The Honda P1 was never sold commercially; it was a confidential research prototype. No public price exists. Estimated value as a historical artifact would be purely speculative.
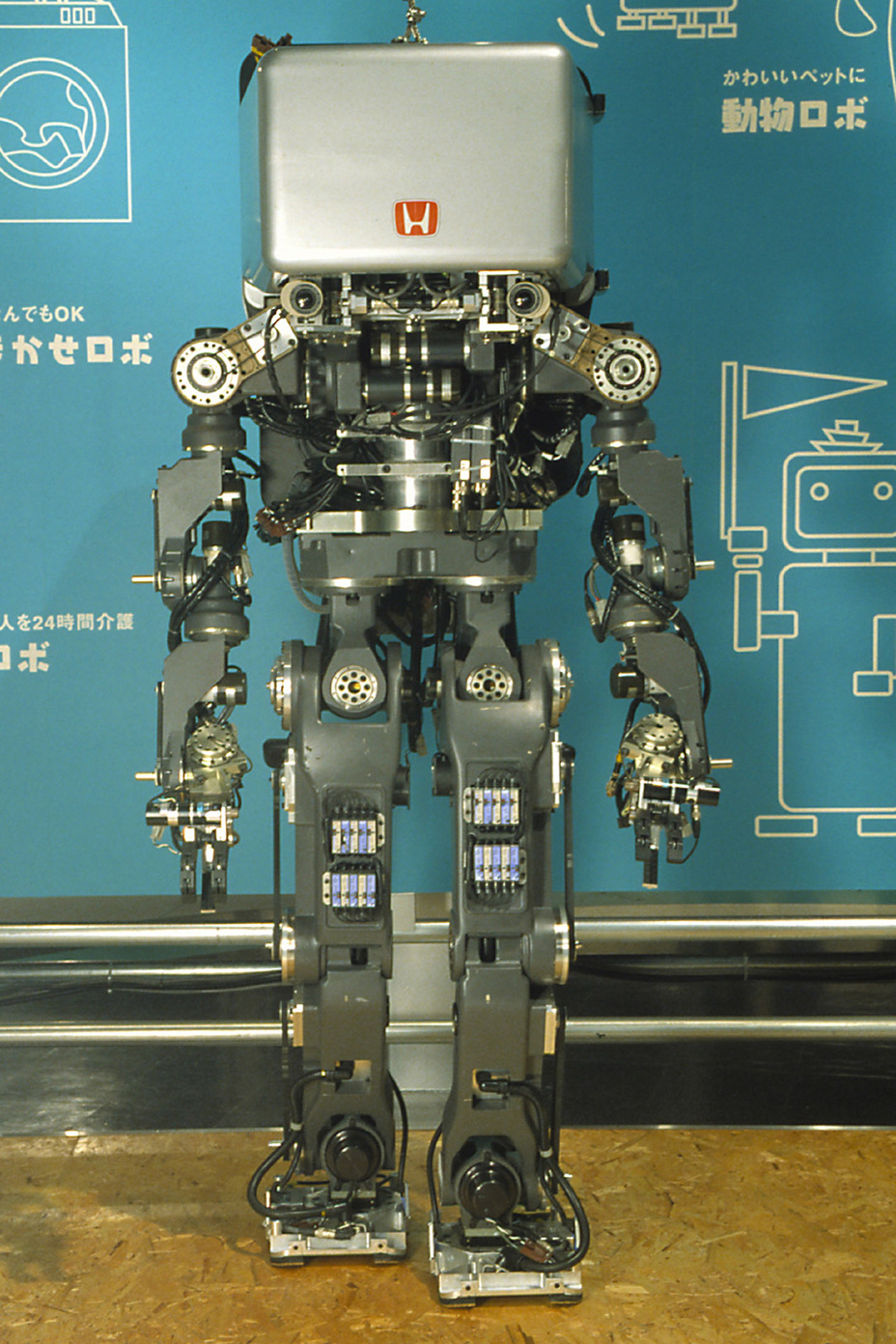
