DRC-HUBO — 스펙 및 역사 — Specs, Price & Where to Buy (2026)
DRC-HUBO(및 DRC-HUBO+)는 KAIST 휴보의 재난 대응 버전으로, 2015 DARPA 로보틱스 챌린지 결선 우승 로봇입니다.
💰가격
—
📅최초 제작
2015
🌍출신
KR
📏높이
147 cm
⚖️무게
60 kg
🦾자유도
41
🏃최고 속도
Not disclosed
🔋배터리
Not disclosed
🛒가용성
구매 불가
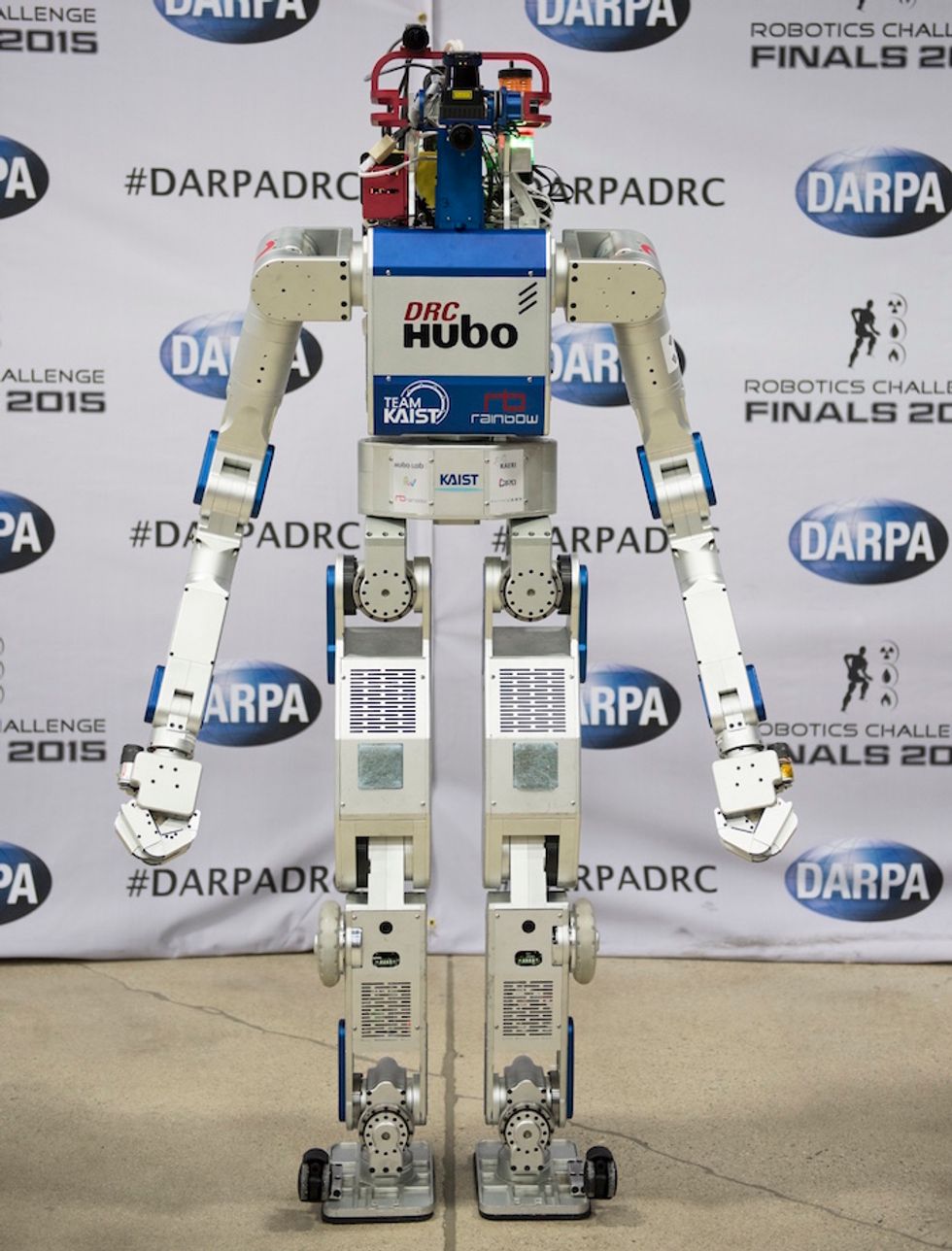
DRC-HUBO(및 개량형 DRC-HUBO+)는 KAIST의 휴보 휴머노이드를 재난 대응용으로 진화시킨 로봇으로, 2015 DARPA 로보틱스 챌린지 결선에서 1위를 차지하여 6개국 23개 팀을 누르고 200만 달러의 상금을 거머쥐었습니다. KAIST의 오준호 교수팀이 제작한 DRC-HUBO는 독창적인 변형 설계로 유명한, 역사상 가장 뛰어난 경쟁 로봇 중 하나입니다.
