Justin (znany jako "Rollin' Justin" i "Agile Justin") to zręczny, dwuramienny robot humanoidalny opracowany przez Niemieckie Centrum Lotnictwa i Kosmonautyki (DLR).
💰Cena
$400,000
📅Rok powstania
2008
🌍Pochodzenie
DE
📏Wysokość
190 cm
⚖️Waga
150 kg
🦾Stopnie swobody
41
🏃Prędkość maksymalna
3.6 km/h
📦Udźwig
15 kg
🔋Bateria
Not applicable
🛒Dostępność
Dostępny
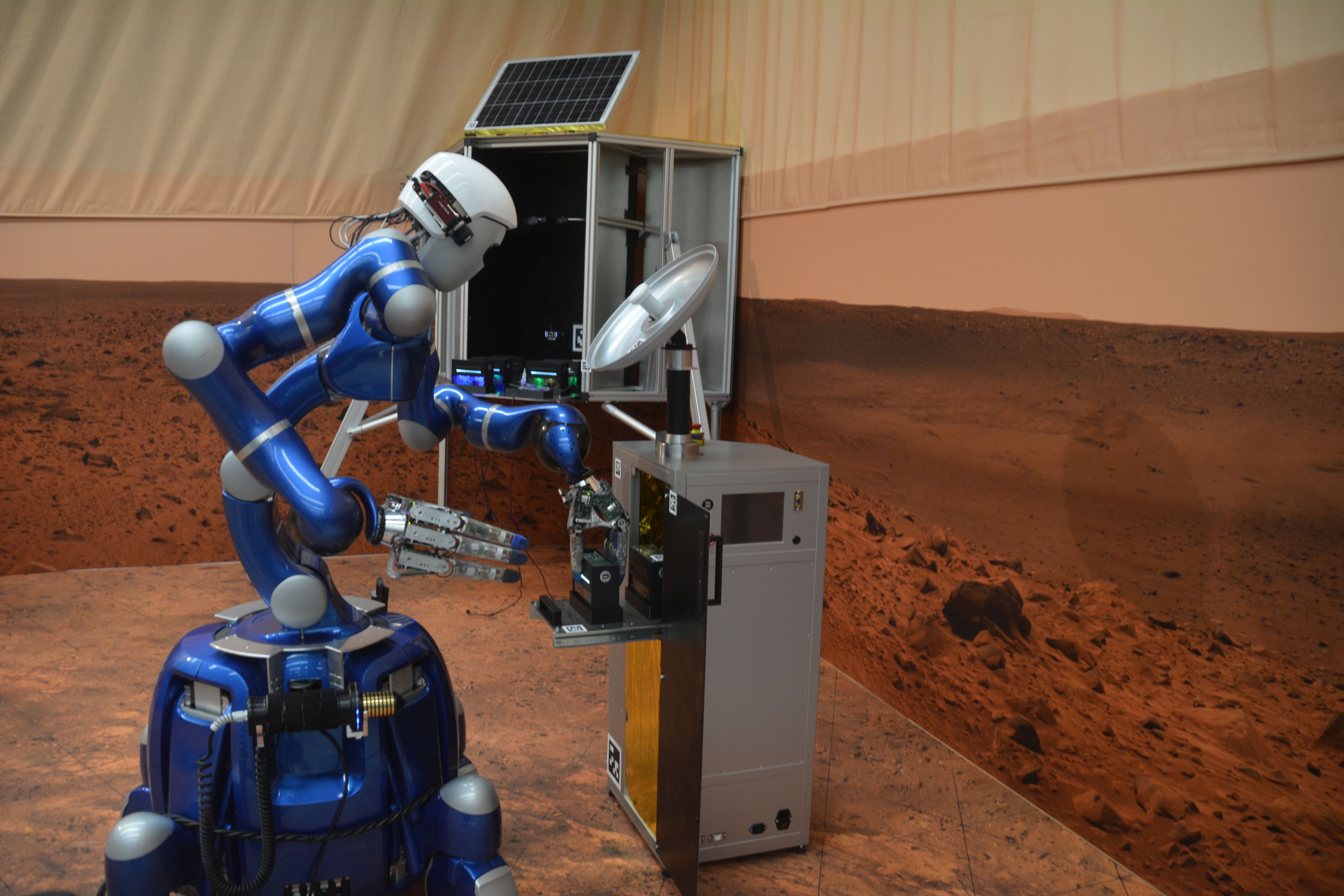
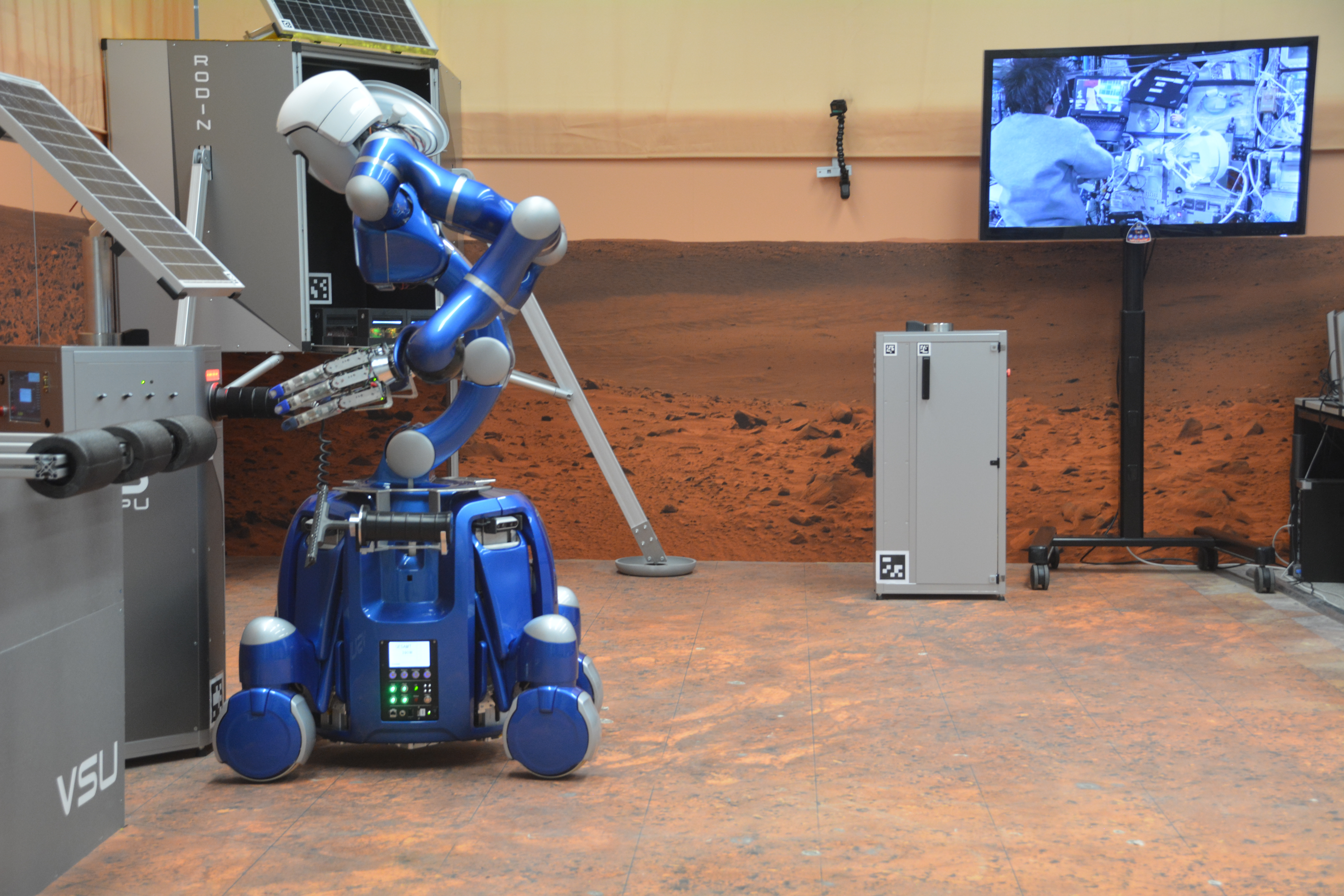
Justin (znany również jako "Rollin' Justin" i "Agile Justin") to zręczny, dwuramienny robot humanoidalny opracowany przez Niemieckie Centrum Lotnictwa i Kosmonautyki (DLR) — a dokładnie jego Centrum Robotyki i Mechatroniki. Justin nie jest robotem kroczącym: to bardzo zaawansowana humanoidalna górna część ciała (tułów, głowa oraz dwa ramiona z wyrafinowanymi dłońmi) zamontowana na kołowej, rozkładanej podstawie. Justin został zbudowany do zaawansowanych badań nad zręczną manipulacją i jest wyjątkowo sprawny — potrafi na przykład łapać rzucane w jego kierunku piłki, obserwując i przewidując ich trajektorię w ułamku sekundy.