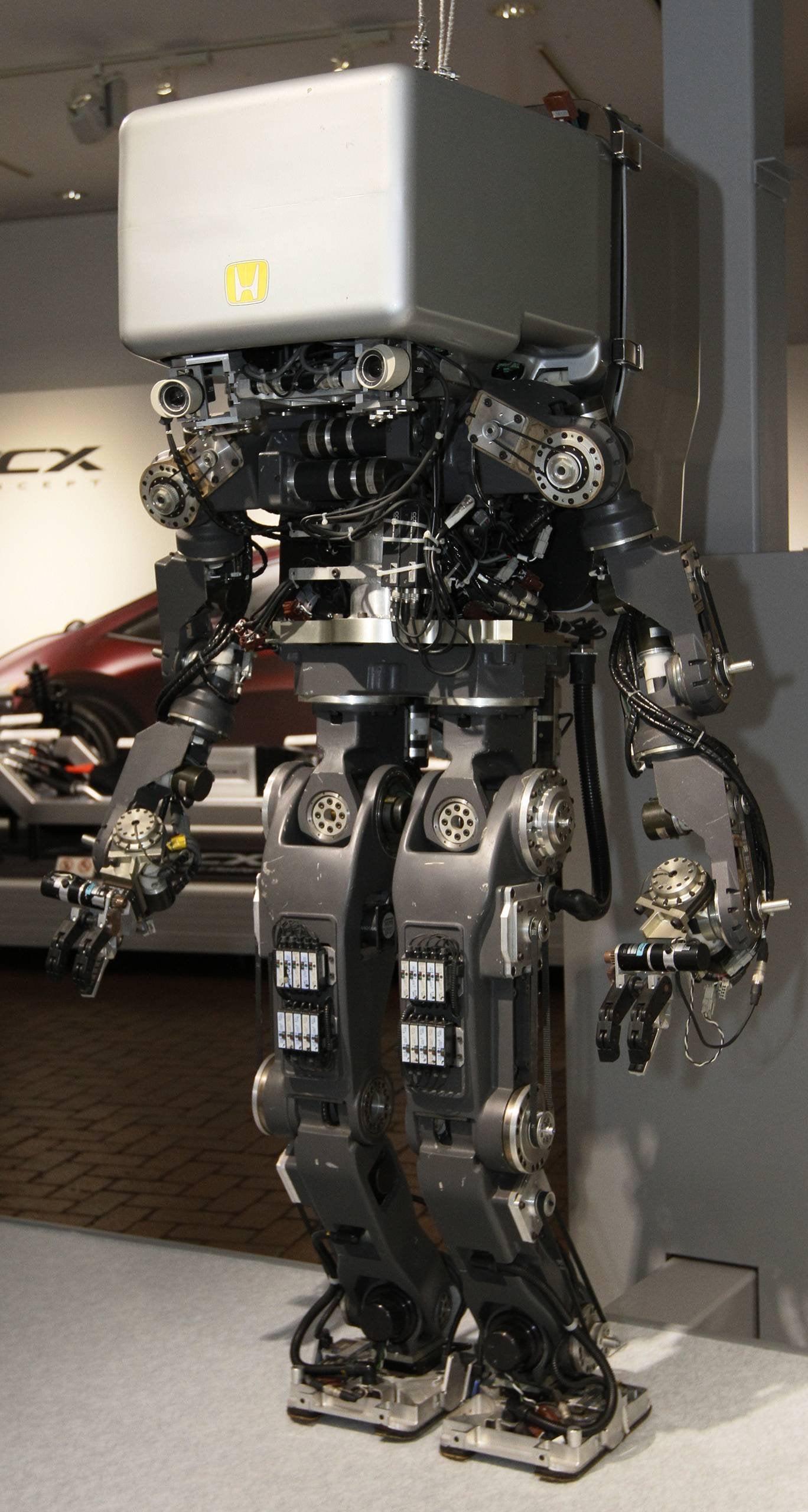
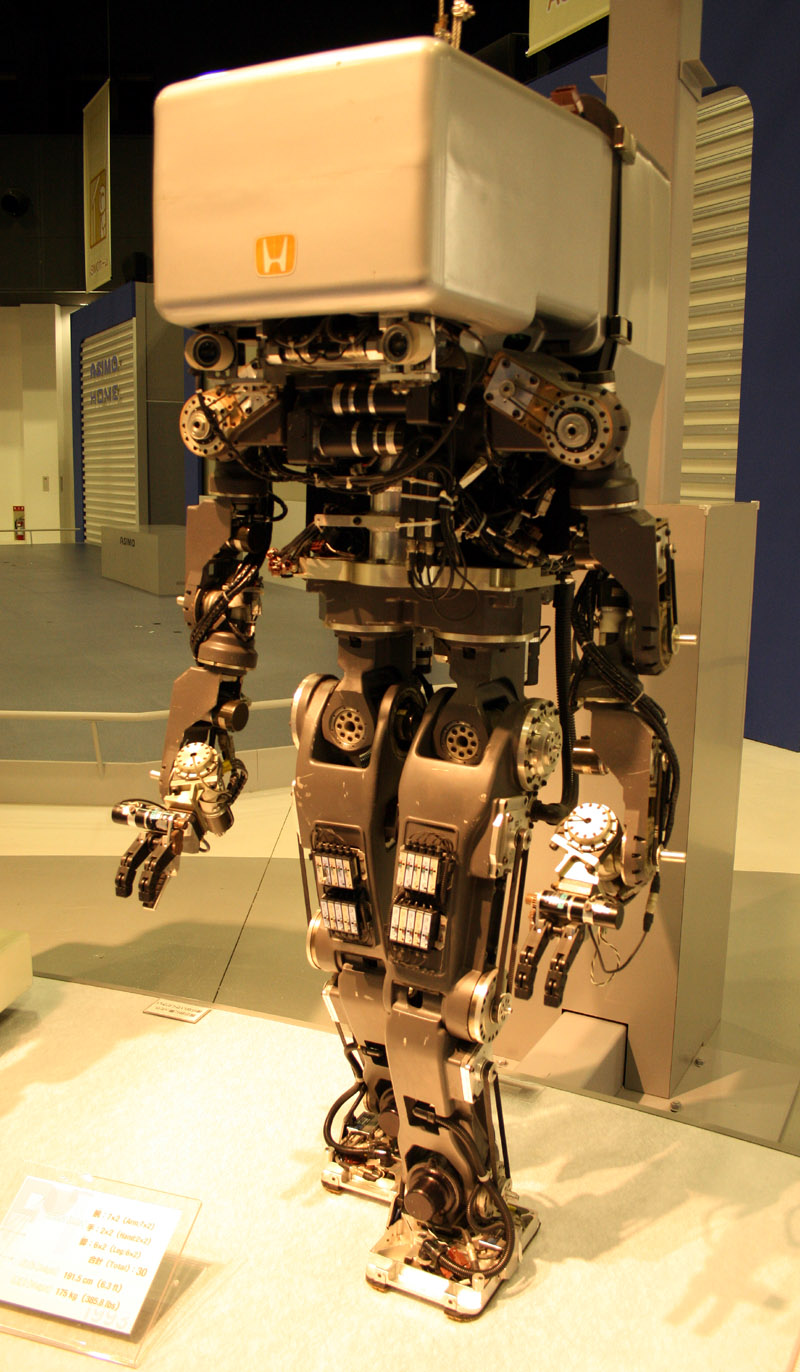
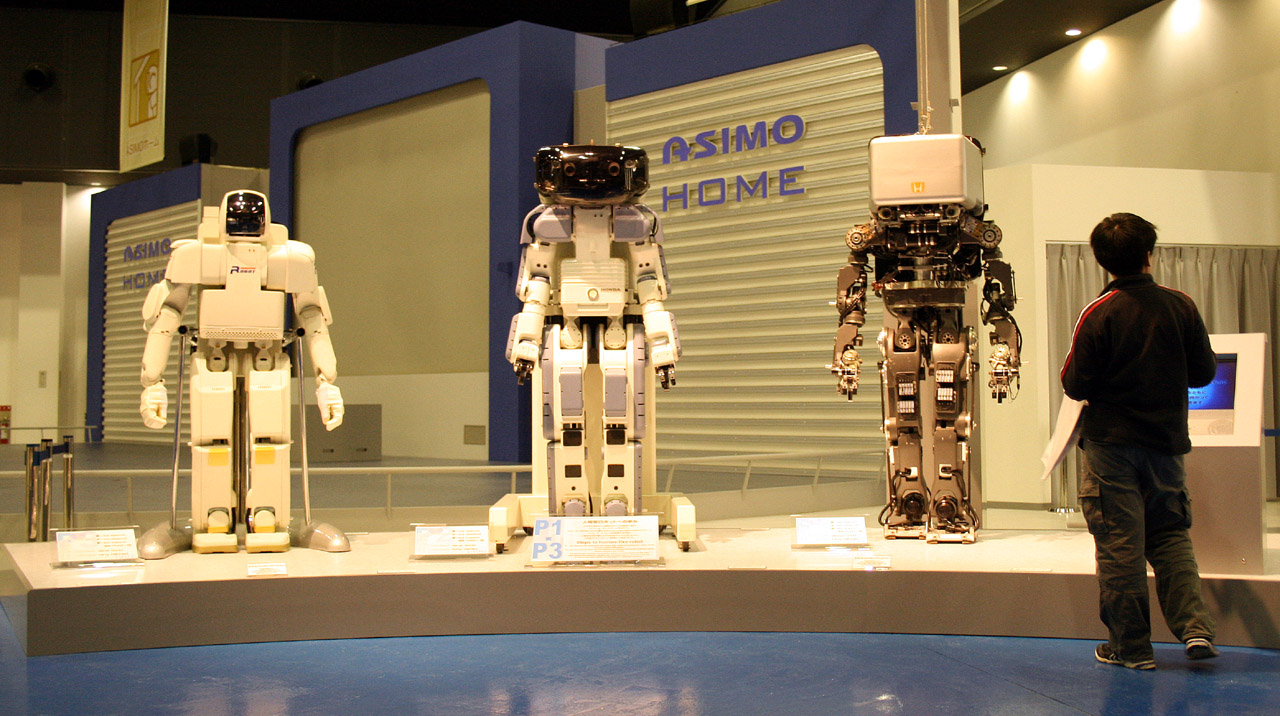
The P1 demonstrated stable bipedal walking, stair climbing, and