The Honda E2-DR is a research prototype and has never been offered for sale. No price has been published. Any figure circulating online is speculative. Honda has not indicated any intent to commercialize it.
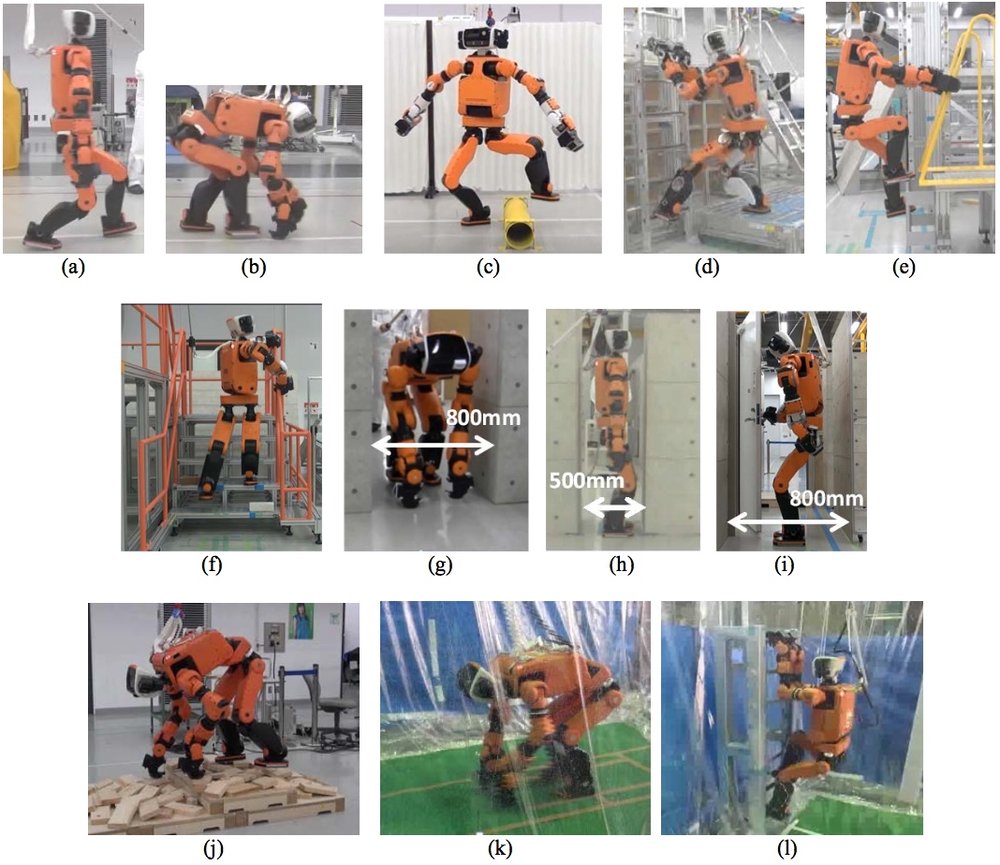
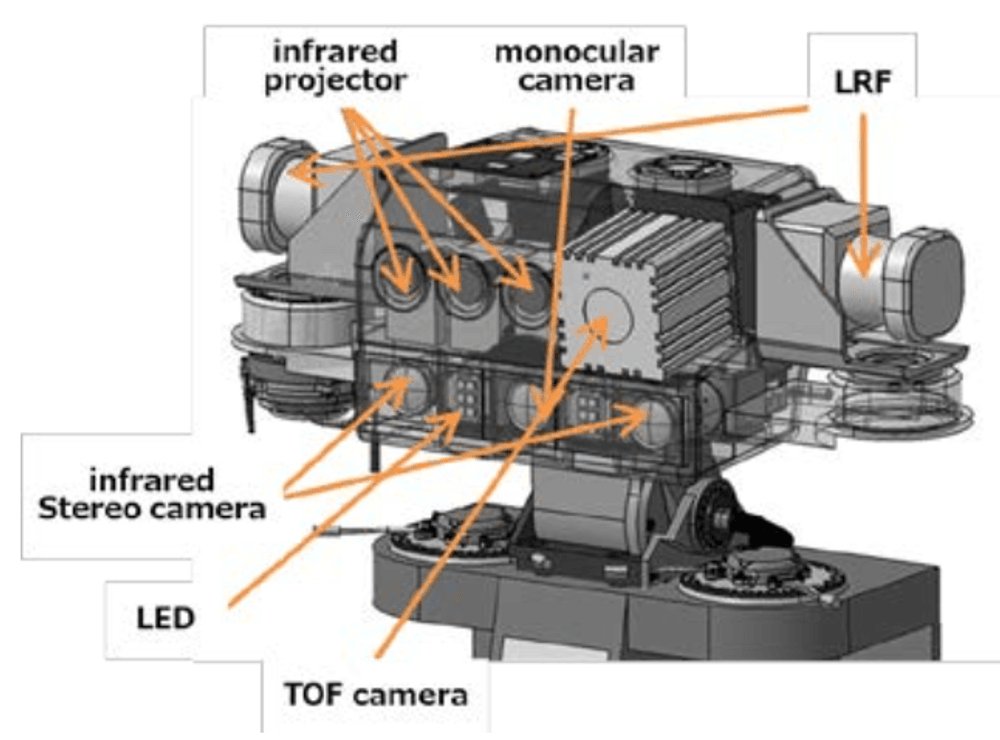
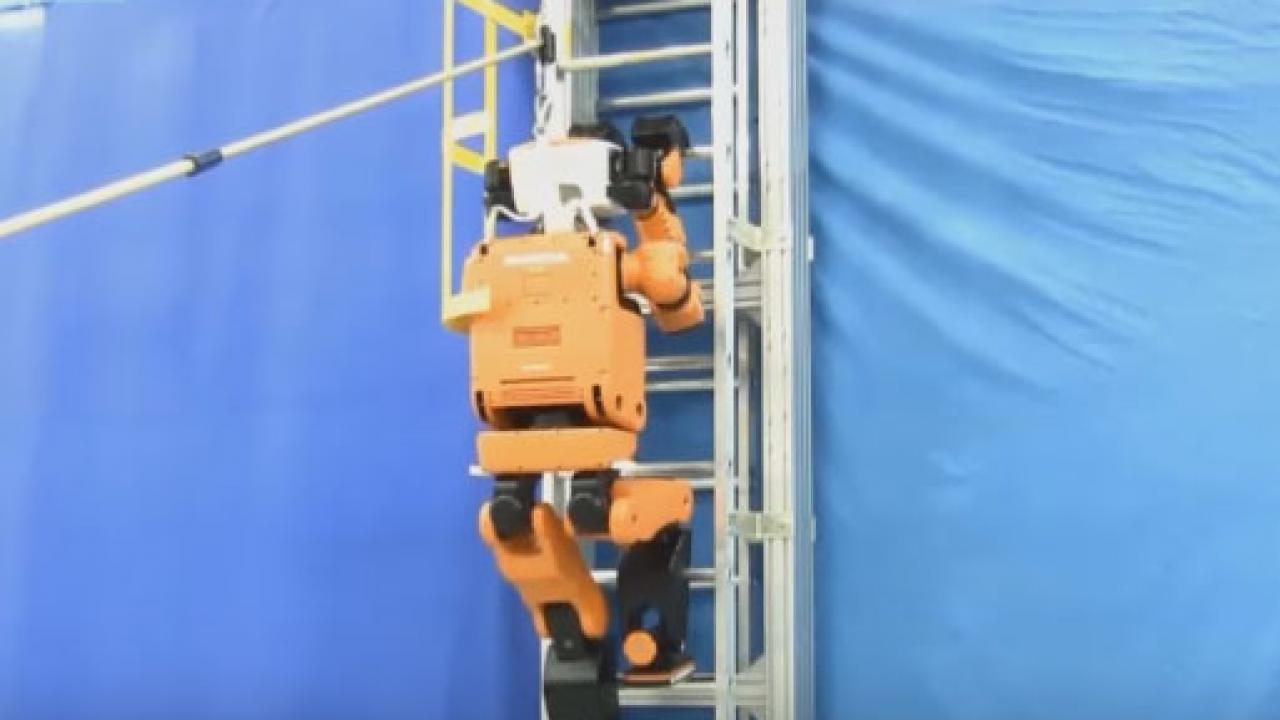
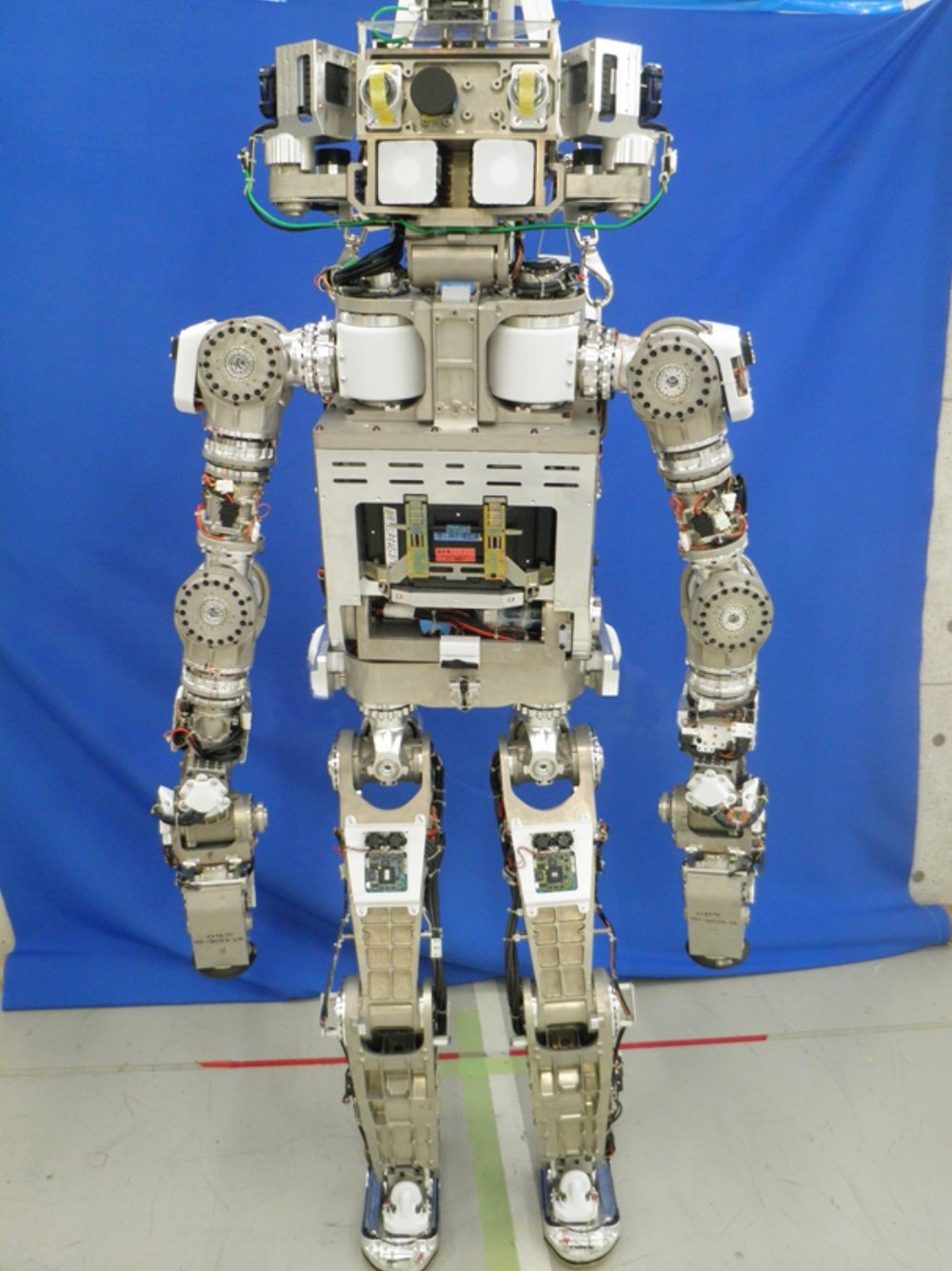
It can walk bipedally at up to 2.7 km/h, crawl under low obstacles, climb ladders, and operate simple tools with its grippers. Its IP67 rating allows operation in heavy rain, dust, and temporary submersion. It uses stereo cameras and 3D LIDAR for autonomous navigation.
No. As of 2026, the E2-DR remains a research-only platform within Honda R&D. It is not available for purchase, lease, or rental, and no units have ever been sold to external organizations.
Both are research-grade bipedal humanoids, but Atlas uses high-pressure hydraulics for explosive, dynamic motions (backflips, parkour) while E2-DR uses electric motors and harmonic drives for quieter, more sealed operation. E2-DR has IP67 protection; Atlas lacks environmental sealing. Atlas is lighter (~89 kg vs 85 kg) but neither is commercially available.
Height: ~1.68 m, weight: ~85 kg, degrees of freedom: 33, max speed: 2.7 km/h, battery life: ~2 hours, IP67 dust/water protection, sensors: stereo cameras, 3D LIDAR, IMU, force/torque feet and hands.
