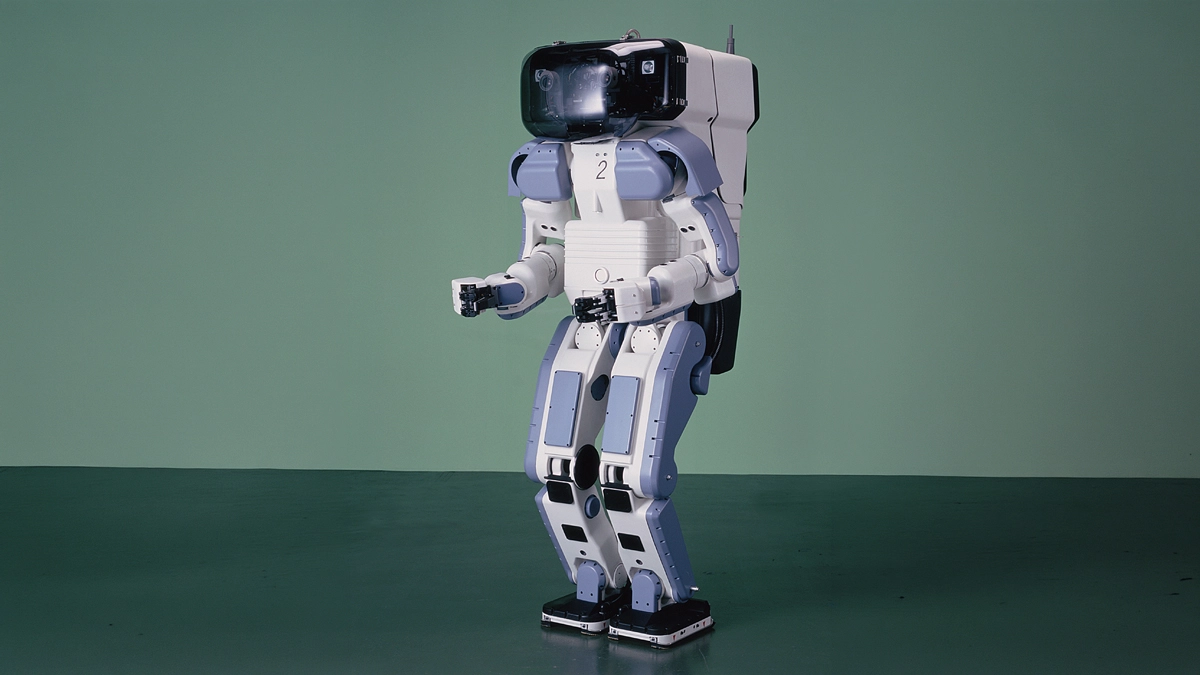
Honda P3 – trzeci i ostatni robot z serii P, pierwszy w pełni autonomiczny dwunożny humanoid o ludzkich rozmiarach.
💰Cena
Undisclosed
📅Rok powstania
1997
🌍Pochodzenie
JP
📏Wysokość
160 cm
⚖️Waga
130 kg
🦾Stopnie swobody
28
🏃Prędkość maksymalna
2 km/h
🔋Bateria
0.42 hours
🛒Dostępność
Niedostępny
Honda P3 („Prototyp 3”), ukończony we wrześniu 1997 roku, był trzecim i ostatnim robotem w serii P Hondy oraz pierwszym całkowicie niezależnym, w pełni autonomicznym dwunożnym humanoidem o znacznie bardziej kompaktowej, zbliżonej do człowieka formie. Dzięki zmianie materiałów i zastosowaniu rozproszonego systemu sterowania Honda osiągnęła znaczną miniaturyzację i redukcję masy w porównaniu z P2 – przybliżając robota do rozmiarów praktycznych w środowisku ludzkim. P3 był bezpośrednim poprzednikiem ASIMO.
Dostępność
P3 był prototypem badawczym, a nie produktem komercyjnym. Sterowano go ze stanowiska roboczego (ASIMO dodało później możliwość obsługi za pomocą przenośnego kontrolera). Stanowił ostatni krok przed ASIMO w programie humanoidów Hondy.
