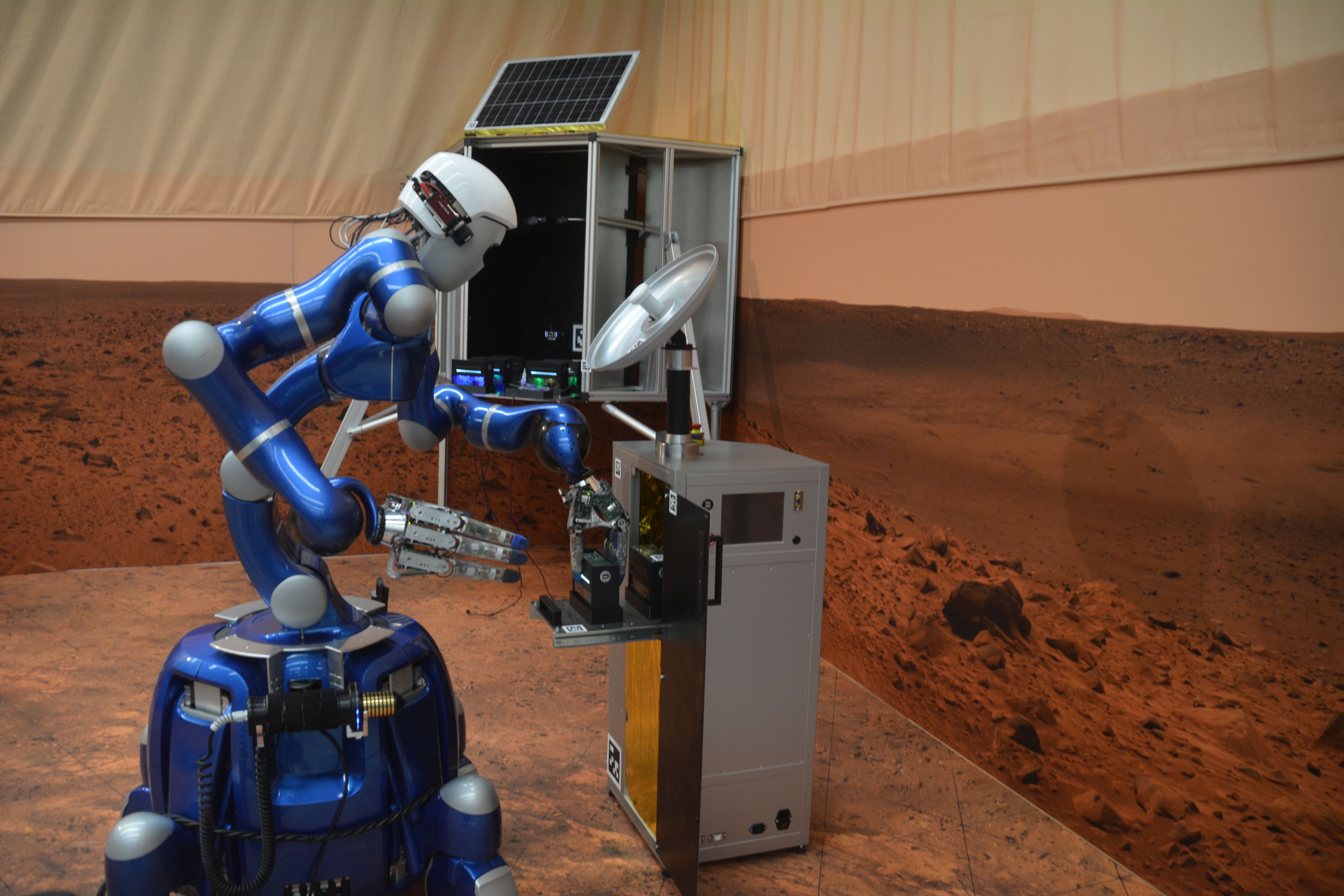
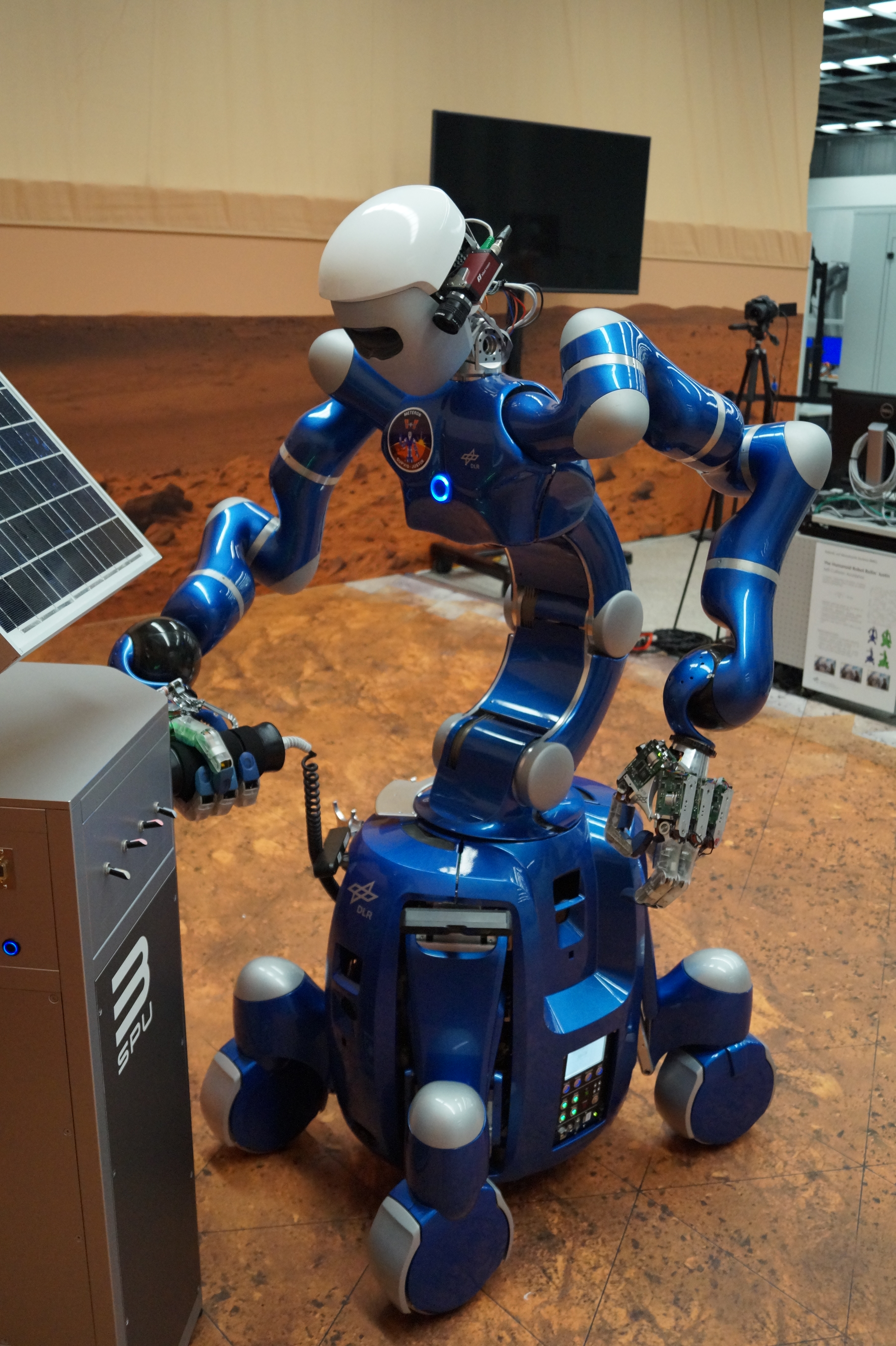
Justin (also known as "Rollin' Justin" and "Agile Justin") is a dexterous two-armed humanoid robot developed by the German Aerospace Center (DLR) — specifically its Robotics and Mechatronics Center. Justin is not a bipedal walker: it is a highly capable humanoid upper body (torso, head, and two arms with sophisticated hands) mounted on a wheeled, extendable base. Justin is built for advanced research into dexterous manipulation and is notably skilled — it can, for example, catch balls thrown to it by observing and predicting their trajectory in a fraction of a second.
