TORO has no commercial price because it is a research platform built for internal DLR use only. DLR may collaborate with external institutes but does not sell units. If you were to replicate the hardware, component costs (custom torque-controlled joints, sensors, compute) would likely exceed $200,000.
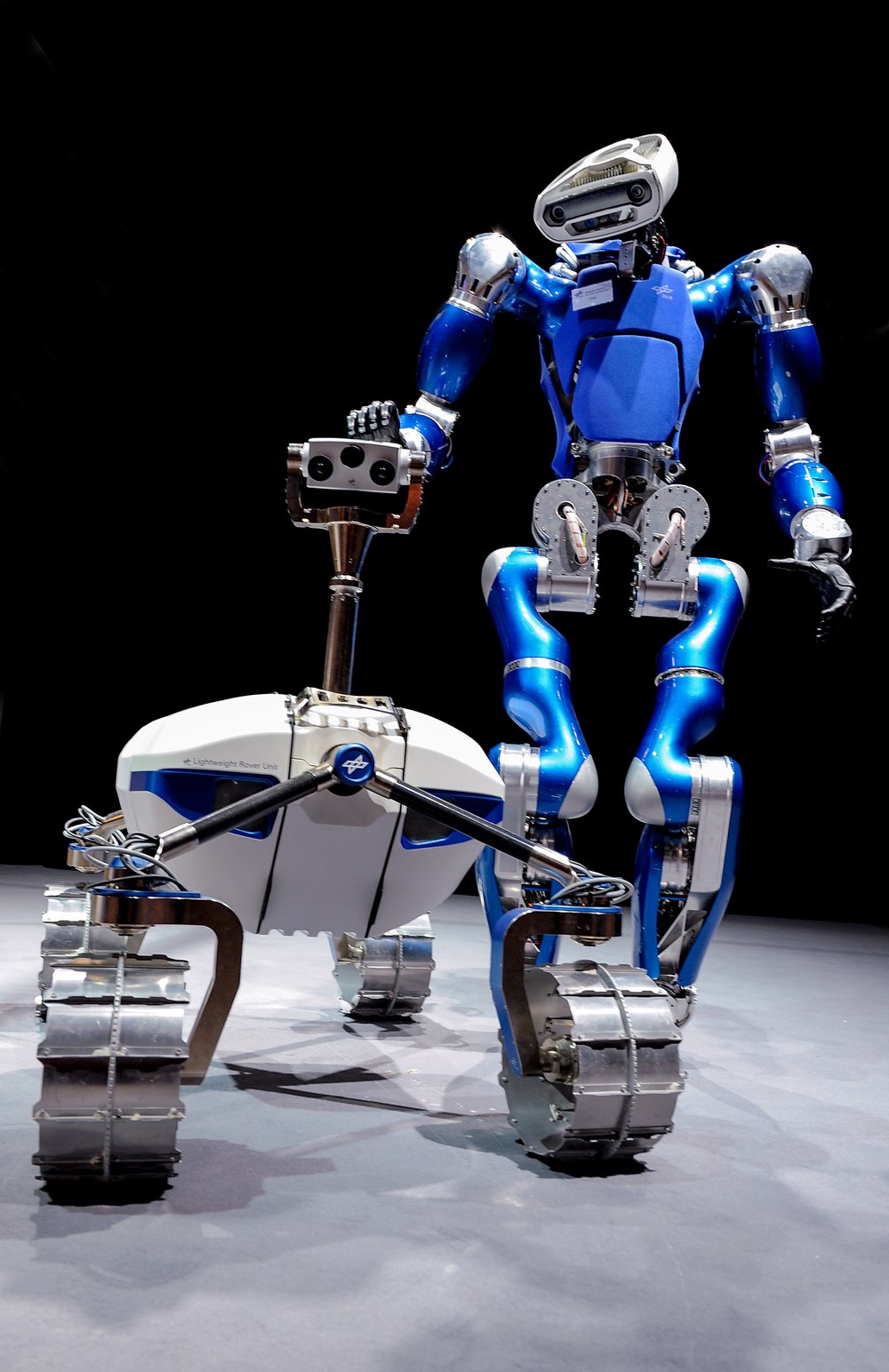
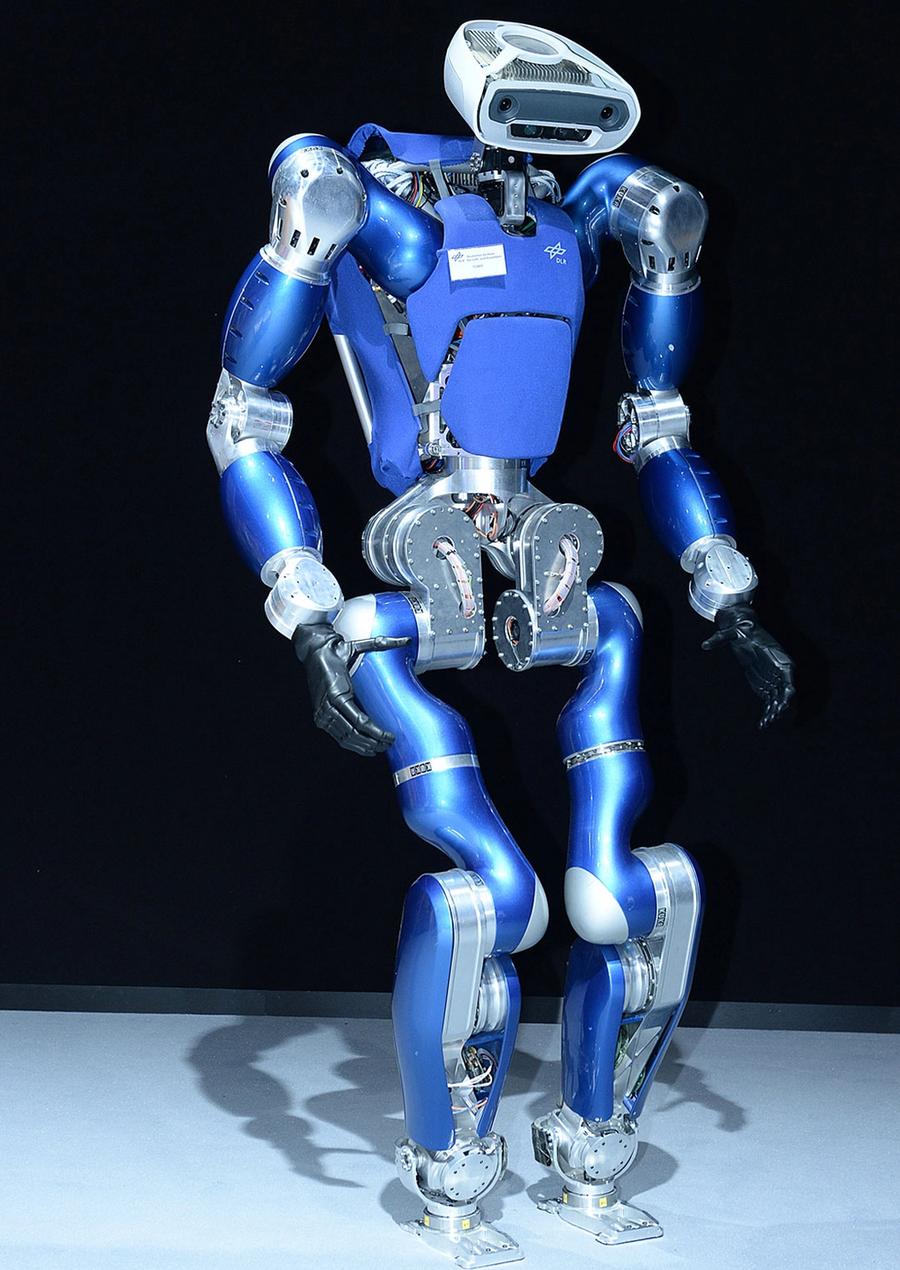
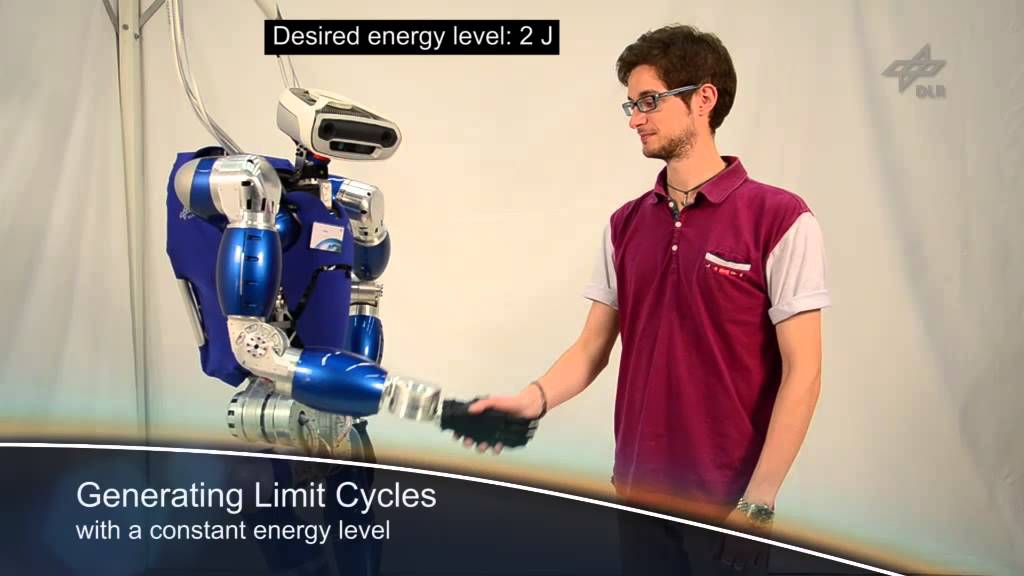
TORO is a 39-DOF bipedal robot capable of compliant walking, balancing against pushes, and performing simple manipulation while standing or stepping. It uses torque control for smooth, safe motions, but its walking speed is limited to about 0.72 km/h and it relies on an external power tether.
No, TORO is not commercially available. It is a research-only platform operated by the German Aerospace Center (DLR). There is no product page, order form, or public price. Interested labs should contact DLR directly about research collaborations.
Both are non-commercial humanoids, but Atlas uses hydraulic actuation for explosive agility and outdoor capability, while TORO relies on electric series-elastic joints for precise, compliant torque control at every axis. TORO is better suited for lab-based torque-control research, Atlas for high-dynamics real-world demonstrations.
Height: 1.74 m, weight: 55 kg, 39 degrees of freedom (12 legs, 12 arms, 2 torso, 1 head), arm payload: ~5 kg, max walking speed ~0.72 km/h, tethered 48 V power (no onboard battery), running Linux with Xenomai real-time framework.