구매 가능 여부
DRC-HUBO는 경쟁 및 재난 대응 연구용 로봇으로 제작되었습니다. KAIST팀은 DARPA 로보틱스 챌린지를 대비하고 출전하기 위해 여러 대의 DRC-HUBO를 제작했습니다. 레인보우로보틱스를 통해 DRC-HUBO 파생 기술이 회사의 연구용 로봇 제품군에 포함되었지만, DRC-HUBO 자체는 대량 생산되는 제품이 아닙니다. 소비자 가격이나 구매 경로는 없습니다.
전체 사양
사양
내용
개발사
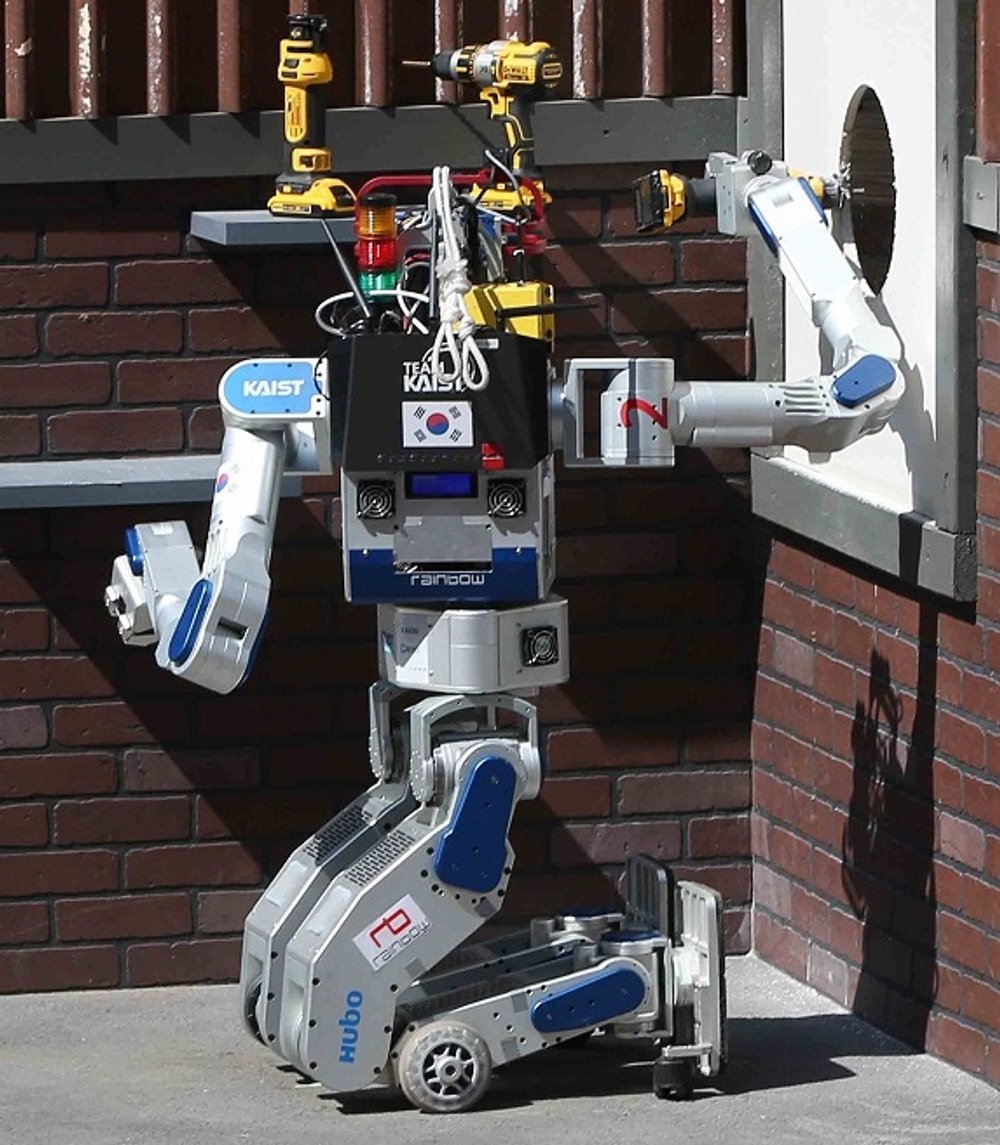
KAIST (KAIST팀, 오준호 교수); 레인보우로보틱스를 통한 상용화 계보
개발 목적
DARPA 로보틱스 챌린지 (2013 예선, 2015 결선)
주요 특징
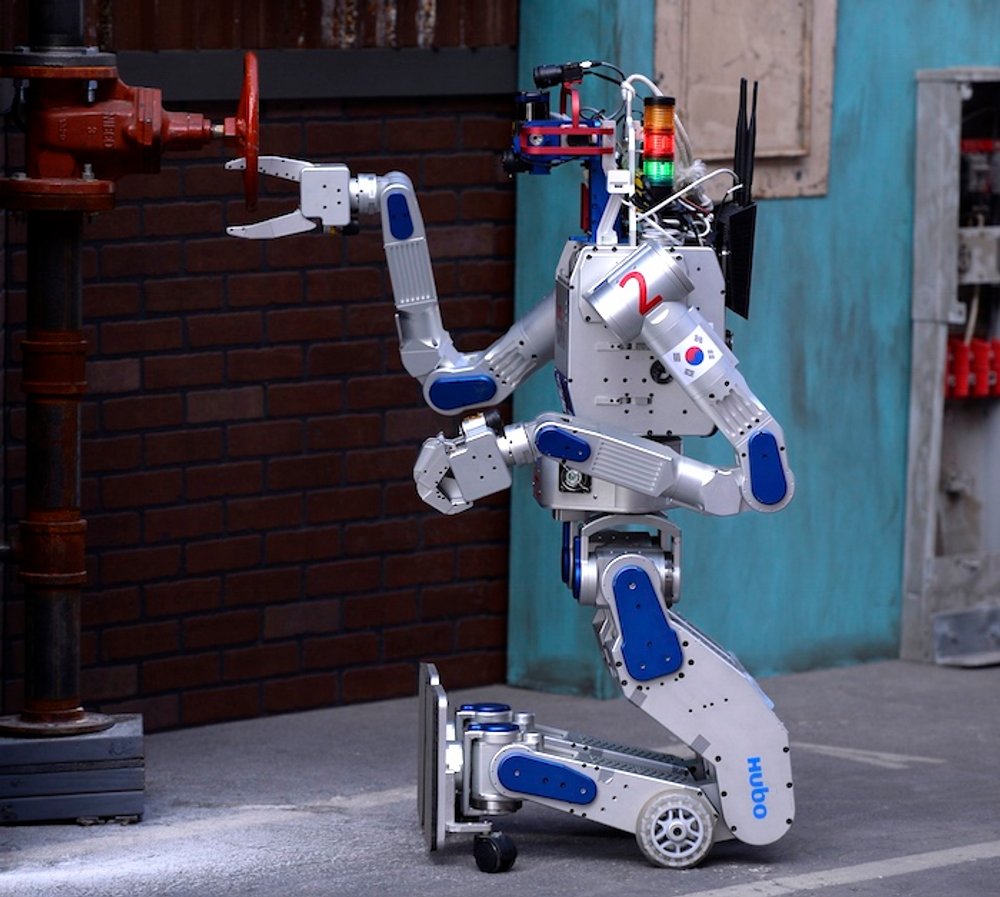