Pełne dane techniczne
Parametr
Wartość
Rok
wrzesień 1997
Wysokość
~1,60 m
Masa
~130 kg
Sterowanie
Rozproszony system sterowania; obsługa ze stanowiska roboczego
Kluczowy postęp
Miniaturyzacja i redukcja masy dzięki zmienionym materiałom i rozproszonemu sterowaniu
Możliwości
W pełni autonomiczne, niezależne chodzenie dwunożne
Znaczenie
P3 przybliżył humanoida Hondy do rozmiarów i masy umożliwiających współdzielenie przestrzeni z człowiekiem. Rozproszona architektura sterowania i ulepszenia materiałowe były krokami inżynieryjnymi, które umożliwiły powstanie ASIMO – jeszcze mniejszego (120–130 cm). P3 jest także znany jako podstawa dla HRP-1, wariantu powstałego w ramach japońskiego projektu Humanoid Robotics Project.
P3 a pokrewne roboty
P3 a Honda P2: Ta sama zdolność autonomicznego chodzenia, ale P3 jest wyraźnie mniejszy i lżejszy – celowy krok w kierunku praktyczności w skali człowieka.
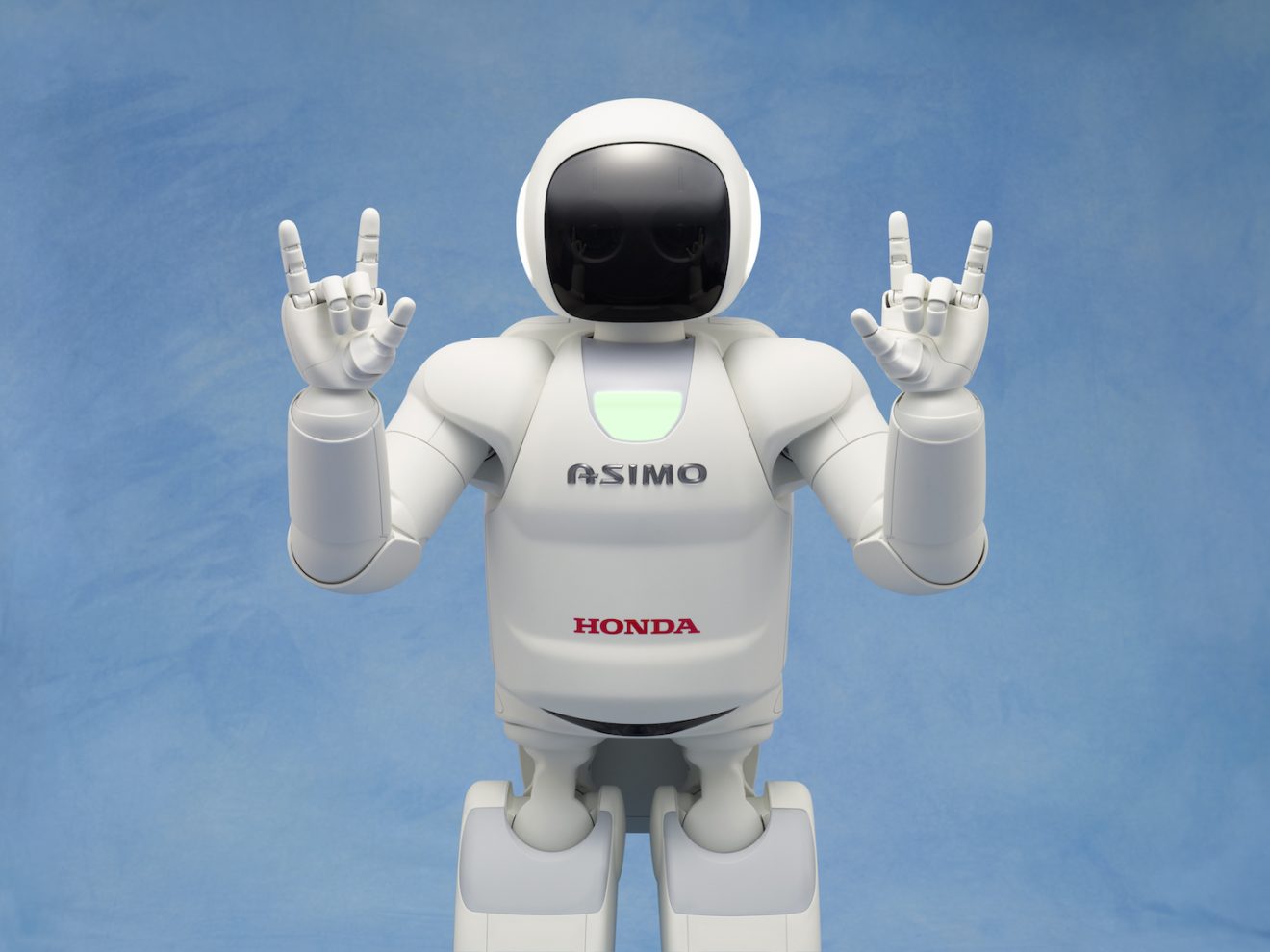
P3 a Honda ASIMO: ASIMO jest bezpośrednim następcą – jeszcze mniejszy, z technologią „i-WALK”, rozpoznawaniem twarzy/głosu i możliwością biegania.
