DLR TORO – Specyfikacja i historia — Specs, Price & Where to Buy (2026)
TORO (TOrque-controlled humanoid RObot) – dwunożny robot humanoidalny DLR z kontrolą momentu obrotowego, opracowany na bazie DLR-Biped. Platforma badawcza do chodu i manipulacji.
💰Cena
$200,000 – $400,000
📅Rok powstania
2009
🌍Pochodzenie
DE
📏Wysokość
174 cm
⚖️Waga
55 kg
🦾Stopnie swobody
39
🏃Prędkość maksymalna
0.7 km/h
📦Udźwig
5 kg
🔋Bateria
Tethered
🛒Dostępność
Niedostępny
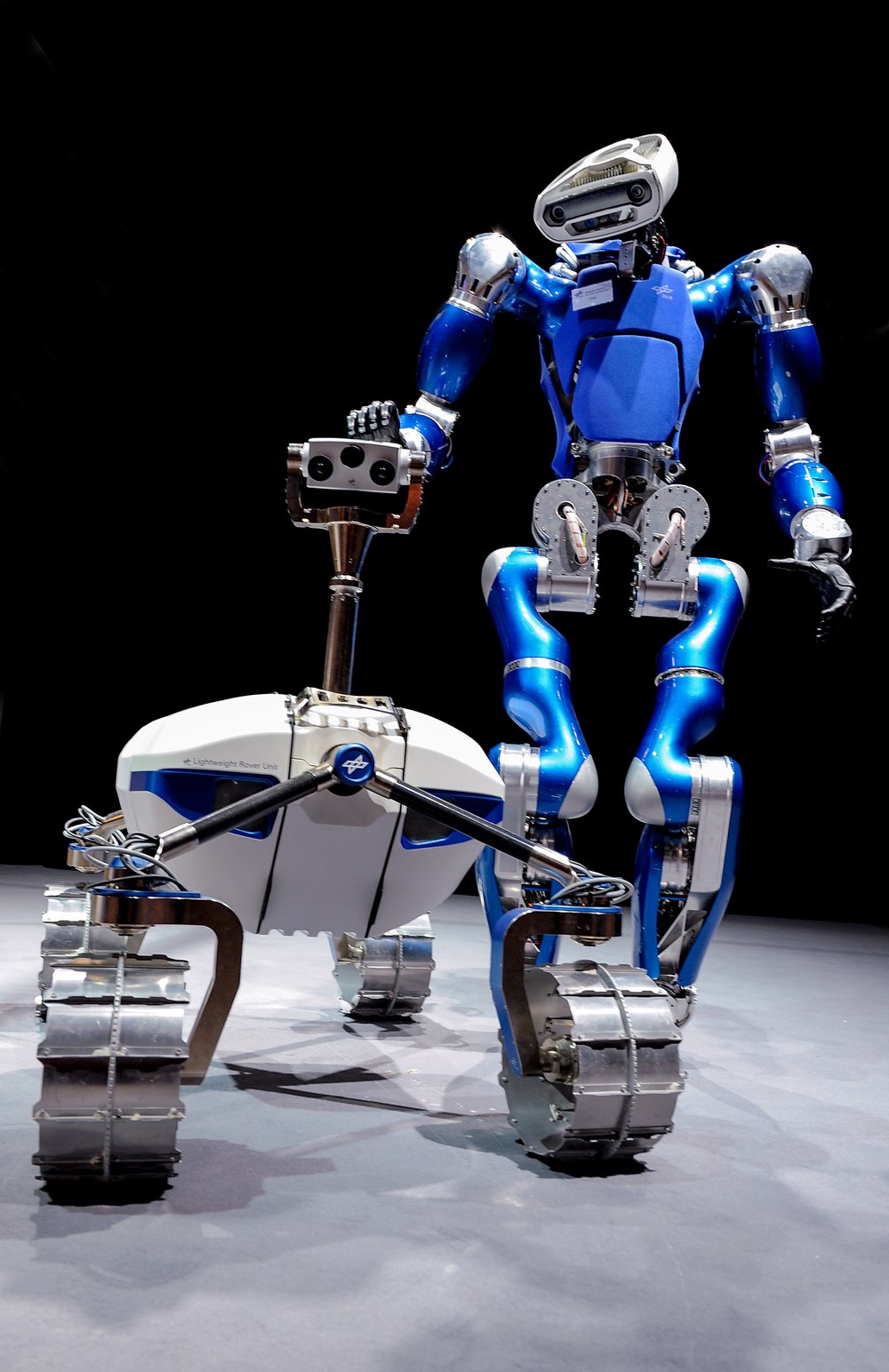
TORO (TOrque-controlled humanoid RObot) to dwunożny robot humanoidalny opracowany przez Niemieckie Centrum Lotnictwa i Kosmonautyki (DLR). TORO wywodzi się z projektu DLR-Biped – pary robotycznych nóg, które po raz pierwszy chodziły w 2009 roku – do których później dodano całkowicie nowy korpus i przemianowano na TORO. Jako dwunożny robot z kontrolą momentu obrotowego, TORO jest