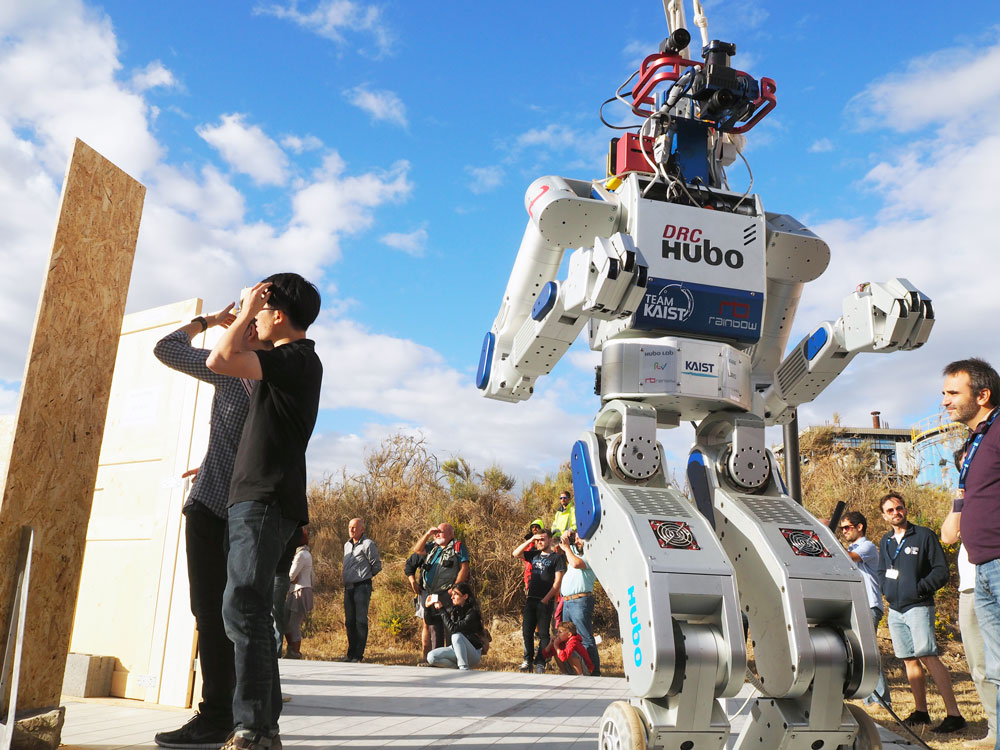
보행형 이족보행과 바퀴형 기계 간 변환 — 무릎에 장착된 동력 바퀴로 평지에서는 구르고, 험지에서는 걸을 수 있음
기동성
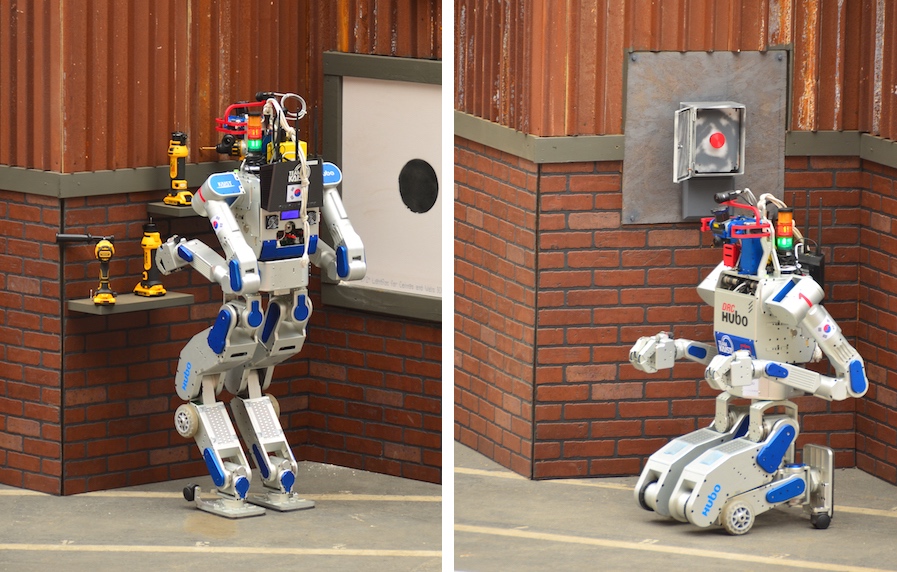
팔을 추가 다리로 사용하여 안정성 확보; 무릎을 꿇고 상체를 인간 범위 이상으로 회전 가능
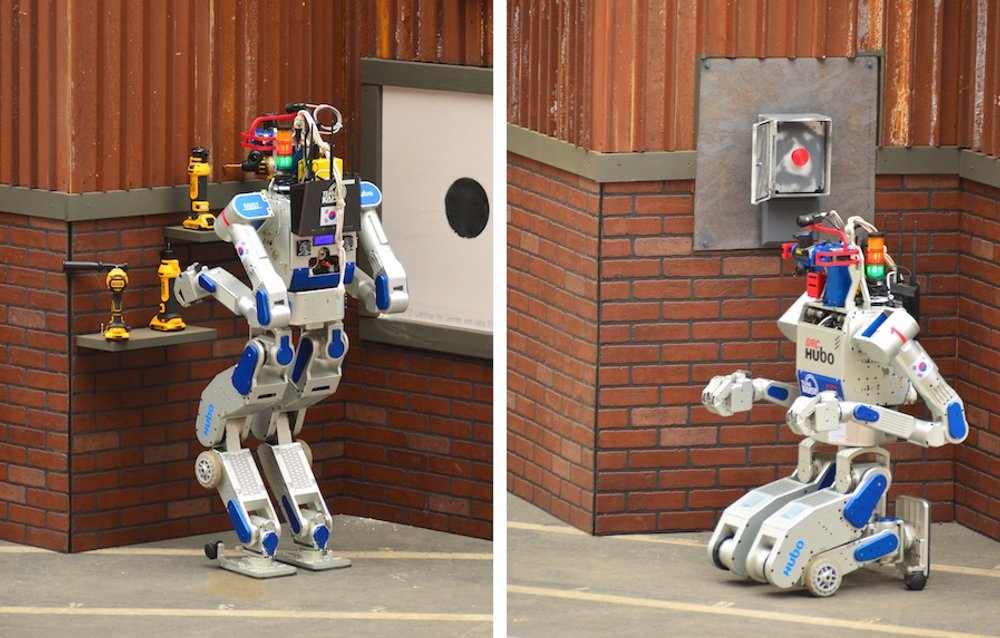
DRC 수행 과제
차량 운전, 문 열기, 공구 사용, 밸브 돌리기, 잔해 통과
성과
2015 DARPA 로보틱스 챌린지 결선 1위 (200만 달러 상금)
주요 활동
DRC-HUBO+는 2018 평창 동계올림픽 성화 봉송에 참여 — 비인간으로서는 최초
의의