Dostępność
Justin to robot badawczy, opracowany i używany wewnętrznie przez DLR. Nie jest produktem komercyjnym — nie ma ceny ani ścieżki zakupu. DLR wykorzystuje Justina do przesuwania granic zręcznej manipulacji, koordynacji dwuręcznej i telerobotyki, w tym badań nad telerobotyką kosmiczną (DLR badało możliwość zdalnego sterowania robotami takimi jak Justin z Międzynarodowej Stacji Kosmicznej przez astronautów).
Pełna specyfikacja
Aspekt
Szczegóły
Producent
Niemieckie Centrum Lotnictwa i Kosmonautyki (DLR), Centrum Robotyki i Mechatroniki
Typ
Dwuramienna, zręczna humanoidalna górna część ciała na kołowej, rozkładanej podstawie ("Rollin' Justin")
Dłonie
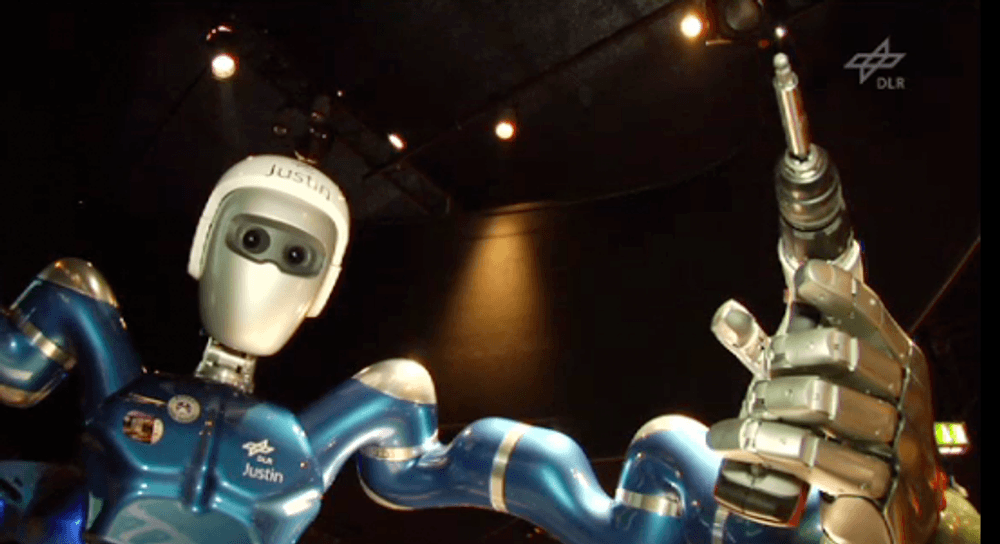
Bardzo zaawansowane, zręczne dłonie — bardziej wyrafinowane niż w DLR TORO, zaprojektowane do interakcji z szeroką gamą obiektów
Wyjątkowa umiejętność
Łapanie rzucanych piłek poprzez obserwację i przewidywanie ich trajektorii w czasie rzeczywistym
Główny obszar badań
Zręczna i dwuręczna manipulacja; telerobotyka, w tym kosmiczna
Podstawa technologiczna
Oparty na lekkiej, sterowanej momentem obrotowym robotyce DLR (ta sama technologia co ramiona KUKA-DLR Lightweight Robot)
Znaczenie
Justin to jeden z najbardziej zręcznych humanoidalnych robotów badawczych, jakie kiedykolwiek zbudowano — pokaz światowej klasy prac DLR w dziedzinie lekkiej, sterowanej momentem obrotowym i wrażliwej na siłę robotyki. Jego koordynacja dwuręczna i zaawansowane dłonie czynią go wzorcową platformą do badań nad manipulacją, a jego zastosowanie w eksperymentach telerobotycznych (w tym zdalne sterowanie z ISS) bezpośrednio łączy się z misją robotyki kosmicznej DLR. Justin pokazuje, co jest możliwe, gdy priorytetem projektowym jest zręczność, a nie lokomocja.
