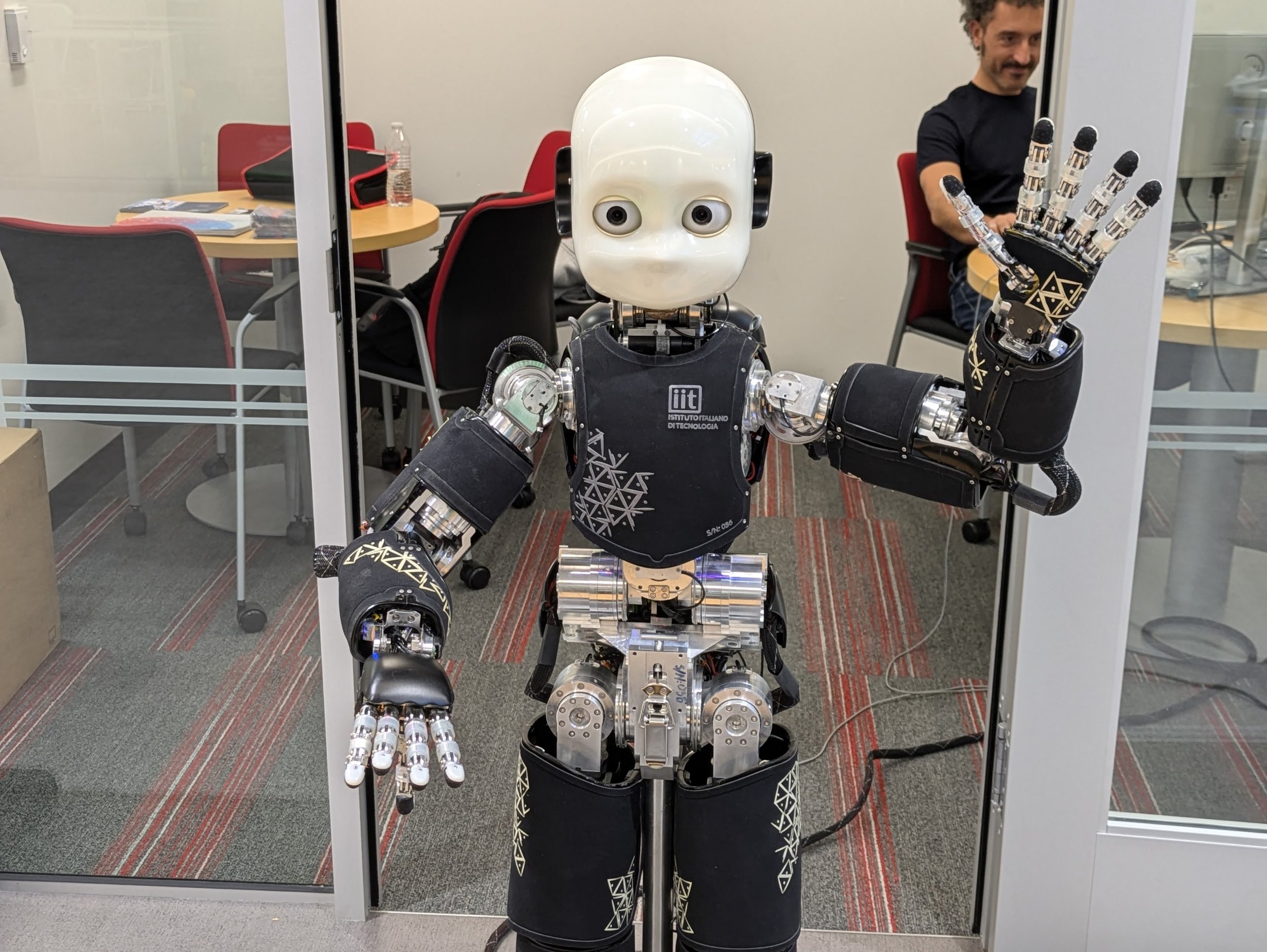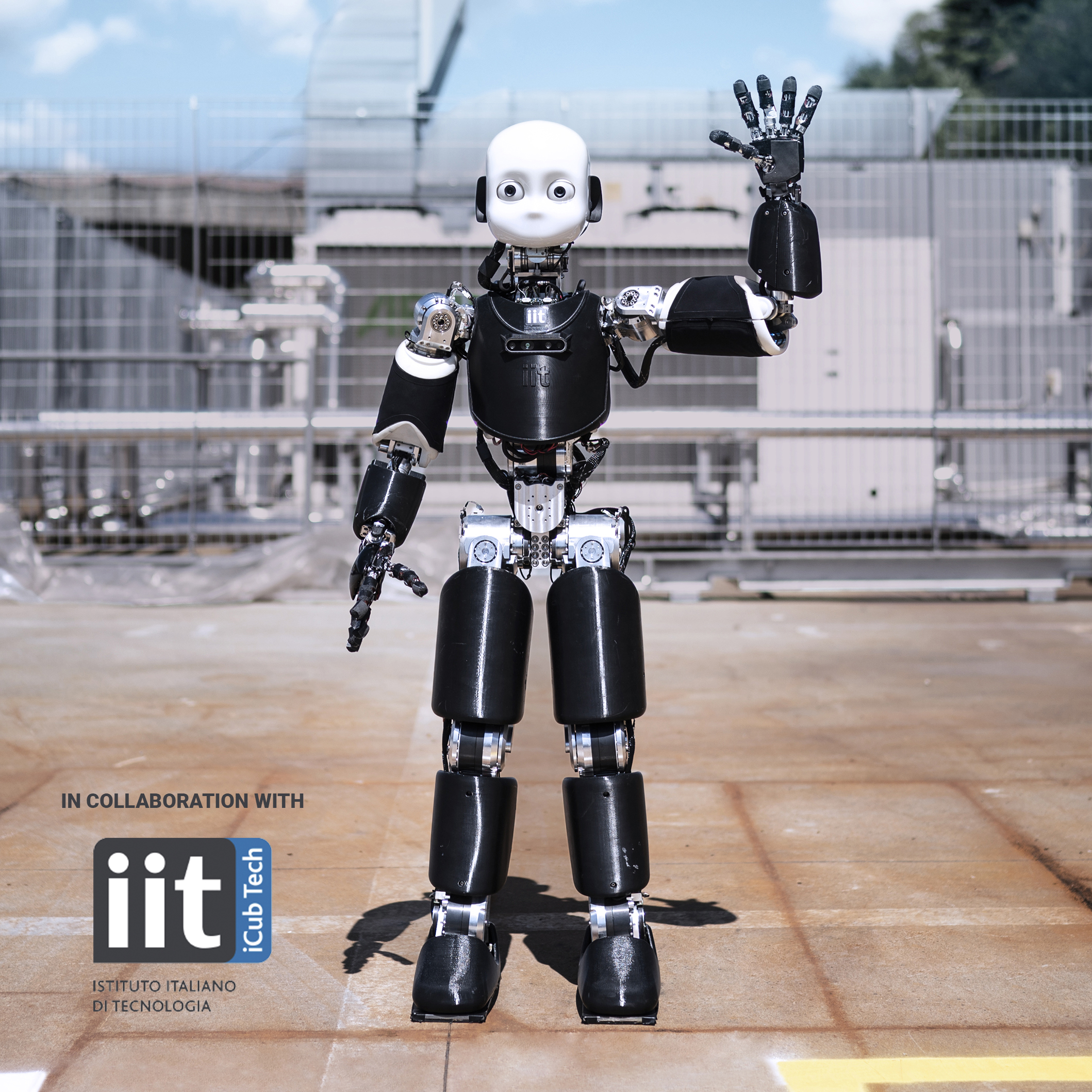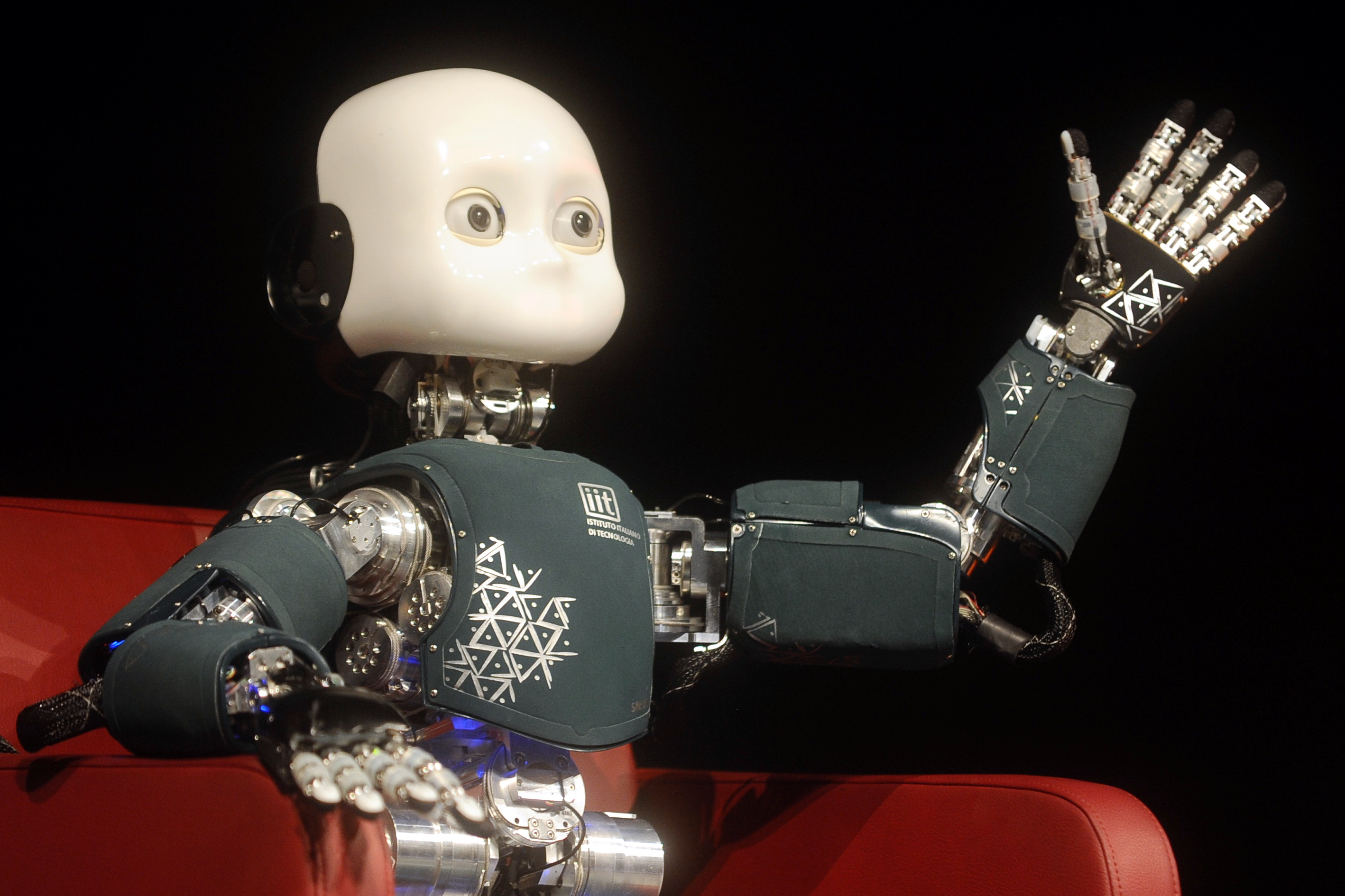
iCub to humanoidalny robot wielkości dziecka, o otwartym kodzie źródłowym, opracowany przez Włoski Instytut Technologii (IIT) w Genui. Stworzony pierwotnie w ramach finansowanego przez UE konsorcjum RobotCub, skupiającego kilka europejskich uniwersytetów – prace rozpoczęto w 2004 roku, a pierwszą wersję wydano około 2008 roku – iCub zaprojektowano jako platformę testową do badań nad ludzkim poznaniem, sztuczną inteligencją i uczeniem się przez ucieleśnienie. Stał się jedną z najbardziej wpływowych platform badawczych na świecie, a jego egzemplarze trafiły do instytutów badawczych na całym globie. Obecnie robot rozwijany jest jako iCub3.