DRC-HUBO는 DARPA 로보틱스 챌린지가 드러낸 문제, 즉 순수 이족보행은 재난 현장에서 느리고 불안정하다는 점을 해결했습니다. 오 교수팀은 2013년 예선에서 많은 팀이 이족보행에 어려움을 겪는 것을 목격하고 변형 설계로 대응했습니다. 무릎에 바퀴를 달아 평지에서는 빠르고 안정적으로 구르고, 험지에서는 다리로 걷는 방식입니다. 이러한 통찰력과 휴보의 신뢰할 수 있는 하드웨어가 결합되어 2015년 결선에서 우승했습니다. DRC-HUBO는 실용적인 재난 대응 로봇 분야의 이정표이자 KAIST 휴보 프로그램의 정점으로 평가받고 있습니다.
DRC-HUBO와 관련 로봇 비교
DRC-HUBO vs HUBO / HUBO 2: DRC-HUBO는 변형 이족/바퀴 설계를 갖춘 휴보 라인의 재난 대응 진화형입니다.
DRC-HUBO vs Honda E2-DR: 둘 다 가파른 계단을 처리하기 위해 상체를 회전시키는 재난 대응 휴머노이드입니다. DRC-HUBO는 DARPA 챌린지에서 우승했지만, E2-DR은 혼다의 프로토타입에 머물렀습니다.
DRC-HUBO vs Unitree GD01: 둘 다 지형에 따라 이동 모드를 전환합니다. DRC-HUBO는 자율 경쟁 로봇인 반면, GD01은 조종형 메카입니다.
DRC-HUBO was never sold commercially. Development costs were covered by DARPA and KAIST, likely in the multi‑million‑dollar range. No new or used units are publicly available for purchase.