Justin a podobne roboty
Justin vs DLR TORO: Ta sama instytucja — TORO to kroczący humanoid DLR; Justin to zręczny humanoid z kołową podstawą i bardziej zaawansowanymi dłońmi.
Justin vs Astribot S1: Oba stawiają zręczną manipulację ponad lokomocją dwunożną.
Justin vs NASA Robonaut 2: Oba to zręczne humanoidy górnej części ciała zaprojektowane do zaawansowanej manipulacji, w tym w kontekście kosmicznym.
DLR Justin is not sold commercially and has no official price. It is a bespoke research platform built in-house by the German Aerospace Center. Any attempt to purchase would require a direct collaboration agreement with DLR.
Justin excels at dexterous bimanual manipulation, including catching thrown objects, precise assembly tasks, and teleoperation with haptic feedback. Its 41 torque-controlled joints and four-fingered hands allow it to handle fragile objects gently or apply precise forces, but it cannot walk—only roll on its omnidirectional base.
No. DLR Justin is strictly a research platform and has never been offered for sale. Researchers outside DLR can sometimes access the technology through joint projects or by replicating parts of its design using published papers, but there is no commercial production.
The PR2 is also a research platform but it is a mobile base with two arms and no humanoid shape; it costs about $400,000 (originally). Justin is taller, has a humanoid upper body, more advanced hands with tactile sensing, and torque control in every joint. However, PR2 has a strong open-source software ecosystem and was sold to universities, making it easier to acquire and modify.
