What is the Honda P2?
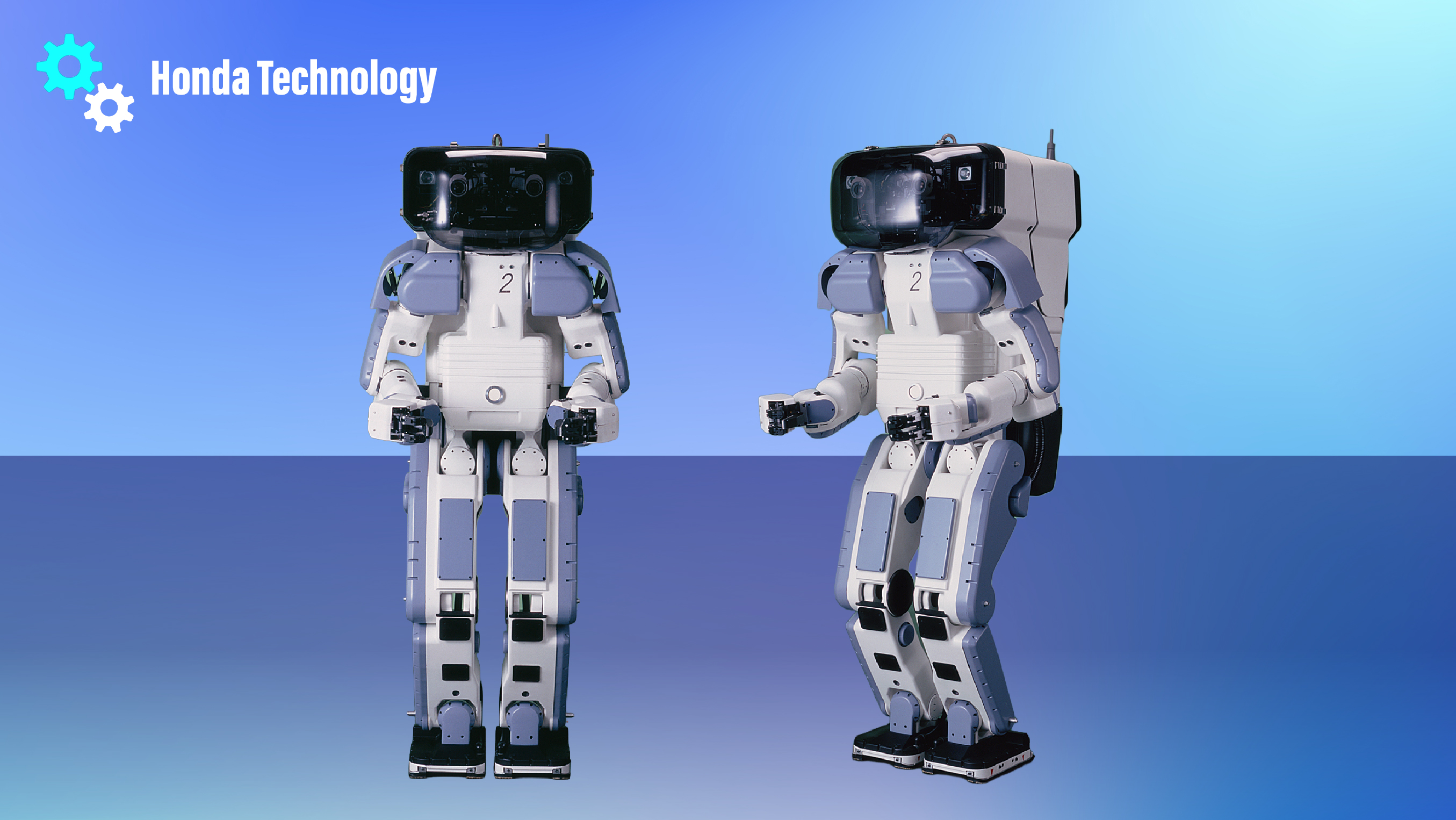
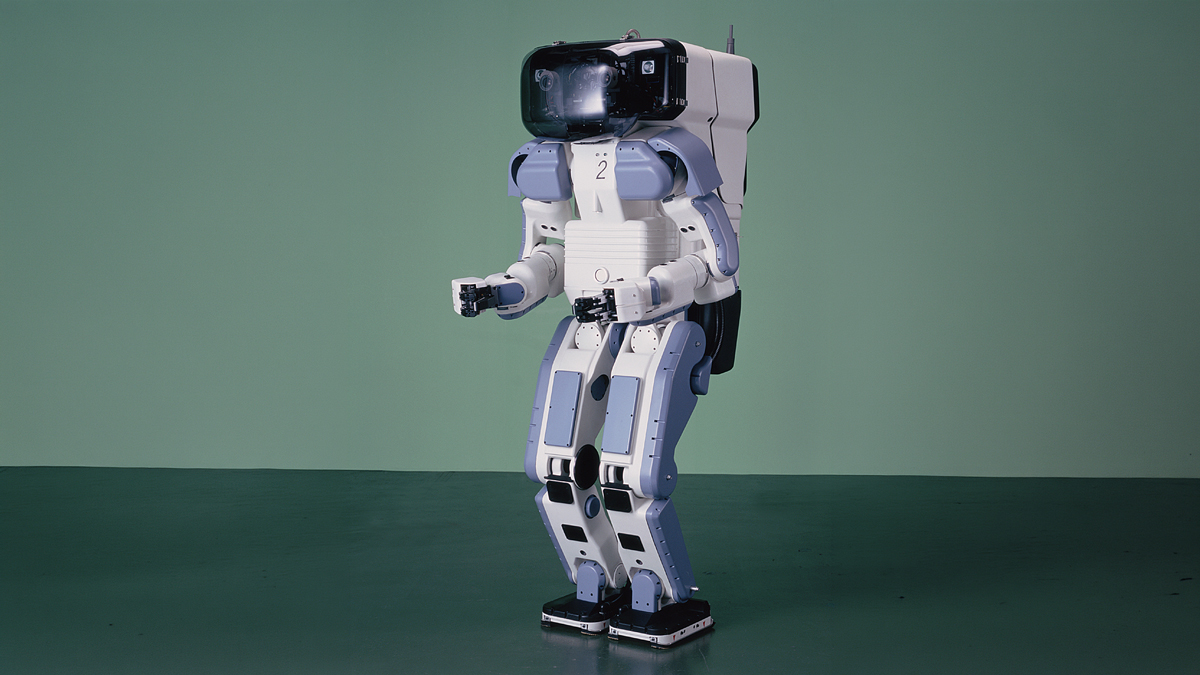
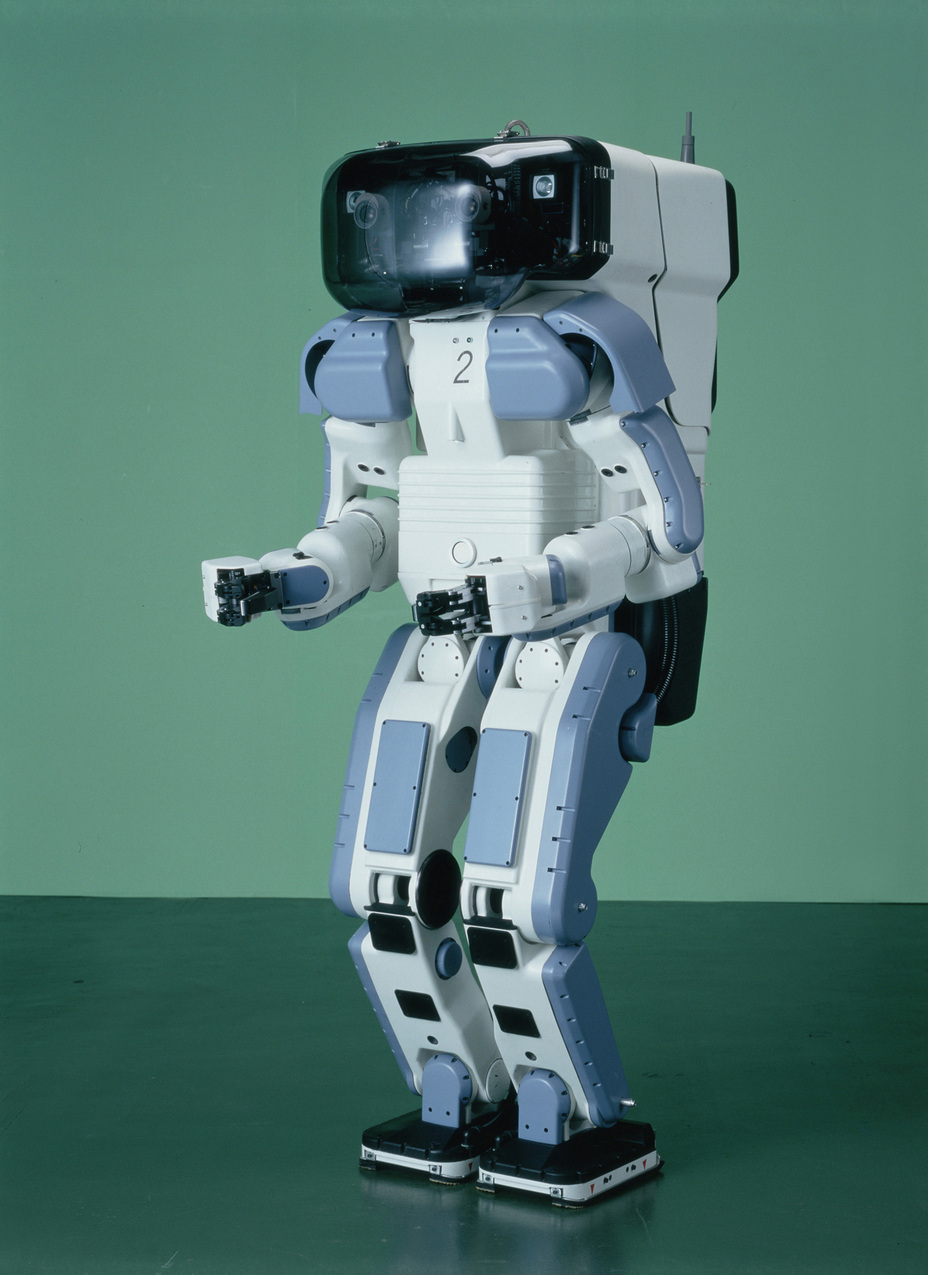
The Honda P2 is a historic humanoid robot research prototype developed by Honda Motor Co., Ltd. in Tokyo, Japan. Unveiled in 1996, it became the world's first fully autonomous bipedal humanoid, capable of walking, climbing stairs, and pushing a cart without any external cables. Standing 1.82 meters tall and weighing 210 kg, the P2 carried its own power source—a nickel-zinc battery—and an onboard computer for real-time control. With 30 degrees of freedom, it demonstrated dynamic balance and coordinated locomotion, setting the stage for all modern humanoid robots. Today, it is recognized with an IEEE Milestone and remains a key educational artifact in robotics history.
Specifications
Here are the full technical specifications.
| Spec | Value |
|---|---|
| Height | 1.82 m |
| Weight | 210 kg |
| Degrees of freedom | 30 |
| Battery life | 0.25 hours |
| Max speed | 2 km/h |
| Payload | Not specified |
| Price (new) | Not sold (research prototype) |
| Price (used range) | N/A |
Price & Value