Przedział cenowy
iCub jest dostępny dla instytucji badawczych, dostarczany przez IIT. Jest wyceniany jako instrument badawczy; dla orientacji – IIT podaje, że sama głowa iCuba (konfigurowalny, samodzielny zestaw robotyczny) kosztuje około 40 000 €, co daje wyobrażenie o skali – kompletny iCub to znaczny wydatek inwestycyjny. Wyceny są realizowane bezpośrednio przez IIT.
| Podstawa | Kwota |
|---|---|
| Głowa iCuba (samodzielna) | ~40 000 € (~46 000 $ według kursu z maja 2025, orientacyjnie) |
| Kompletny iCub | Znaczny wydatek inwestycyjny; wycena na zapytanie przez IIT |
| Rynek | Instytucje badawcze na całym świecie |
Pełna specyfikacja
| Parametr | Wartość |
|---|---|
| Producent | Włoski Instytut Technologii (IIT), Genua; pierwotnie konsorcjum RobotCub |
| Typ | Humanoidalny robot badawczy wielkości dziecka, o otwartym kodzie źródłowym |
| Wysokość | ~1,1 m |
| Masa | ~33 kg |
| Liczba stopni swobody | ~53 (w tym ~9 DOF na rękę; ~6 DOF w głowie) |
| Silniki | ~53 – silniki bezszczotkowe 150 W dla dużych stawów; silniki prądu stałego dla dłoni i małych stawów |
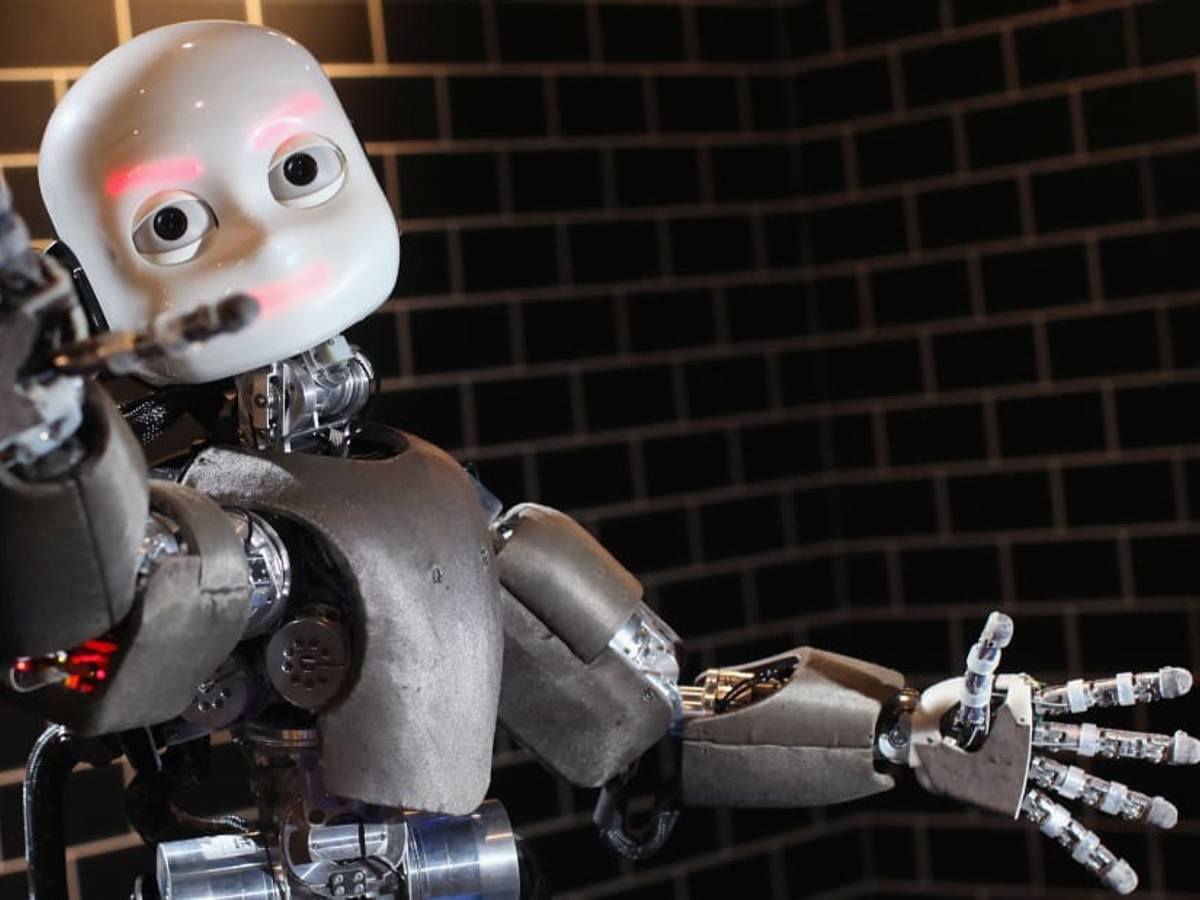
| Dłonie | Pięciopalczaste, zręczne dłonie; dziewięć silników na dłoń za pomocą ścięgien; czujniki dotykowe w dłoni i opuszkach palców |