Availability
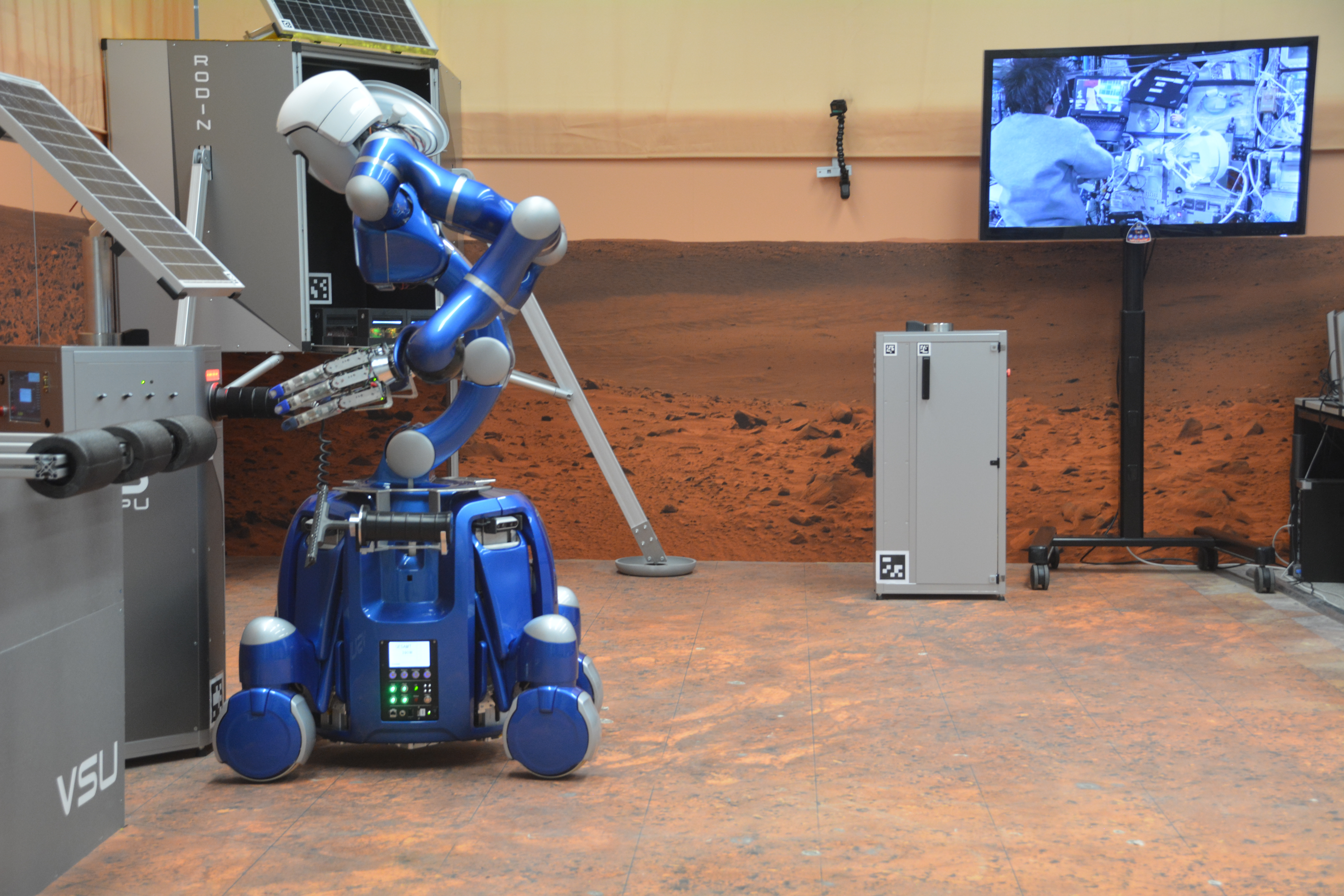
Justin is a research robot, developed and used internally by DLR. It is not a commercial product — there is no price or purchasing path. DLR uses Justin to push the boundaries of dexterous manipulation, two-arm coordination, and telerobotics, including space-telerobotics research (DLR has explored having astronauts on the International Space Station remotely control robots like Justin on the ground).
Full Specifications
| Aspect | Detail |
|---|---|
| Developer | German Aerospace Center (DLR), Robotics and Mechatronics Center |
| Type | Two-armed dexterous humanoid upper body on a wheeled, extendable mobile base ("Rollin' Justin") |
| Hands | Highly capable dexterous hands — more advanced than DLR's TORO, built for interacting with a wide range of objects |
| Notable skill | Catching thrown balls by observing and predicting their trajectory in real time |
| Research focus | Dexterous and bimanual manipulation; telerobotics, including space-telerobotics |
| Technology base | Built on DLR's lightweight, torque-controlled robotics expertise (the same heritage as the KUKA-DLR Lightweight Robot arms) |
Significance
Justin is one of the most dexterous research humanoids ever built — a showcase of DLR's world-leading work in lightweight, torque-controlled, force-sensitive robotics. Its two-arm coordination and advanced hands make it a benchmark platform for manipulation research, and its use in telerobotics experiments (including ISS-to-ground control) connects directly to DLR's space-robotics mission. Justin demonstrates what is possible when dexterity, not locomotion, is the design priority.
Justin vs Related Robots
- Justin vs DLR TORO: Same institution — TORO is DLR's bipedal walking humanoid; Justin is the dexterous, wheeled-base manipulation humanoid with more capable hands.
- Justin vs Astribot S1: Both prioritize dexterous manipulation over bipedal locomotion.
- Justin vs NASA Robonaut 2: Both are dexterous upper-body humanoids built for skilled manipulation, including in space-related contexts.
Source: German Aerospace Center (DLR)