REEM-A był pierwszym robotem zbudowanym przez PAL Robotics, firmę z Barcelony założoną w 2004 roku przez sześciu inżynierów. REEM-A powstał z projektu ramienia robotycznego grającego w szachy i rozwinął się w pierwszego humanoida PAL Robotics – wczesną platformę demonstracyjną, która ugruntowała pozycję firmy i jej długą linię robotów „REEM”. Program humanoidów PAL Robotics był związany z finansowaniem pochodzącym ze Zjednoczonych Emiratów Arabskich.
Dostępność
REEM-A był wczesnym robotem demonstracyjnym i rozwojowym, a nie produktem komercyjnym. Był to proof-of-concept, który zapoczątkował dwudziestoletni program humanoidów PAL Robotics. Nie ma ceny ani ścieżki zakupu – jego rolą było ugruntowanie pozycji inżynieryjnej firmy i doprowadzenie do powstania późniejszych, bardziej zaawansowanych robotów.
Pełna specyfikacja
REEM-A był humanoidem demonstracyjnym z początku lat 2000.; PAL nie udostępnił szczegółowej publicznej specyfikacji.
| Aspekt | Szczegóły |
|---|---|
| Producent | PAL Robotics (Barcelona, Hiszpania) – pierwszy robot firmy |
| Era | Połowa lat 2000. (PAL Robotics założone w 2004 r.) |