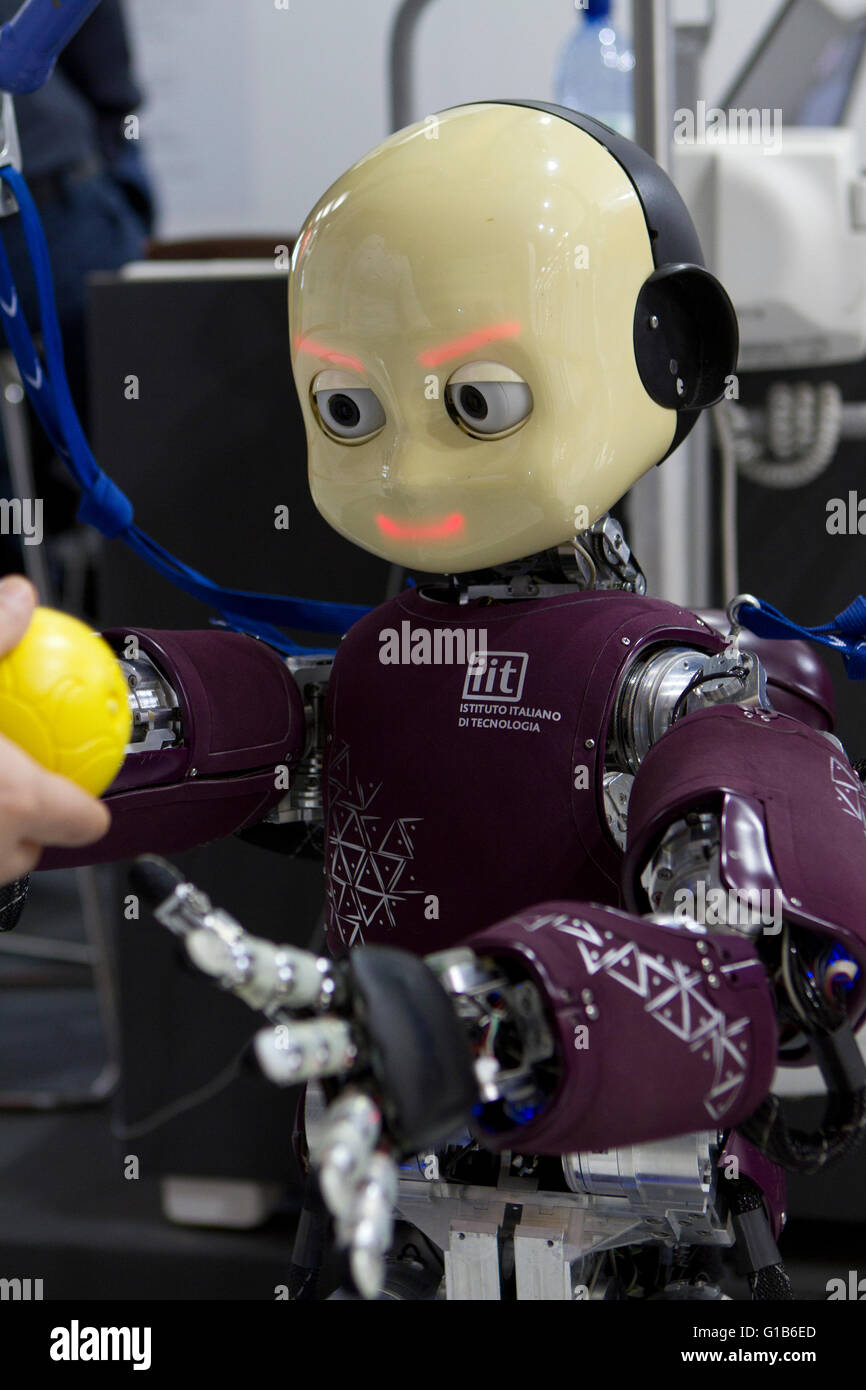
| Czujniki | Kamery stereo, żyroskopy, akcelerometry, mikrofony, enkodery, czujniki siły i momentu obrotowego, pojemnościowa „skóra” dotykowa na opuszkach i górnej części ciała |
| Nogi | Elastyczne nogi (wzorowane na konstrukcji Coman) w wersji iCub 2.5, umożliwiające chodzenie |
| Oprogramowanie | Otwarte źródło; działa w środowisku YARP |
| Możliwości | Czołganie się, chwytanie, rozpoznawanie obiektów, interakcja; iCub3 używany jako system teleoperacji/awatar |
Podział na modele
iCub ewoluował przez wiele wersji – IIT modernizuje istniejące egzemplarze, ulepszając mechanikę głowy, elektronikę, sensorową skórę i elastyczne nogi, zamiast budować przestarzałe wersje 1.x. Obecna generacja obejmuje iCub 2.5 (elastyczne nogi, plecak z baterią) oraz iCub3 (wykorzystywany w systemie immersyjnego awatara/teleoperacji IIT). Głowa iCuba jest również dostępna jako konfigurowalny, samodzielny zestaw badawczy.
Poradnik kupującego: co warto wiedzieć
iCub to platforma badawcza do badań nad poznaniem i sztuczną inteligencją. Został stworzony specjalnie do badania ludzkiego poznania, uczenia się przez ucieleśnienie i AI – jego dziecięcy rozmiar i bogate wyposażenie sensoryczne odzwierciedlają ten cel.