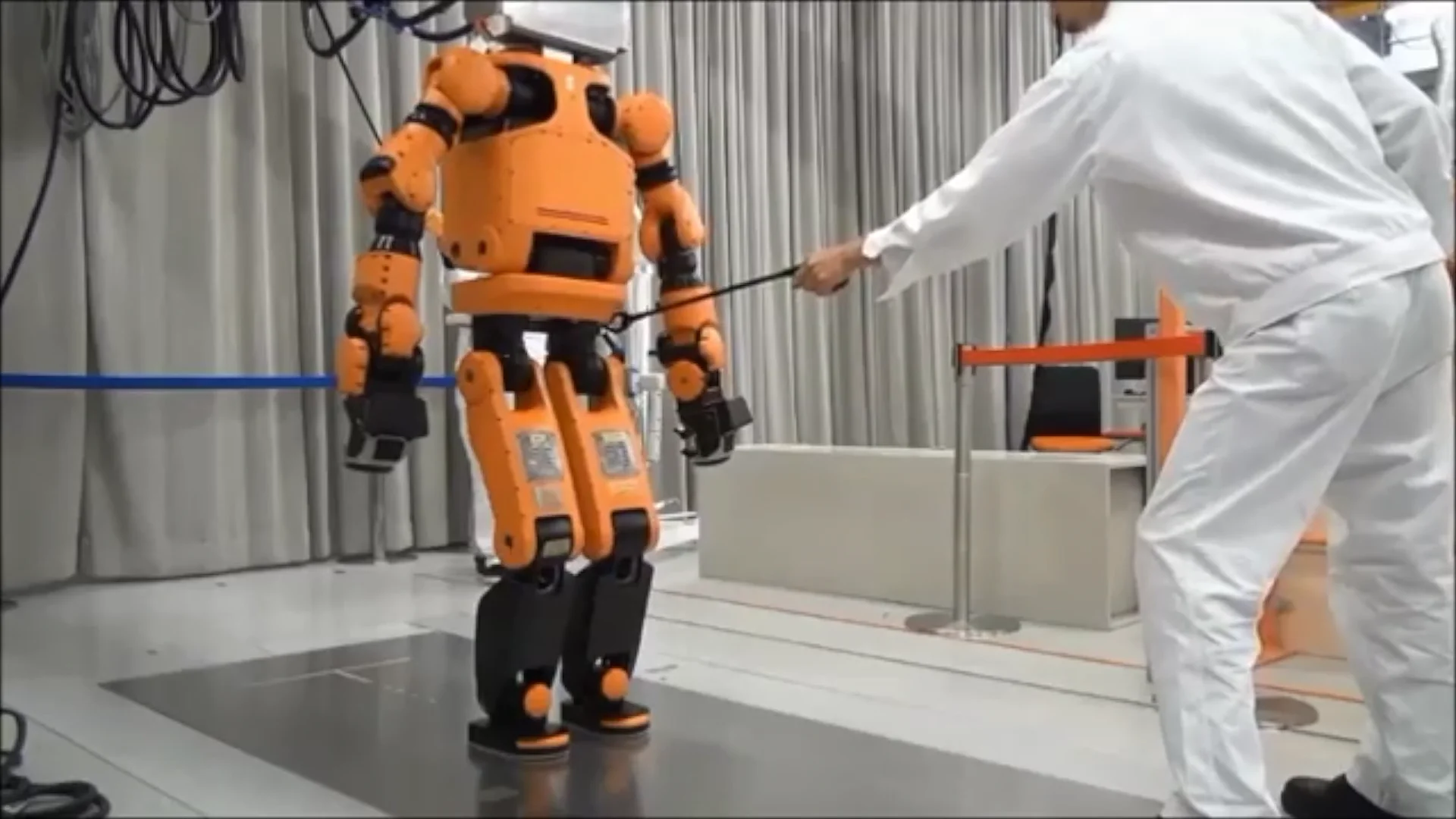
It is built by Honda Motor Co., Ltd., headquartered in Minato, Tokyo, Japan. Honda has a long history in humanoid robotics starting with ASIMO. The E2-DR project was developed by the company’s R&D division.
The battery lasts approximately 2 hours under typical operation. It is not swappable, and charging time has not been publicly disclosed. This limits continuous deployment in the field.
No industries currently deploy the E2-DR as it is a prototype. Its intended sectors include disaster response, nuclear decommissioning, and hazardous industrial inspection, but it has only been used internally at Honda for research.