New MSRP: Not sold (research prototype)
Used range: N/A
The Honda P2 was never intended for sale and has no retail price; it was a purely experimental prototype. Honda used the P2 as an internal research platform, and only a handful were ever built. As such, there is no second-hand market, and any transfer of a unit would occur privately between museums or research institutions. Its value today is historical and academic rather than financial; it cannot be evaluated like a commercial robot. Compared to the millions spent developing later humanoids like ASIMO or Atlas, the P2's engineering represented an invaluable leap in robotics, though no cost-per-unit figures were ever published. For those interested in acquiring a piece of robotics history, contact with Honda's corporate archives or affiliated museums would be the only possible avenue.
Who Is It For?
Best for: - Robotics historians and curators focused on the origins of autonomous humanoid locomotion - University engineering programs integrating major robotics milestones into their curriculum - Museum exhibits requiring an iconic pre-modern humanoid example
Not for: - Commercial or industrial users seeking a deployable humanoid (the P2 was never a product) - Researchers needing manipulation capabilities (payload rating was never published) - Enthusiasts wanting a functional, modern humanoid to purchase or lease (the robot is scarce, obsolete, and unsupported)
Alternatives & Comparison
In the mid-1990s, only a few research groups worldwide were attempting autonomous humanoid walking. The Honda P2 and Waseda University's WABIAN represent two distinctly different approaches from that era.
| Model | Price | Available | Key Difference |
|---|---|---|---|
| Waseda WABIAN | Not sold (research prototype) | no | Tethered design, no onboard power or wireless autonomy |
Verdict: The Honda P2 was a game-changing autonomous walker with onboard power and computing, earning its place as the first of its kind. While Waseda WABIAN contributed important bipedal research, it could not operate without a tether, making the P2 the unequivocal milestone for anyone studying the origins of practical humanoid robots. Today, both are purely historical artifacts, but the P2 stands alone as the first platform to prove that self-contained humanoid locomotion was possible.