platformą badawczą do studiowania chodu dwunożnego oraz łączenia lokomocji z manipulacją (tzw. loco-manipulation). Jego nazwa oznacza również „byka” po hiszpańsku.
Dostępność
TORO to robot badawczy, opracowany i używany wewnętrznie przez DLR – nie jest produktem komercyjnym. Nie ma ceny ani ścieżki zakupu. DLR używa TORO do badania zachowania całego ciała dwunożnego robota z kontrolą momentu obrotowego – robotów, które wykonują sekwencje ruchów „z przewidywaniem i płynnością”.
Pełna specyfikacja
Parametr
Wartość
Producent
German Aerospace Center (DLR), Robotics and Mechatronics Center
Pochodzenie
Wyewoluował z DLR-Biped (nogi po raz pierwszy chodziły w 2009); dodano korpus, tworząc TORO
Typ
Dwunożny humanoid z kontrolą momentu obrotowego
Silniki
25
Napęd
Kontrola momentu obrotowego; obsługuje tryby sterowania położeniem i momentem; napędy ramion oparte na KUKA-DLR Lightweight Robot (LWR)
Udźwig
~10 kg
Czujniki
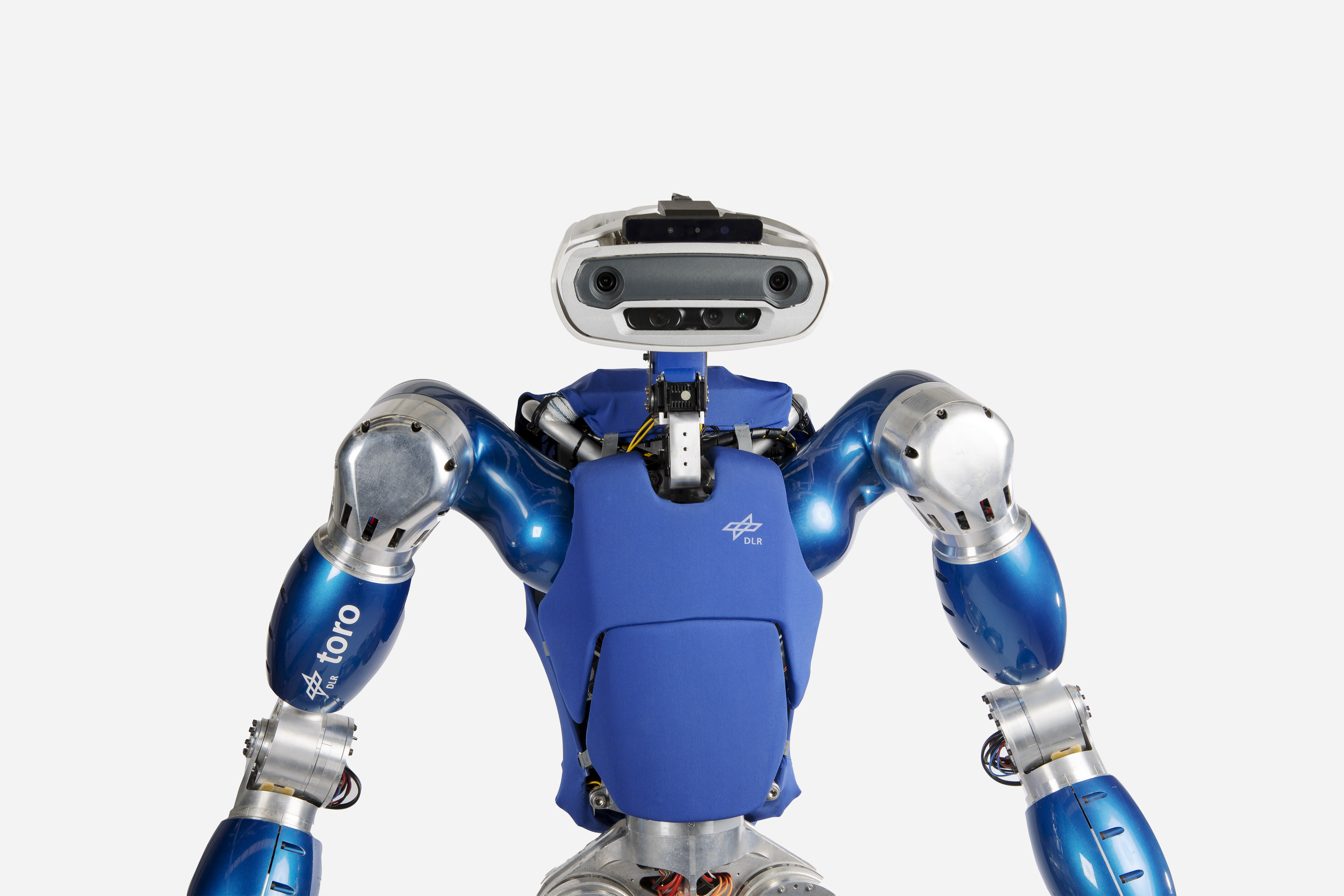
Czujniki położenia i momentu w każdym stawie; 6-DOF czujnik siły/momentu w każdej kostce; IMU na tułowiu i głowie; kamera głębi, kamery stereoskopowe oraz Intel RealSense w głowie
Samodzielność
Samodzielny
Znaczenie
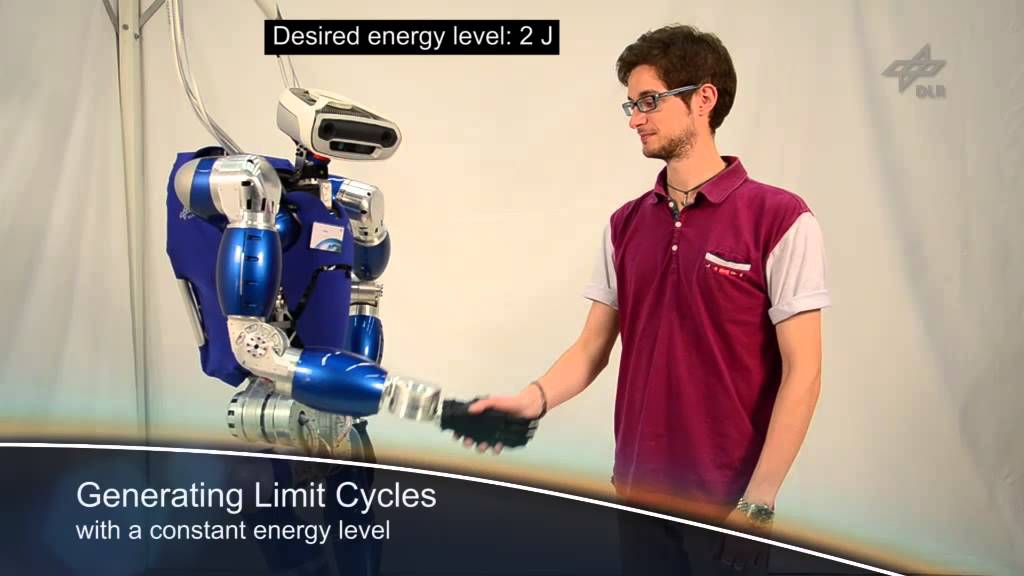
TORO reprezentuje zastosowanie przez DLR jego słynnej wiedzy z zakresu robotyki z kontrolą momentu i czułością na siłę do problemu humanoidalnego dwunożnego. Kontrola momentu w całym ciele pozwala TORO chodzić i balansować elastycznie oraz łączyć chodzenie z manipulacją – kierunek badań stający się coraz bardziej kluczowy w całej dziedzinie humanoidów. Zbudowany na sprawdzonych nogach DLR-Biped i technologii lekkich ramion robotycznych DLR, TORO jest szanowaną europejską platformą badawczą do sterowania całym ciałem humanoida.