| Geneza | Powstał z projektu ramienia grającego w szachy |
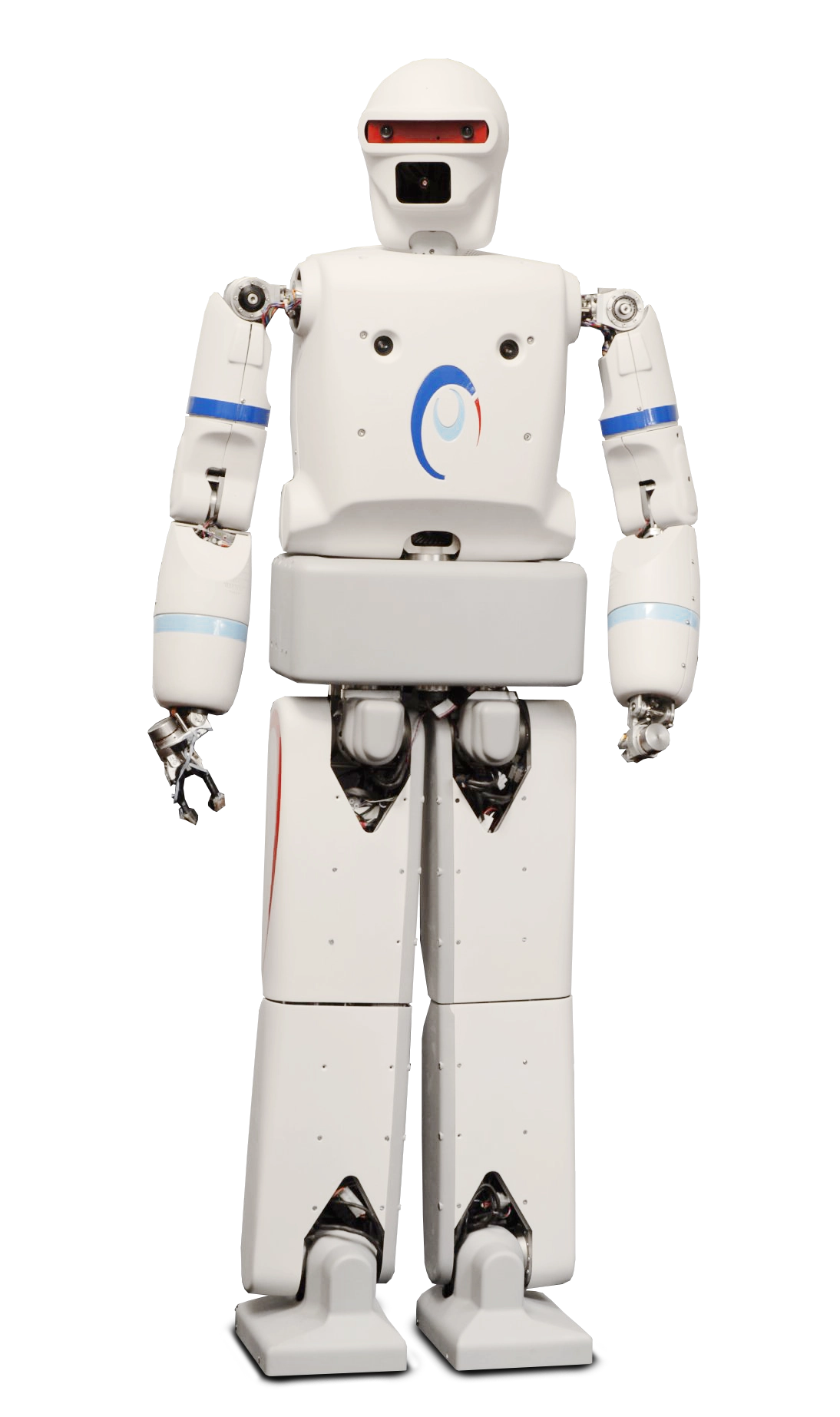
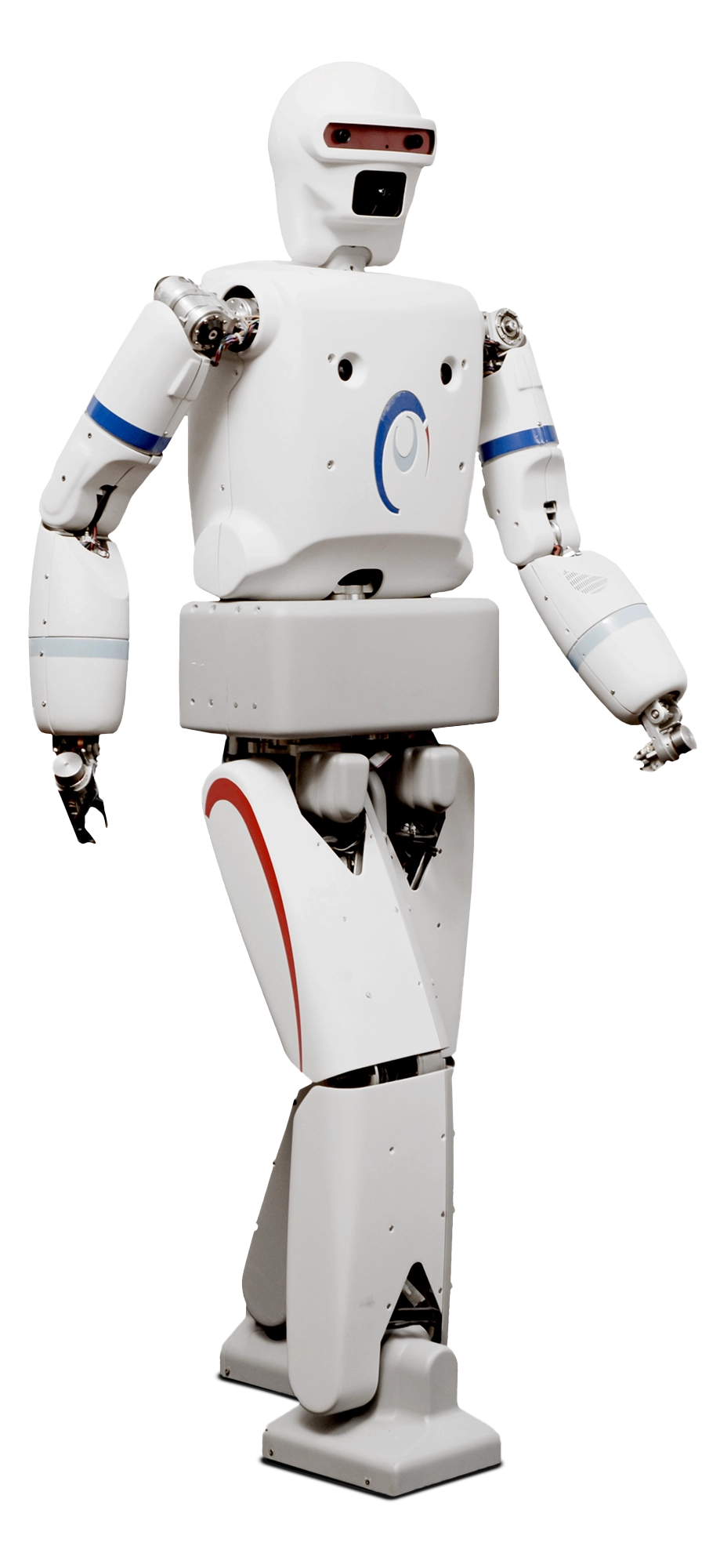
| Rola | Pierwszy humanoid PAL Robotics; wczesna platforma demonstracyjna i rozwojowa |
| Możliwości | Demonstracja gry w szachy i podstawowe ruchy humanoidalne |
Znaczenie
Znaczenie REEM-A jest fundamentalne: to robot, który zapoczątkował PAL Robotics, dziś jedną z najbardziej uznanych europejskich firm zajmujących się humanoidami i robotami usługowymi. Doświadczenia z REEM-A zostały bezpośrednio wykorzystane w REEM-B, kołowym robocie usługowym REEM, oraz w badawczym humanoidzie REEM-C – a ostatecznie w platformach TALOS i TIAGo.
REEM-A a następcy
- REEM-A vs REEM-B: REEM-B był kolejnym, bardziej zaawansowanym krokiem – dwunożnym humanoidem zdolnym do przenoszenia dużych ładunków.
- REEM-A vs REEM-C: REEM-C to nowoczesna, oparta na ROS dwunożna platforma badawcza; REEM-A jest wczesnym przodkiem.
- REEM-A vs obecne roboty PAL: PAL sprzedaje obecnie TALOS (dwunożny robot z kontrolą momentu) i TIAGo (manipulator mobilny); REEM-A to historyczny punkt wyjścia.
Źródło: PAL Robotics