Use Cases & Capabilities
Autonomous Bipedal Walking Research
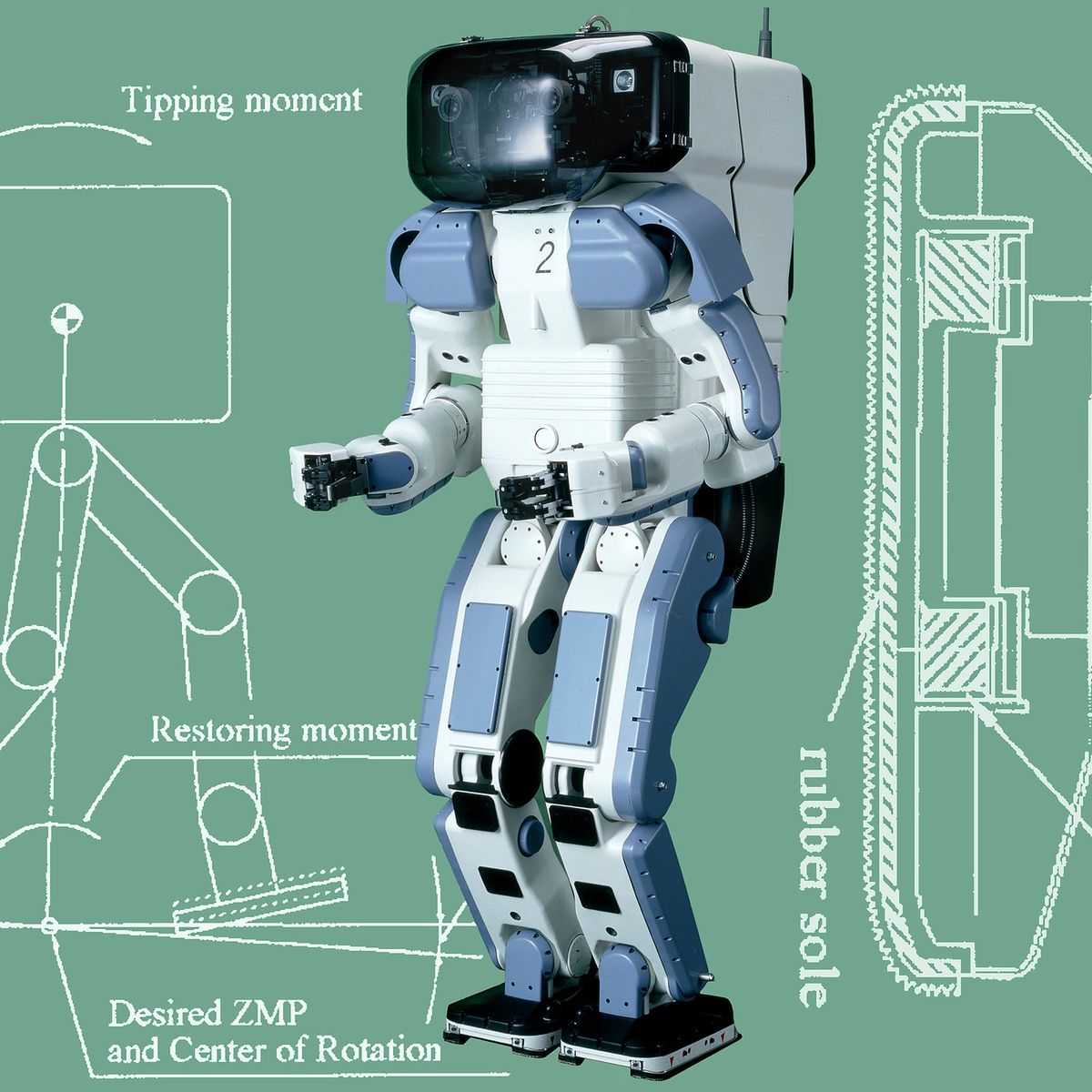
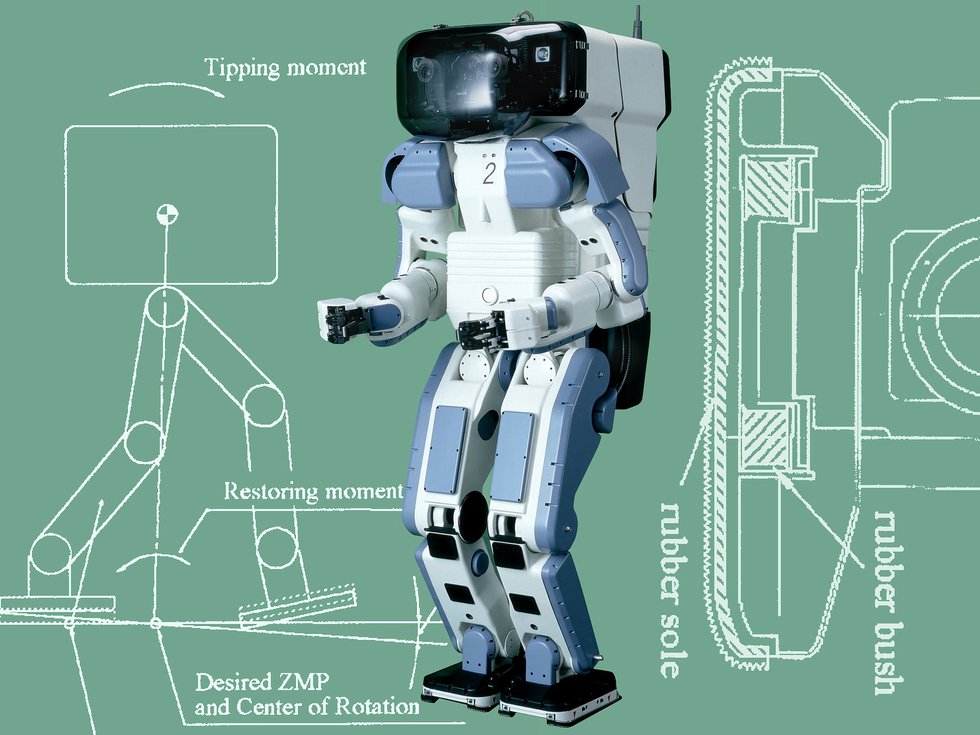
The P2 was built to demonstrate that a self-contained humanoid could walk, climb stairs, and push a cart without external support. It executed real-time gait control using onboard IMUs, foot force sensors, and joint angle sensors, processed by a proprietary computer. Honda collected vast data on dynamic balance and energy-efficient bipedal motion, informing later prototypes. Although its 2 km/h walking pace and 15-minute battery life seem modest now, in 1996 they represented a colossal step forward. The robot's ability to autonomously navigate a real-world environment without any tethers validated the concept of practical humanoid robots.
Humanoid Robotics Technology Platform
As Honda’s internal testbed, the P2 served as a proving ground for actuation, sensory integration, and battery technology in humanoids. Its 30-DOF body, driven by DC servo motors with harmonic drives, set a template for subsequent designs like the P3 and ASIMO. Engineers refined control algorithms using the P2's real-time OS, which managed balance and coordinated limb movements. Even though the P2 was never commercialized, its architectural choices influenced an entire generation of humanoid research platforms from universities to corporations.
Historical Education and Museum Display
Thanks to its IEEE Milestone designation, the P2 is a prime educational exhibit for robotics history. Museums and universities display original or replica units to illustrate the transition from tethered lab machines to autonomous walkers. It serves as an inspiring case