TORO a podobne roboty
TORO vs DLR Justin: Ta sama instytucja – TORO to robot dwunożny; Justin to humanoid na kołach do zręcznej manipulacji.
TORO vs PAL TALOS: Oba to europejskie humanoidy badawcze z kontrolą momentu; TALOS jest sprzedawany instytucjom, TORO jest wewnętrzny w DLR.
TORO vs Agility Cassie: Oba to platformy badawcze do lokomocji dwunożnej z kontrolą momentu/siły; TORO to pełny humanoid, Cassie to tylko nogi.
TORO has no commercial price because it is a research platform built for internal DLR use only. DLR may collaborate with external institutes but does not sell units. If you were to replicate the hardware, component costs (custom torque-controlled joints, sensors, compute) would likely exceed $200,000.
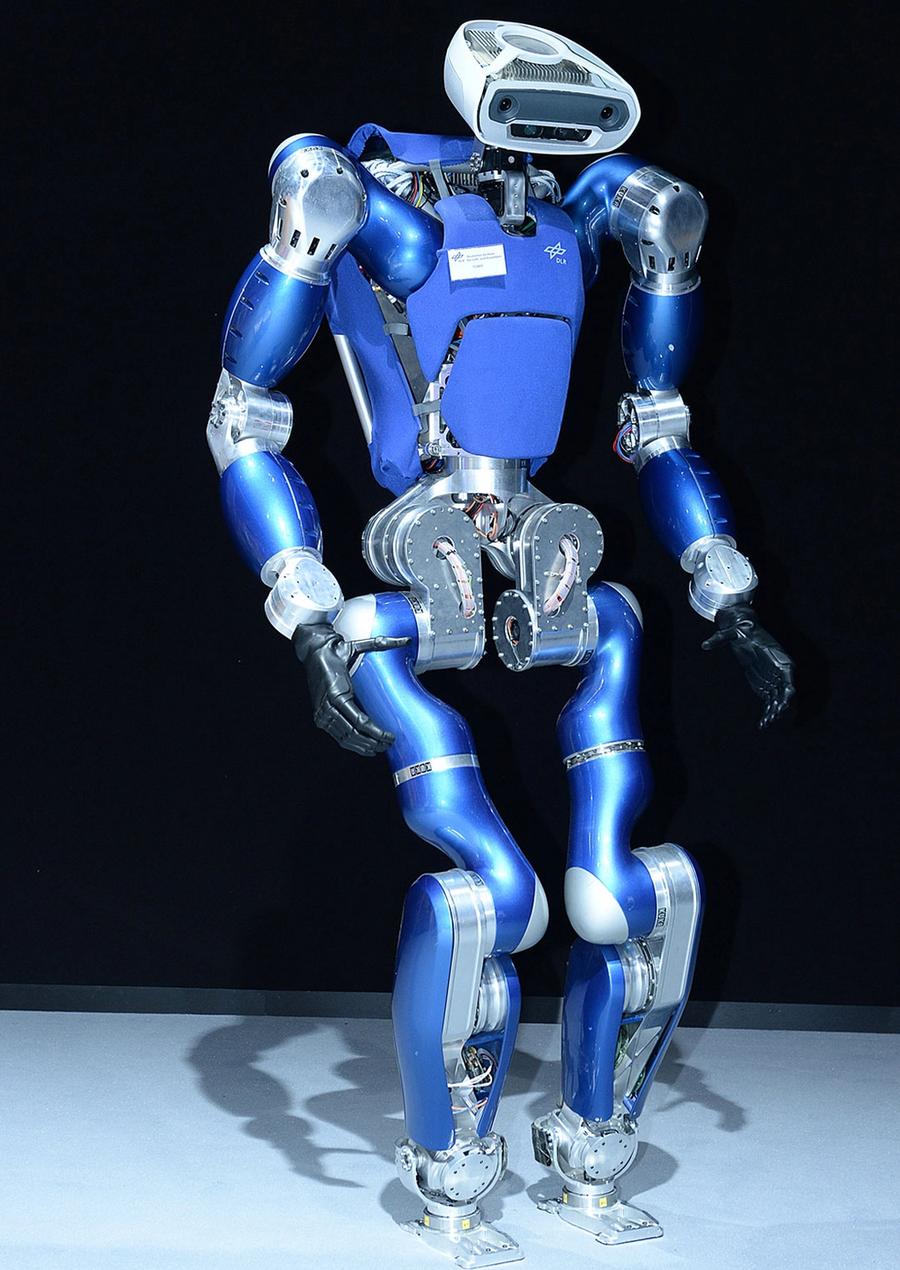
TORO is a 39-DOF bipedal robot capable of compliant walking, balancing against pushes, and performing simple manipulation while standing or stepping. It uses torque control for smooth, safe motions, but its walking speed is limited to about 0.72 km/h and it relies on an external power tether.
No, TORO is not commercially available. It is a research-only platform operated by the German Aerospace Center (DLR). There is no product page, order form, or public price. Interested labs should contact DLR directly about research collaborations.
Both are non-commercial humanoids, but Atlas uses hydraulic actuation for explosive agility and outdoor capability, while TORO relies on electric series-elastic joints for precise, compliant torque control at every axis. TORO is better suited for lab-based torque-control research, Atlas for high-dynamics real-world demonstrations.
