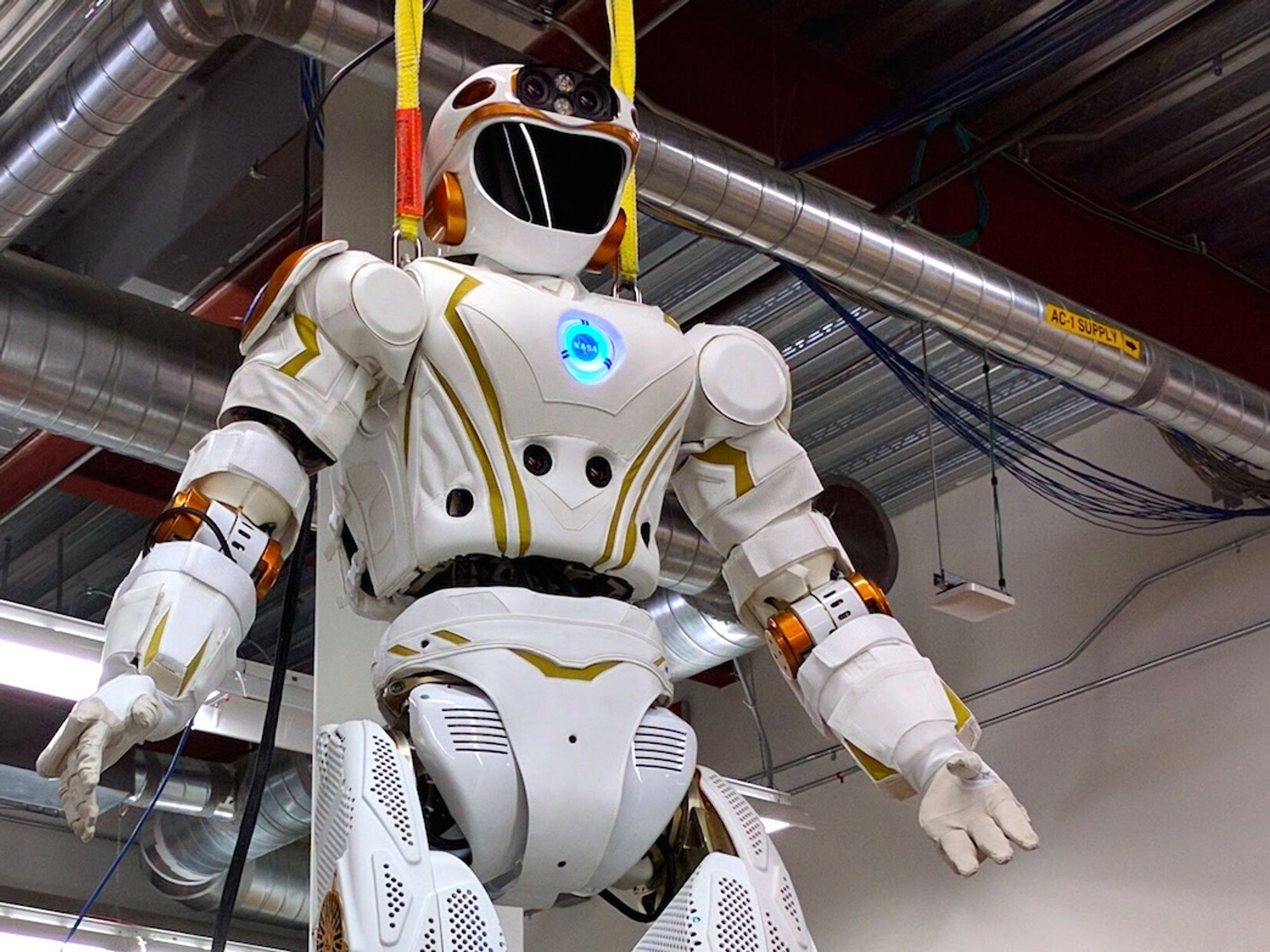
Valkyrie, oznaczona również jako R5, to pełnowymiarowy humanoidalny robot opracowany przez Centrum Kosmiczne Johnsona (JSC) NASA. Prace projektowe rozpoczęto w październiku 2012 roku, a prototyp ukończono w lipcu 2013 roku – w zaskakująco krótkim czasie około 15 miesięcy – aby wziąć udział w zawodach DARPA Robotics Challenge Trials w 2013 roku. Valkyrie to wytrzymały, w pełni elektryczny humanoid zaprojektowany do działania w zdegradowanych lub uszkodzonych środowiskach stworzonych przez człowieka – a po zmianie priorytetów NASA – do wspierania przyszłych misji kosmicznych, potencjalnie jako robot „opiekun” przygotowujący lub utrzymujący siedliska na Księżycu lub Marsie przed przybyciem załóg i razem z nimi.
