토요타 Punyo — 사양 및 역사 — Specs, Price & Where to Buy (2026)
Punyo는 토요타 연구소가 2024년 초에 공개한 소프트 바디 휴머노이드 로봇 연구 플랫폼입니다. 전신 조작을 통해 대형 물체를 안전하게 다루는 데 초점을 맞춥니다.
💰가격
$30,000 – $40,000
📅최초 제작
2024
🌍출신
JP
📏높이
200 cm
🦾자유도
53
🏃최고 속도
N/A
🛒가용성
구매 가능
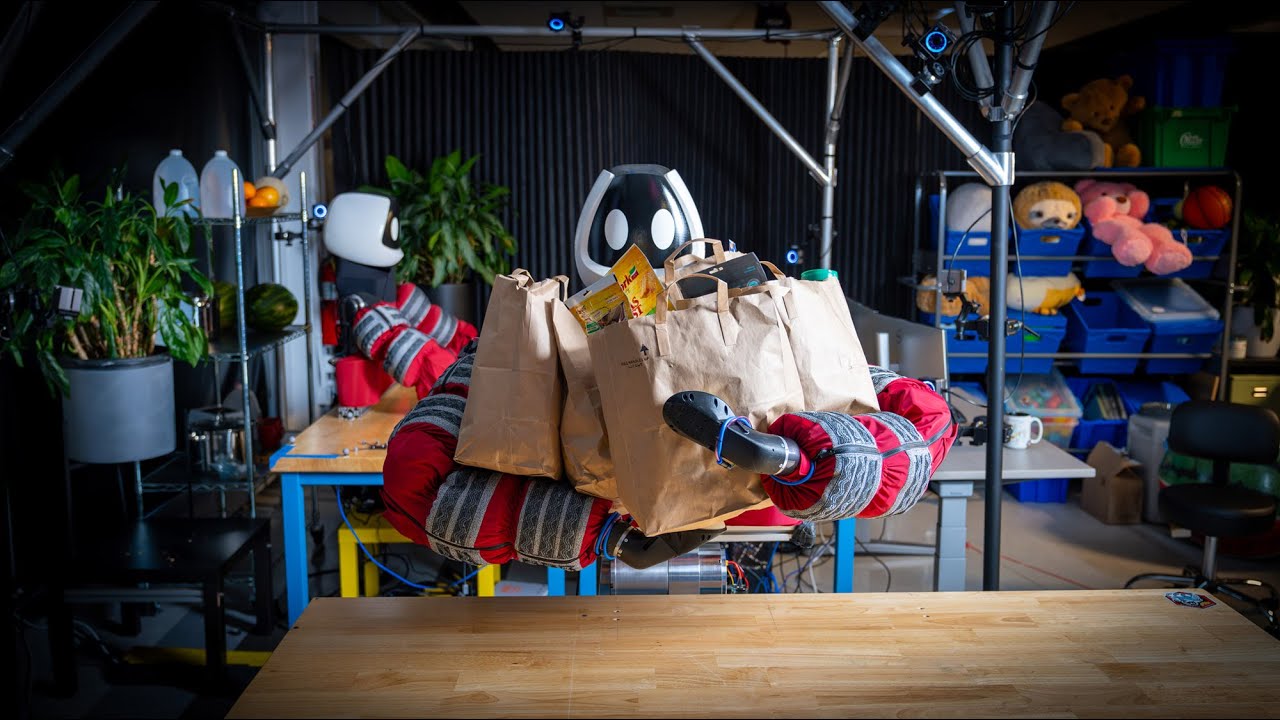
Punyo는 토요타 연구소(TRI)가 2024년 초에 선보인 소프트 바디 휴머노이드 로봇 연구 플랫폼입니다. 이름은 일본어 'ぷにょ(푸뇨)'에서 유래했으며, 부드럽고 귀엽고 탄력 있는 것을 의미합니다. Punyo는 전신 조작(whole-body manipulation) — 사람처럼 손가락과 손끝뿐 아니라 가슴, 팔, 엉덩이를 함께 사용해 부피가 큰 물건을 운반해야 한다는 아이디어 — 를 탐구하기 위해 설계되었습니다. 하반신이 없는 상체형 휴머노이드이며, 안전하고 유능한 미래 가정용 로봇을 위한 TRI의 비전을 구현합니다.