Height: 1.74 m, weight: 55 kg, 39 degrees of freedom (12 legs, 12 arms, 2 torso, 1 head), arm payload: ~5 kg, max walking speed ~0.72 km/h, tethered 48 V power (no onboard battery), running Linux with Xenomai real-time framework.
The German Aerospace Center (DLR), specifically the Institute of Robotics and Mechatronics in Oberpfaffenhofen, Germany, developed and operates TORO. DLR has a long history in lightweight torque-controlled arms and bipeds dating back to the early 2000s.
TORO has no battery; it runs on a tethered external 48 V DC supply. Battery life is therefore limited only by the power grid. There is no onboard energy storage, making it unsuitable for untethered operation.
TORO is used exclusively in academic and government research settings, primarily in humanoid robotics labs studying bipedal walking, whole-body control, and compliant manipulation. It has no deployments in commercial industries.
While DLR has demonstrated TORO stepping on uneven surfaces in lab mock-ups, its tether, sensor suite (stereo camera, RGB-D, rotating laser scanner), and modest push-recovery robustness are not designed for unconstrained outdoor navigation. It remains a controlled indoor research platform.
TORO is equipped with an IMU, joint torque and position sensors, 6-axis force/torque sensors at each foot, a stereo camera, an RGB-D sensor (e.g., ASUS Xtion), and a rotating laser scanner (e.g., Hokuyo UTM-30LX) for environment perception.