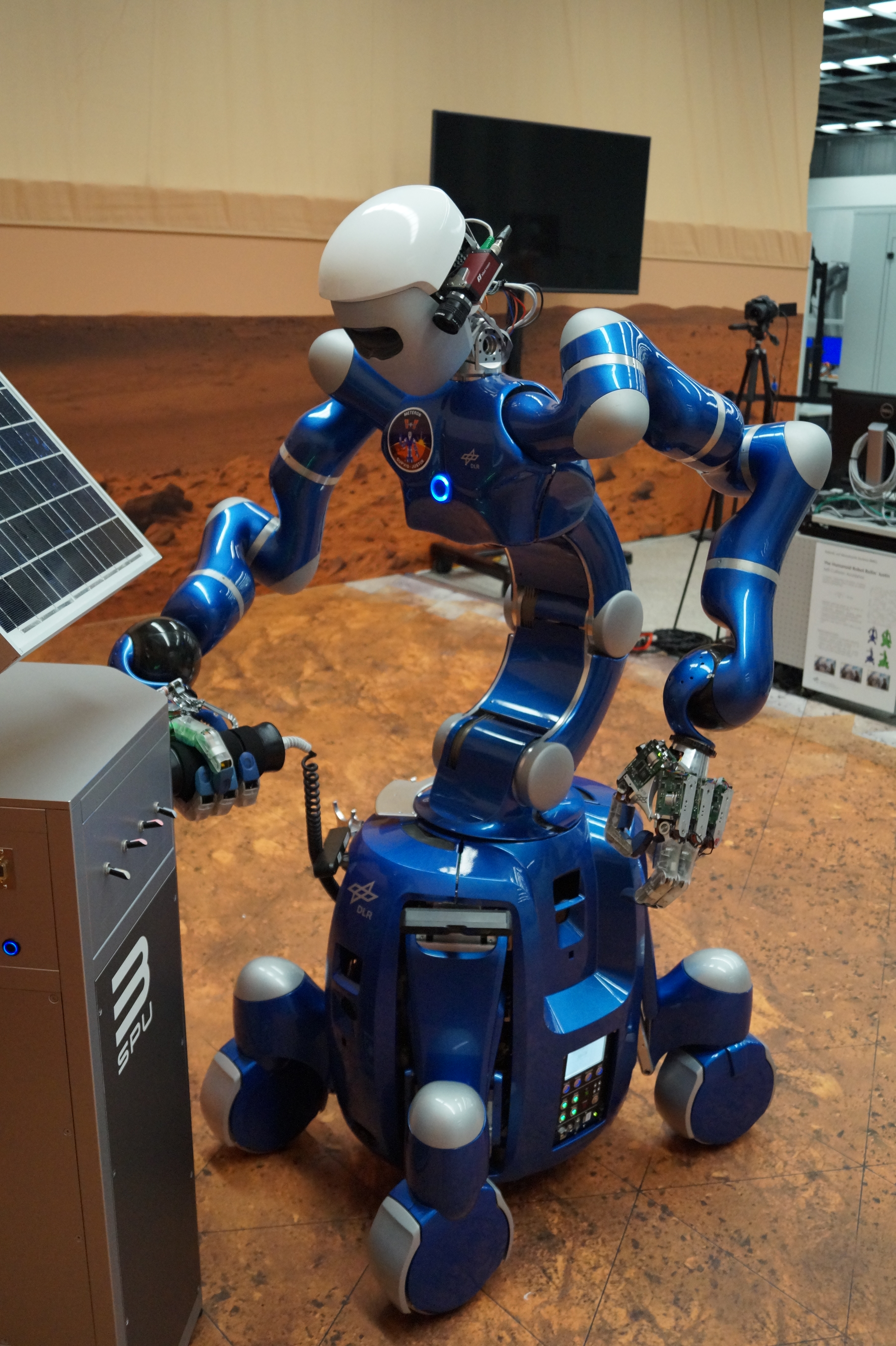
Justin stands 190 cm tall, weighs 150 kg, and has 41 degrees of freedom: 7 per arm, 12 per hand (four-fingered), and a 3-DOF movable torso. It moves at up to 3.6 km/h on its wheeled base, lifts approximately 15 kg per arm, and is powered via an external tether.
The DLR Justin was developed by the Institute of Robotics and Mechatronics at the German Aerospace Center (DLR) in Oberpfaffenhofen, Germany. DLR is a government-funded research organization known for space, aeronautics, and robotics research.
Justin does not have a battery. It relies on an external power supply via a tether, so runtime is unlimited as long as it is connected. This was an intentional design choice to focus on manipulation research without weight or endurance constraints.
Justin is used exclusively in academic and government research settings, particularly for advanced manipulation studies, space robotics programmes, and human-robot interaction labs. It has not been deployed in any commercial industry due to its laboratory nature.
No, Justin does not have legs. It is a wheeled humanoid that stands on an omnidirectional base, capable of moving sideways and turning. Its mobility is limited to smooth, flat indoor floors.
Justin is equipped with stereo cameras, laser scanners, torque sensors in every joint, six-axis force/torque sensors at each wrist, and tactile sensors on the fingertips. These sensors provide rich feedback for force control and environmental perception.