Cassie was priced at $300,000 as a research-only platform. It is now discontinued, and no new units are sold.
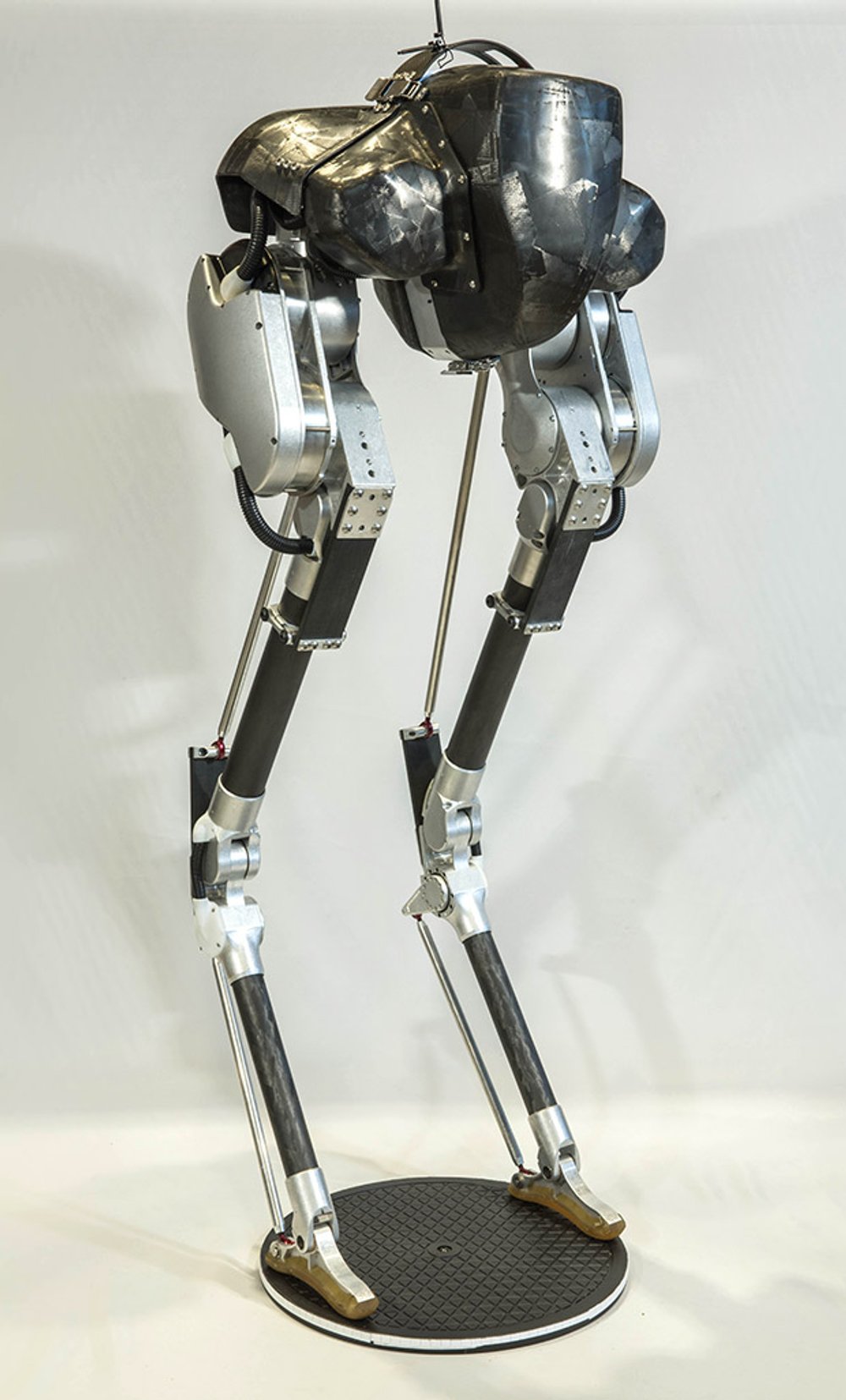
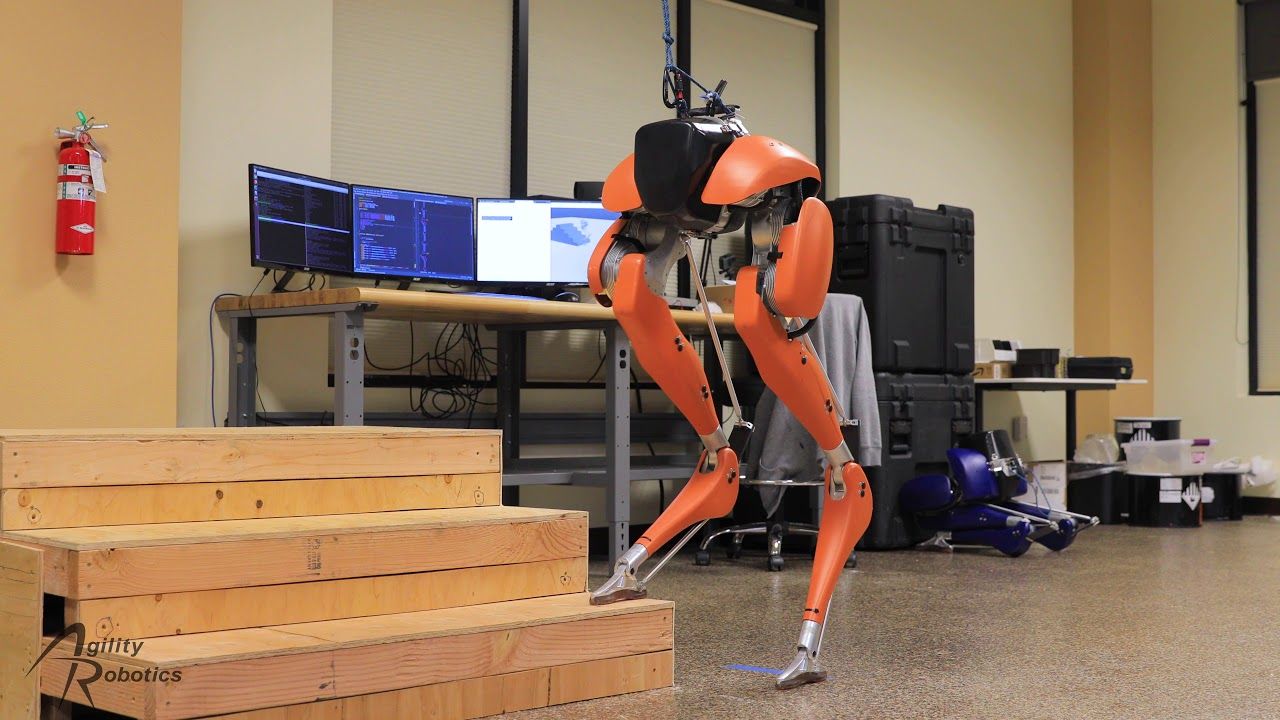
Cassie can walk, run up to 4 m/s (14.4 km/h), climb stairs, and completed an untethered 5K run on a single charge. It has no arms or manipulation capability.
No, Cassie was discontinued around 2019. Some units may still be used in university labs, but no commercial sales exist.
Digit is Cassie’s successor, adding a torso, arms, and sensors for logistics tasks. Cassie is purely a bipedal locomotion platform with no upper body.
Height: 1.15 m, weight: 31 kg, 10 DOF (legs only), top speed: 4 m/s, battery life: ~0.9 hours (5K run), no payload.
Agility Robotics, founded in 2015 in Tangent, Oregon, USA, originally a spin-out from Oregon State University.
Approximately 53 minutes for an untethered 5K run on a single charge, though this was never a formal specification and varied with terrain and gait.
Exclusively academic research labs and locomotion software developers. No industrial deployments due to lack of arms.
No. Cassie is a legs-only platform with no arms, hands, or grippers. It cannot interact with objects.
Yes, its control software and ROS interfaces were shared openly with the research community, a key reason for its widespread adoption.