study in engineering perseverance, showing how Honda overcame enormous technical challenges. For students of mechatronics and control systems, the P2 exemplifies early solutions to bipedal stability that are still relevant. Its legacy ensures it remains a touchstone in any discussion of humanoid robot evolution.
History & Background
Honda Motor Co., Ltd., founded in 1948 in Tokyo, Japan, began its humanoid robotics research in the late 1980s. The P series of prototypes started with the P1 in 1993, a tethered lower-body walker. In December 1996, Honda unveiled the P2, the world's first self-contained, autonomous bipedal humanoid robot. Standing 1.82 m tall and weighing 210 kg, it could walk, climb stairs, and push a cart without any external cables, thanks to onboard nickel-zinc batteries and a proprietary computer. The P2 directly led to the more refined P3 (1997) and the iconic ASIMO (2000), which became the public face of Honda's robotics. Production of the P2 and subsequent prototypes was discontinued as Honda moved to commercial ASIMO models. The P2 was recognized with an IEEE Milestone award for its historic contribution to autonomous walking.
Buying Used — What to Check
Verify authenticity and provenance Few original P2 units were built; confirm with Honda or reputable institutions that the robot is an original prototype and not a replica.
Inspect battery and power systems The nickel-zinc battery pack is obsolete and may need replacement or safe removal if intended for static display.
Assess mechanical condition After decades, the DC motors, harmonic drives, and magnesium frame may have degraded; a full inspection is necessary before any attempted operation.