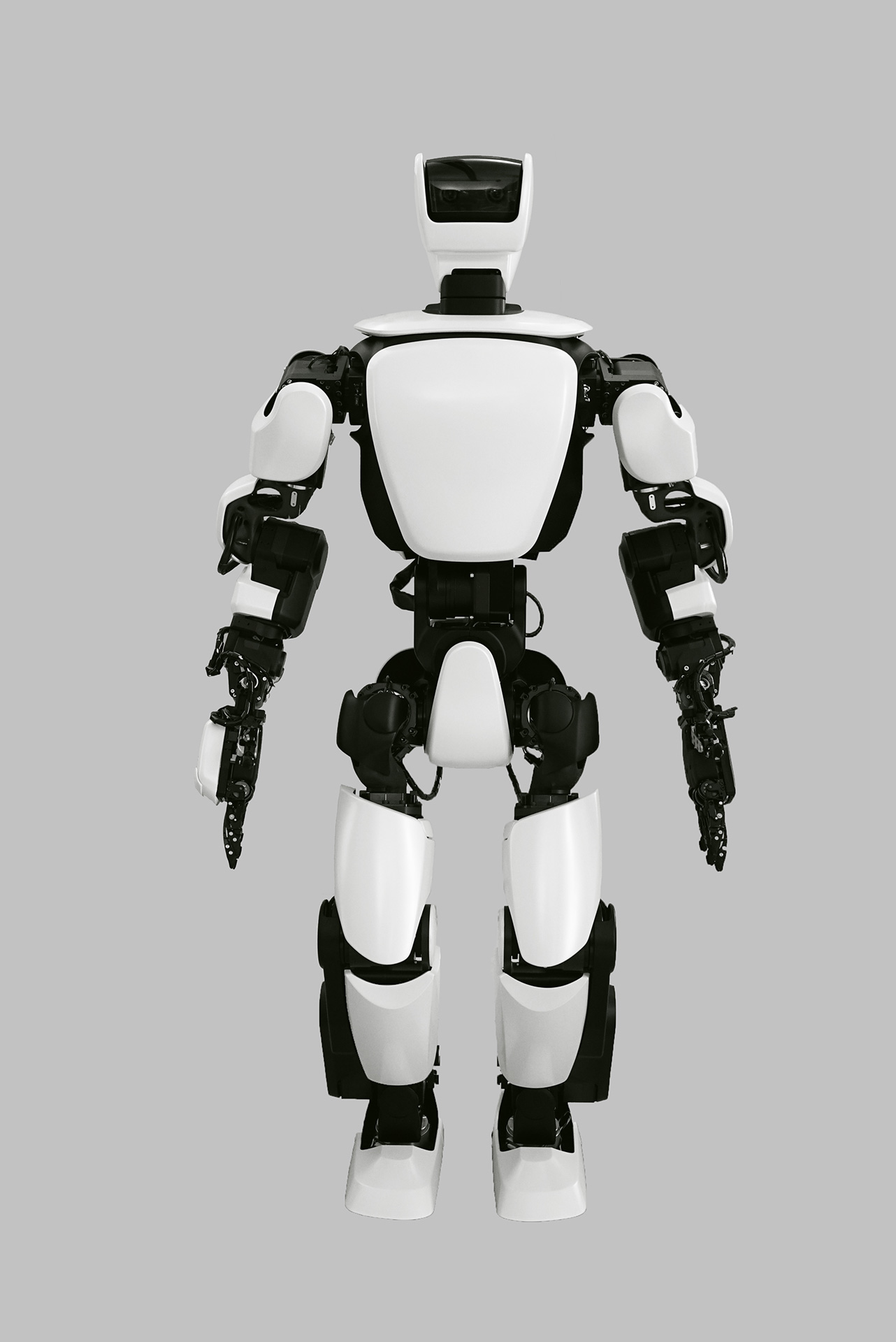
Robot T-HR3 to trzeci humanoid Toyoty, zaprezentowany w listopadzie 2017 roku, opracowany przez dział robotyki partnerskiej (Partner Robot Division). T-HR3 to przede wszystkim platforma teleoperacyjna – zaprojektowano go tak, by był zdalnie sterowany przez operatora, którego ruchy odwzorowuje w czasie rzeczywistym. To znaczna zmiana w porównaniu z wcześniejszymi humanoidami Toyoty (robotami grającymi na instrumentach), które opierały się na zaprogramowanych ruchach – nowy model potrafi bezpiecznie zarządzać fizyczną interakcją z otoczeniem pod nadzorem człowieka.
Dostępność
T-HR3 to platforma badawczo-demonstracyjna, a nie produkt komercyjny. Toyota zbudowała go, by badać technologie – sterowanie elastycznymi stawami, utrzymywanie równowagi całego ciała, zdalne manewrowanie – które mogą znaleźć zastosowanie w przyszłych robotach dla domów, placówek medycznych, budów, terenów katastrof, a nawet kosmosu. Nie ma ceny ani możliwości zakupu.
Pełne dane techniczne
| Parametr | Wartość |
|---|---|
| Rok | Listopad 2017 (trzecia generacja humanoida Toyoty) |
| Sterowanie | Master Maneuvering System – noszony na operatorze zestaw, który odwzorowuje ruchy dłoni, ramion i stóp na robocie; wyświetlacz montowany na głowie daje widok z perspektywy robota |
| Śledzenie operatora | 16 czujników w module Master Maneuvering System |
| Dłonie | Dłonie z 10 palcami z siłowym sprzężeniem zwrotnym dla operatora |
| Kluczowe technologie | Moduły Torque Servo umożliwiające sterowanie elastycznymi stawami, koordynację całego ciała i utrzymywanie równowagi oraz zdalne manewrowanie w czasie rzeczywistym |
| Bezpieczeństwo | Technologia zapobiegania wzajemnemu zakłócaniu ruchów (Self-interference Prevention Technology) – chroni robota i operatora przed kolizją |
| Prezentowane umiejętności | Tai Chi, układanie konstrukcji z klocków, odzyskiwanie równowagi po zderzeniach |
Znaczenie
Wkład T-HR3 polega na bezpiecznej fizycznej interakcji człowiek-robot i intuicyjnej teleoperacji. Dzięki sterowanym momentem obrotowym „elastycznym” stawom robot może delikatnie zarządzać siłami kontaktu, a system sterowania z siłowym sprzężeniem zwrotnym pozwala operatorowi czuć i precyzyjnie kontrolować to, co robi robot. Toyota uznała tę technologię za fundament przyszłych robotów asystujących – w tym takich, które będą mogły być obsługiwane zdalnie, by pomagać ludziom w domu lub w niebezpiecznych środowiskach.
T-HR3 a podobne roboty
- T-HR3 vs Partner Robot Toyoty: T-HR3 rozwinął się poza zaprogramowane ruchy wcześniejszych robotów grających na instrumentach, przechodząc do interakcji w czasie rzeczywistym przez teleoperację.
- T-HR3 vs Toyota Punyo: Oba są częścią badań nad humanoidami Toyoty; Punyo koncentruje się na miękkiej manipulacji całym ciałem, a T-HR3 na teleoperacji i sterowaniu elastycznymi stawami.
- T-HR3 vs 1X NEO: Oba angażują człowieka w pętlę sterowania, ale NEO to produkt konsumencki wykorzystujący okazjonalną asystę zdalną, podczas gdy T-HR3 to czysto badawcza platforma teleoperacyjna.
Źródło: Toyota