구매 가능 여부
Punyo는 연구 플랫폼이지 제품이 아닙니다. 가격이나 구매 경로는 없습니다. TRI는 이를 명시적으로 전신 조작 연구용 로봇으로 규정하며, 미세 손끝 조작에 대한 별도의 연구와 상호 보완적입니다. TRI는 더 넓은 개념에 대한 설계 목표를 밝혔습니다: 부드럽고, 상호작용 가능하며, 저렴하고, 안전하고, 내구성이 있으며, 유능할 것.
전체 사양
사양
값
첫 공개
2024년 초 (토요타 연구소)
유형
하반신 없는 상체형 소프트 휴머노이드 연구 플랫폼
기본 구조
두 개의 '하드' 로봇 팔, 견고한 상체 프레임, 허리 액추에이터
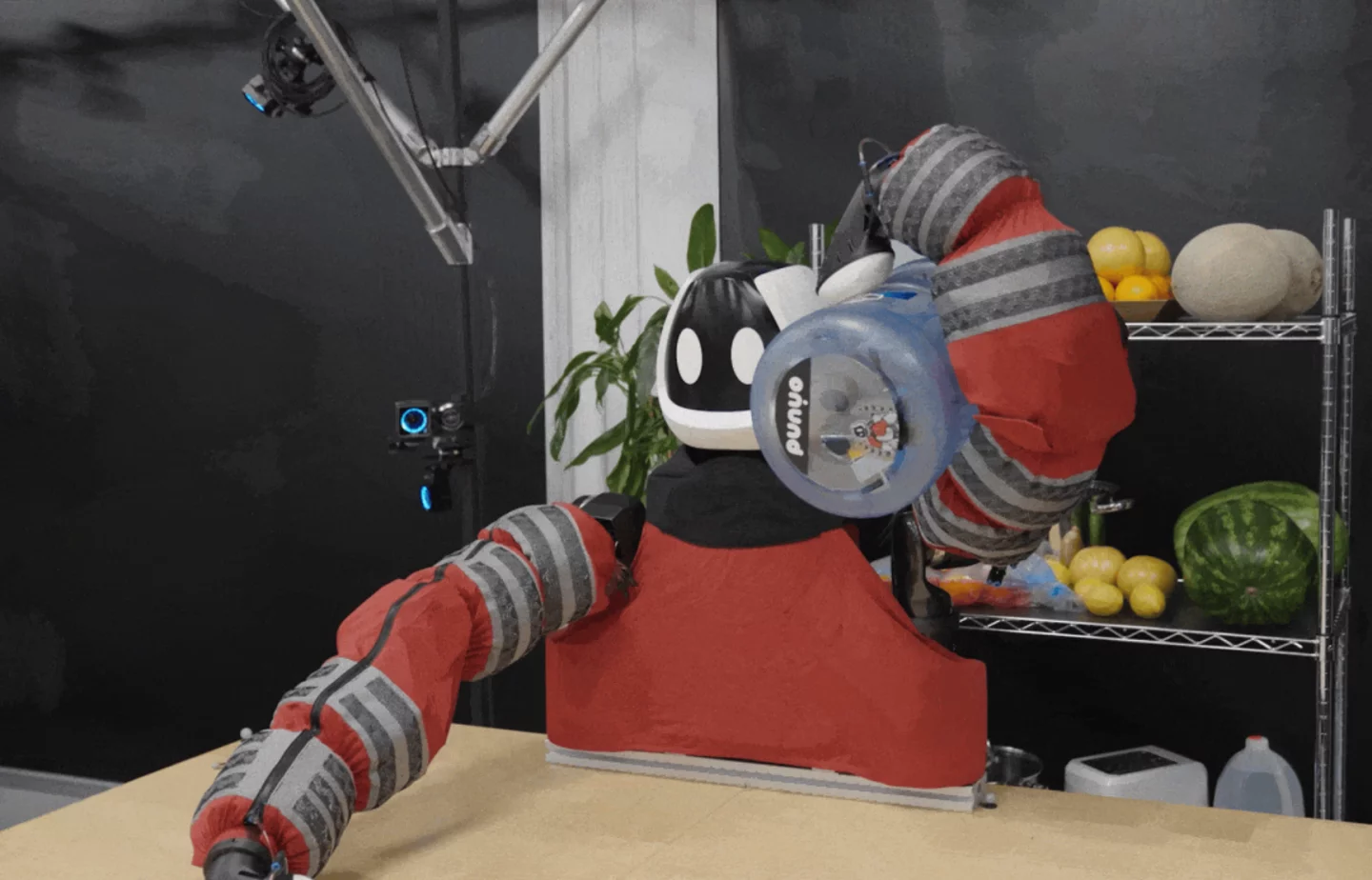
소프트 커버링
공기 주입 블래더('버블')로 팔을 덮음; 각 블래더는 약 5cm의 컴플라이언스를 제공하며 개별적으로 원하는 강도로 가압 가능
힘 감지
블래더는 튜브를 통해 압력 센서에 연결되어 외부 표면에 가해지는 힘을 감지
엔드 이펙터
'발( paws)' — 내부 카메라가 있는 단일 고마찰 라텍스 버블; 인쇄된 점 패턴의 변형을 관찰해 힘 추정
적용 범위
손, 팔, 가슴이 컴플라이언트 소재와 촉각 센서로 덮임
목적
대형·부피가 큰 물체(예: 물병 들어올리기, 서랍 닫기)의 전신 조작
중요성
Punyo는 독특한 설계 철학을 구현합니다. 전통적인 '하드' 로봇의 정밀성, 강도, 신뢰성과 소프트 로봇 시스템의 컴플라이언스, 내충격성, 단순 센싱을 결합합니다. 가슴, 팔, 마찰, 컴플라이언스를 포함한 전신을 사용함으로써, Punyo는 손만 사용하는 로봇보다 적은 에너지로 큰 물체를 잡고 조작할 수 있습니다. TRI는 이것이 더 가볍고, 저렴하며, 안전한 가정용 로봇을 가능하게 할 수 있다고 주장합니다. 이는 도요타가 가정용 로봇이 안전하고 함께 작업하기에 즐거워야 한다고 생각하는 연구 선언문입니다.
Punyo vs 관련 로봇
Punyo vs Toyota T-HR3: 둘 다 도요타의 휴머노이드 연구 노력; T-HR3는 원격 조작과 유연한 관절을 탐구하고, Punyo는 소프트 전신 조작을 탐구합니다.
Punyo vs 1X NEO Gamma: 둘 다 가정용 안전한 소프트 디자인을 추구; NEO Gamma는 출시된 소비자 제품, Punyo는 연구 플랫폼.
Punyo vs Clone Robotics Clone Alpha: 둘 다 강체 링크에서 벗어난 로봇 하드웨어 재고; Punyo는 공압 소프트 버블, Clone Alpha는 수압 인공 근육.
The Toyota Punyo is not for sale; it is a research prototype. No pricing is disclosed. If you are a research institution, contact Toyota Research Institute for potential collaboration.
Punyo performs whole-body manipulation, such as lifting and carrying large objects using its torso, arms, and soft grippers. Its soft air-bladder exterior allows safe physical contact with humans.
No. Punyo is available only for internal TRI research. It is not offered to the public or commercial customers.
HSR is a mobile manipulator with a rigid body designed for fetching tasks, priced around $100,000 USD (est.). Punyo is stationary, soft-bodied, and focused on whole-body manipulation rather than mobility.
53 degrees of freedom, 2000 mm height, soft inflatable body, RGB-D and tactile sensors, electric actuation under a compliant exterior. Weight, payload, and battery life are not publicly specified.
Toyota Research Institute (TRI), a subsidiary of Toyota Motor Corporation, headquartered in Toyota City, Japan. TRI was founded in 2015.
Battery life is not disclosed. As a stationary research platform, it may operate tethered to a power source.
Primarily academic and corporate research labs investigating home robotics, elderly care, and safe human-robot interaction.