It can walk bipedally, kneel and drive on knee wheels, climb stairs, open doors, turn valves, cut drywall, and drive a vehicle. All tasks were demonstrated under human teleoperation with advanced balance and manipulation control.
No. It was a one‑off research prototype built for the 2015 DARPA Robotics Challenge. No commercial units exist; any secondary sale would be of decommissioned lab hardware and is extremely rare.
DRC-HUBO uses wheels on knees for fast flat‑ground movement, while Atlas is a purely hydraulic biped with greater over‑rough‑terrain agility. DRC-HUBO won the 2015 DRC due to speed; Atlas excels in dynamic balancing and parkour‑like maneuvers.
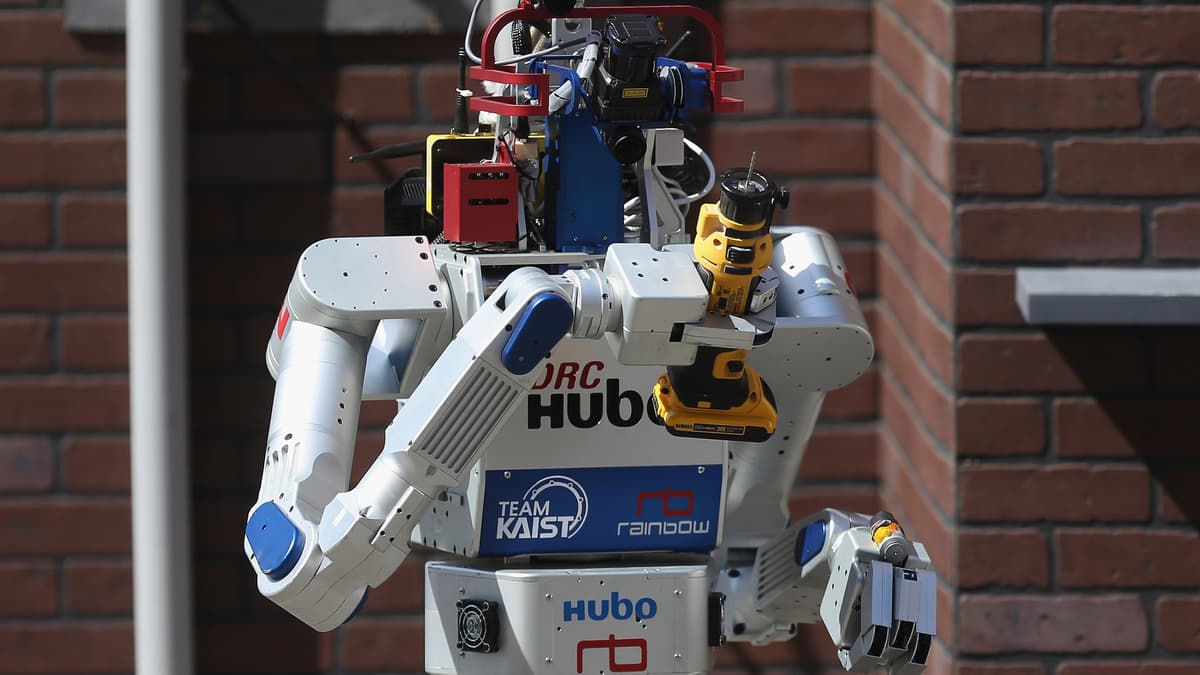
147 cm tall, 60 kg weight, 41 degrees of freedom, 20 kg standing payload, Dynamixel/harmonic‑drive actuators, stereo cameras, LIDAR, IMU, dual Intel i7/NVIDIA GPU compute, Ubuntu with ROS.
It was designed and built by Team KAIST at the Korea Advanced Institute of Science and Technology (Daejeon, South Korea), led by Prof. Jun‑Ho Oh. It is not a product of Rainbow Robotics, despite occasional misattribution.
Battery runtime was not officially published. As a competition robot of 2015, it likely operated for less than an hour of intense mixed mobility/manipulation tasks, typical for DARPA Robotics Challenge entrants.
It is used exclusively in academic research, mainly at KAIST and partner universities, for studying hybrid wheel‑bipedal locomotion, whole‑body control, and human‑robot interaction. No industrial deployments exist.