P3 a HRP-1: HRP-1, z japońskiego projektu Humanoid Robotics Project, był wariantem opartym na P3.
The Honda P3 was never sold commercially; it was a research prototype with no retail price. No new or used units are available on the open market.
It could walk dynamically at up to 2 km/h, climb stairs, recover from pushes, and perform simple arm gestures. It used stereo cameras and foot sensors for balance but lacked advanced manipulation or speech.
No. The P3 is a discontinued research prototype. It was never commercially released, and no units are currently for sale.
The P3 is ASIMO’s direct predecessor. It was taller (1.60 m vs. 1.30 m), heavier (130 kg vs. ~50 kg), and slower (2 km/h vs. up to 9 km/h). ASIMO added refined walking, running, and social interaction capabilities.
Height: ~1.60 m, weight: ~130 kg, degrees of freedom: 28, battery life: 0.42 hours (25 min), max speed: 2 km/h. Payload was not specified.
Honda Motor Co., headquartered in Tokyo, Japan. The P3 was developed at Honda’s Wako Research Center as part of a secret humanoid robotics program that started in the 1980s.
Approximately 0.42 hours, or about 25 minutes of continuous operation. The battery was internal and non-swappable during operation.
None commercially. It was used exclusively for academic and corporate robotics research, primarily in bipedal locomotion, at facilities like Honda’s labs and AIST in Japan.
Modern humanoids like Unitree H1 or Tesla Optimus offer far greater speed, dexterity, and AI integration at prices up to $150,000 or more. The P3 is obsolete by today’s standards but foundational.
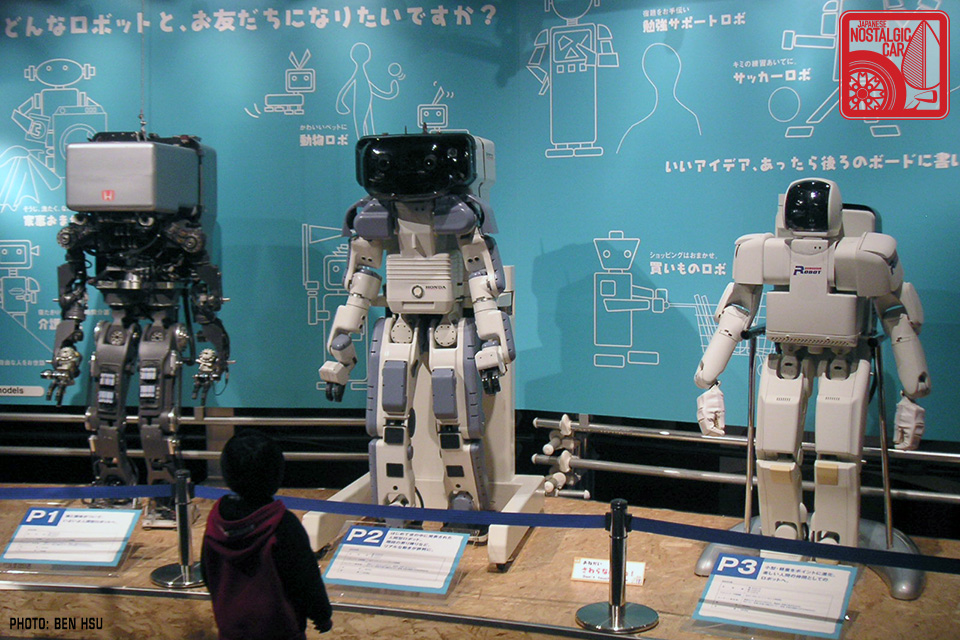
The P3 was unveiled in 1997 as the third prototype in Honda’s P-series, following the P1 (1993) and P2 (1996). It directly preceded the ASIMO program launched in 2000.