Otwarte źródło ma kluczowe znaczenie. Otwarta konstrukcja i oprogramowanie pośredniczące YARP sprawiają, że iCub jest głęboko konfigurowalny – to główny powód jego szerokiego zastosowania w środowisku akademickim.
Sensorowa skóra i zręczne dłonie to cechy wyróżniające. Pojemnościowa skóra dotykowa i pięciopalczaste dłonie napędzane ścięgnami czynią iCuba wyjątkowym w badaniach nad manipulacją i interakcją człowiek-robot.
Kontakt z IIT bezpośrednio. iCub jest dostarczany do instytucji badawczych przez IIT; należy spodziewać się procesu zakupu inwestycyjnego i możliwości skonfigurowania (lub zakupu samej głowy).
iCub a podobne roboty
- iCub vs PAL REEM-C: Oba to europejskie humanoidy badawcze; iCub jest wielkości dziecka i skoncentrowany na poznaniu, REEM-C to pełnowymiarowy robot skoncentrowany na lokomocji i interakcji HRI.
- iCub vs SoftBank/Aldebaran NAO: Oba to małe humanoidy do badań/edukacji; iCub jest większy, znacznie bogatszy w sensory i przeznaczony do głębszych badań nad poznaniem.
- iCub vs DLR Justin: Oba kładą nacisk na badania nad zręczną manipulacją; iCub to otwarta, szeroko rozpowszechniona platforma, Justin to pokazowe rozwiązanie DLR.