타입으로, 상용 제품이 아닙니다. 워크스테이션에서 제어되었습니다(ASIMO는 이후 휴대용 컨트롤러 작동을 추가했습니다). 이는 혼다 휴머노이드 프로그램에서 ASIMO 이전의 마지막 단계를 대표합니다.
전체 사양
사양
값
연도
1997년 9월
높이
~1.60m
무게
~130kg
제어 방식
분산 제어 시스템, 워크스테이션에서 작동
주요 발전
개선된 재료와 분산 제어를 통한 소형화 및 경량화
기능
완전 자율적인 독립 이족보행
중요성
P3는 혼다의 휴머노이드를 인간과 공간을 공유할 수 있는 크기와 무게에 훨씬 가깝게 만들었습니다. 분산 제어 아키텍처와 재료 개선은 더 작은 ASIMO(120~130cm)를 가능하게 한 엔지니어링 단계였습니다. P3는 또한 일본 휴머노이드 로봇 프로젝트(HRP)에서 생산된 변형인 HRP-1의 기반으로서 주목할 만합니다.
P3와 관련 로봇 비교
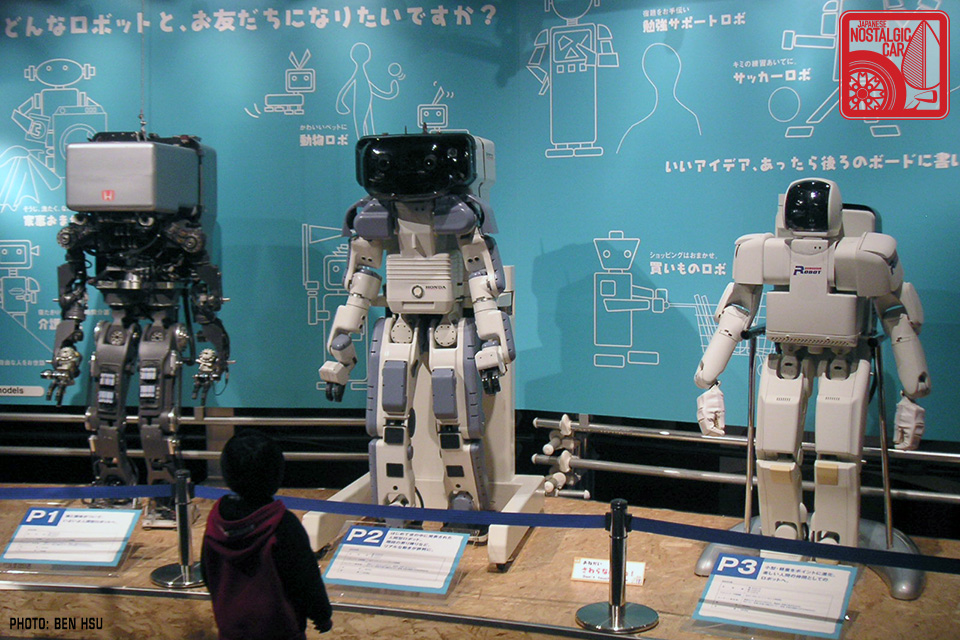
P3 vs 혼다 P2: 동일한 자율 보행 능력을 가지지만, P3는 현저히 작고 가벼워 인간 규모의 실용성을 향한 의도적인 진전입니다.
P3 vs 혼다 ASIMO: ASIMO는 직접적인 후속 모델로, 더 작아지고 "i-WALK" 기술, 음성/얼굴 인식, 달리기 기능을 갖추고 있습니다.
P3 vs HRP-1: 일본 국가 휴머노이드 로봇 프로젝트의 HRP-1은 P3를 기반으로 제작된 변형입니다.
The Honda P3 was never sold commercially; it was a research prototype with no retail price. No new or used units are available on the open market.
It could walk dynamically at up to 2 km/h, climb stairs, recover from pushes, and perform simple arm gestures. It used stereo cameras and foot sensors for balance but lacked advanced manipulation or speech.
No. The P3 is a discontinued research prototype. It was never commercially released, and no units are currently for sale.
The P3 is ASIMO’s direct predecessor. It was taller (1.60 m vs. 1.30 m), heavier (130 kg vs. ~50 kg), and slower (2 km/h vs. up to 9 km/h). ASIMO added refined walking, running, and social interaction capabilities.
Height: ~1.60 m, weight: ~130 kg, degrees of freedom: 28, battery life: 0.42 hours (25 min), max speed: 2 km/h. Payload was not specified.
Honda Motor Co., headquartered in Tokyo, Japan. The P3 was developed at Honda’s Wako Research Center as part of a secret humanoid robotics program that started in the 1980s.
Approximately 0.42 hours, or about 25 minutes of continuous operation. The battery was internal and non-swappable during operation.
None commercially. It was used exclusively for academic and corporate robotics research, primarily in bipedal locomotion, at facilities like Honda’s labs and AIST in Japan.
Modern humanoids like Unitree H1 or Tesla Optimus offer far greater speed, dexterity, and AI integration at prices up to $150,000 or more. The P3 is obsolete by today’s standards but foundational.
The P3 was unveiled in 1997 as the third prototype in Honda’s P-series, following the P1 (1993) and P2 (1996). It directly preceded the ASIMO program launched in 2000.