Dostępność
Valkyrie to robot badawczy NASA, nigdy nie sprzedawany komercyjnie. NASA zbudowała niewielką liczbę egzemplarzy – jeden pozostawiła u siebie, a inne udostępniła w formie użyczeń badawczych uniwersytetom (głównie MIT, Northeastern University oraz University of Edinburgh w Szkocji) w celu rozwijania zaawansowanego oprogramowania i możliwości. Koszt budowy każdego robota szacuje się na około 2 miliony dolarów. Nie istnieje możliwość zakupu.
Pełna specyfikacja
| Parametr | Wartość |
|---|---|
| Twórca | NASA Johnson Space Center (JSC) |
| Projekt/prototyp | Projekt rozpoczęto w październiku 2012; prototyp ukończono w lipcu 2013 (zbudowany w ~15 miesięcy) |
| Wysokość | ~1,87–1,9 m |
| Masa | ~125–129 kg |
| Stopnie swobody | 44 |
| Dłonie | Każda dłoń ma kciuk i trzy palce |
| Napęd | W pełni elektryczny; siłowniki szeregowo-sprężyste w ramionach, nogach, tułowiu i dłoniach; sterowniki silników „Turbodriver” (pochodne sterownika silnika Robonaut 2) |
| Bateria | ~1,8 kWh, dwunapięciowa, wymienna |
| Budowa | Modułowa – każdą kończynę można zdjąć za pomocą jednego złącza i jednej śruby; pokryta miękką tkaniną i pianką |
| Czujniki | System kamer głowy firmy Carnegie Robotics; kamery stereoskopowe plus laser/lidar do obrazowania 3D |
| Sterowanie | Praca autonomiczna oraz zdalne sterowanie/teleoperacja |
| Dziedzictwo | Zbudowany w oparciu o wcześniejsze doświadczenia NASA z robotem Robonaut 2 |
| Zastosowanie | Pierwotnie do reagowania na katastrofy; w 2014 przekierowany na misje kosmiczne i planetarne |
Znaczenie
Valkyrie to pierwszy dwunożny humanoidalny robot NASA i znaczący krok w wizji agencji dotyczącej humanoidalnych robotów, które pracują u boku – lub przed – astronautami. Zbudowany na technologii Robonaut 2, ale jako samodzielny dwunóg, Valkyrie został zaprojektowany do radzenia sobie z zadaniami, jakie mógłby wykonywać robot „opiekun” na Marsie: naprawa nieszczelności siedliska, rozkładanie paneli słonecznych i ustawianie anten komunikacyjnych przed przybyciem ludzi. Udzielając pożyczek wiodącym uniwersytetom, NASA przekształciła Valkyrie w wspólną platformę badawczą, która rozwinęła oprogramowanie humanoidalne daleko poza mury NASA – a jego szeregowo-sprężysta, modułowa konstrukcja wpłynęła na późniejszą inżynierię humanoidalną.
> Uwaga: Apptronik, twórca humanoidalnego robota Apollo (opisywanego wcześniej w tej serii), wywodzi się częściowo z zespołów, które pracowały nad Valkyrie – dlatego nazwa „Valkyrie” bywa błędnie przypisywana Apptronikowi. Valkyrie to robot NASA.
Valkyrie a pokrewne roboty
- Valkyrie vs NASA Robonaut: Robonaut to wcześniejszy program humanoidalny NASA; Valkyrie to samodzielny dwunożny robot zbudowany na technologii Robonaut 2.
- Valkyrie vs DRC-HUBO: Oba zbudowano na DARPA Robotics Challenge; DRC-HUBO wygrał finały w 2015 roku.
- Valkyrie vs Apptronik Apollo: Łączy je dziedzictwo inżynieryjne – zespoły stojące za Apollem pracowały nad Valkyrie – ale Valkyrie to robot badawczy NASA, a Apollo to produkt komercyjny.
Źródło: NASA Johnson Space Center