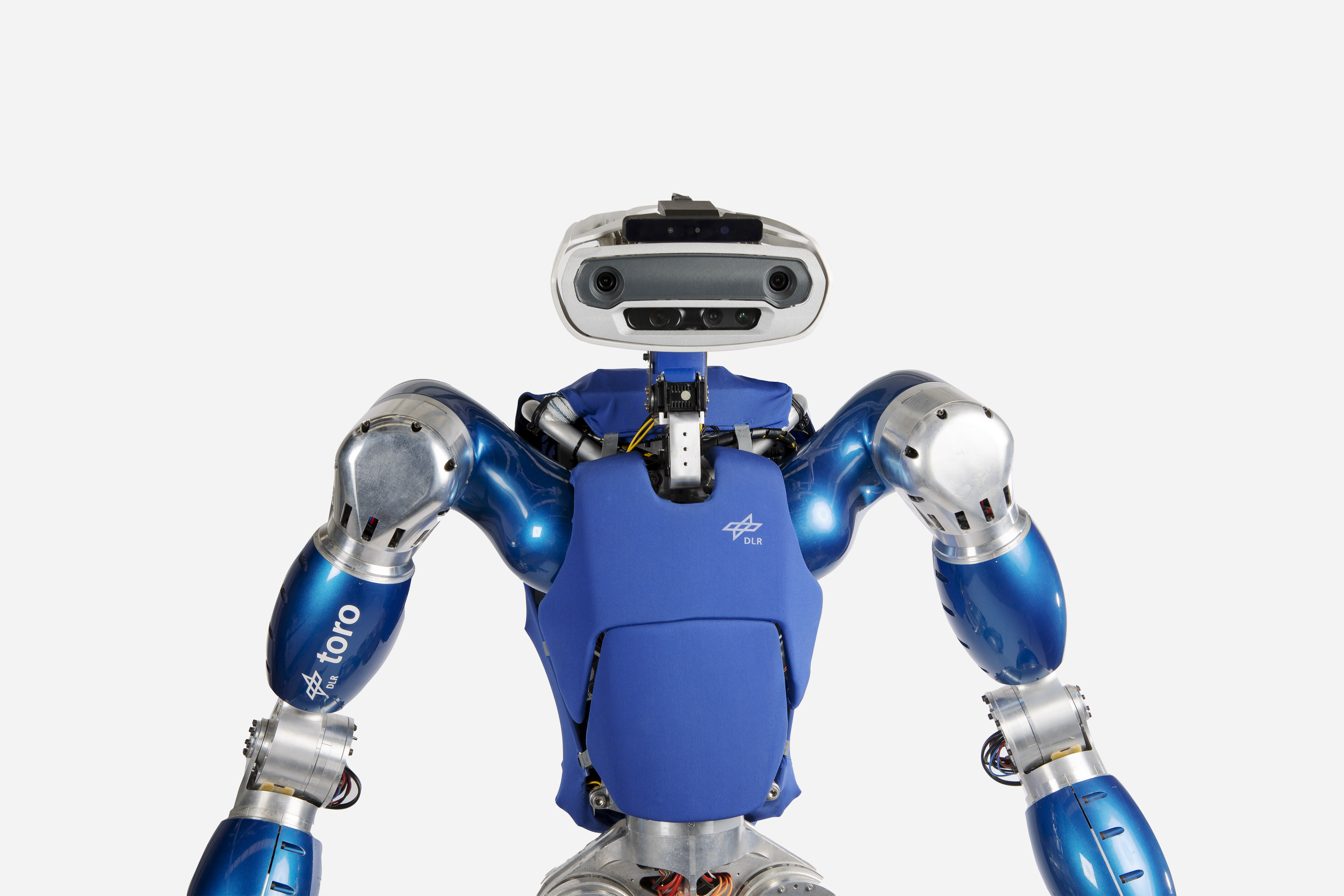
The German Aerospace Center (DLR), specifically the Institute of Robotics and Mechatronics in Oberpfaffenhofen, Germany, developed and operates TORO. DLR has a long history in lightweight torque-controlled arms and bipeds dating back to the early 2000s.
TORO has no battery; it runs on a tethered external 48 V DC supply. Battery life is therefore limited only by the power grid. There is no onboard energy storage, making it unsuitable for untethered operation.
TORO is used exclusively in academic and government research settings, primarily in humanoid robotics labs studying bipedal walking, whole-body control, and compliant manipulation. It has no deployments in commercial industries.
While DLR has demonstrated TORO stepping on uneven surfaces in lab mock-ups, its tether, sensor suite (stereo camera, RGB-D, rotating laser scanner), and modest push-recovery robustness are not designed for unconstrained outdoor navigation. It remains a controlled indoor research platform.
TORO is equipped with an IMU, joint torque and position sensors, 6-axis force/torque sensors at each foot, a stereo camera, an RGB-D sensor (e.g., ASUS Xtion), and a rotating laser scanner (e.g., Hokuyo UTM-30LX) for environment perception.