basic manipulation like turning light switches and grasping doorknobs. It lacked autonomous navigation and relied on tethered computing.
No. The P1 was never a product and is not available for purchase. The few units built are retained by Honda for historical reference. No used market exists.
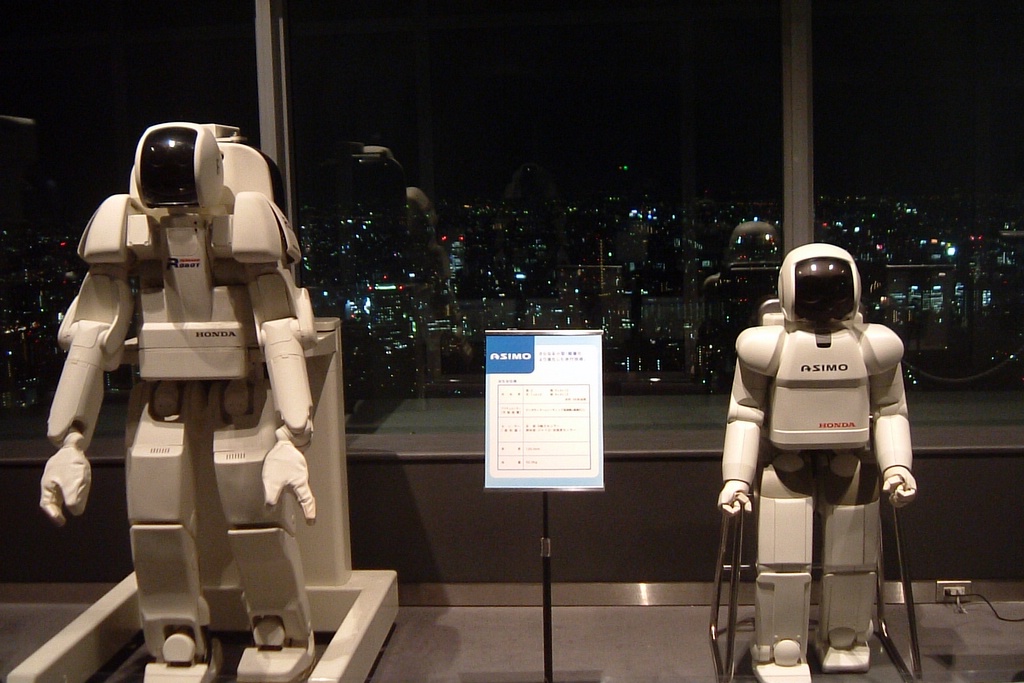
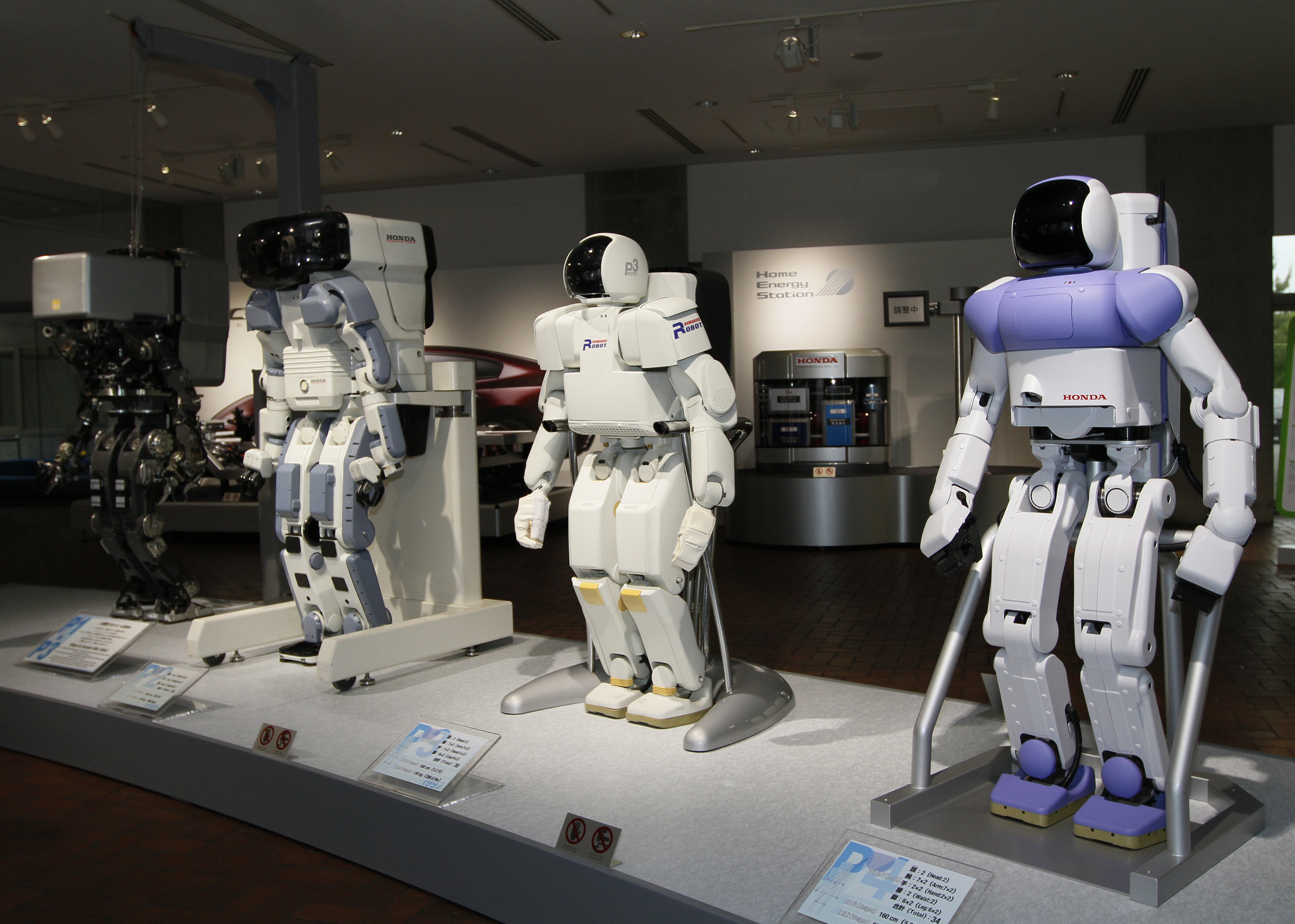
The P1 was tethered, with external power and computing, while the P2 (1996) integrated batteries and an onboard computer for untethered walking. The P2 was shorter (1.82 m) and lighter (210 kg) with an improved control system.
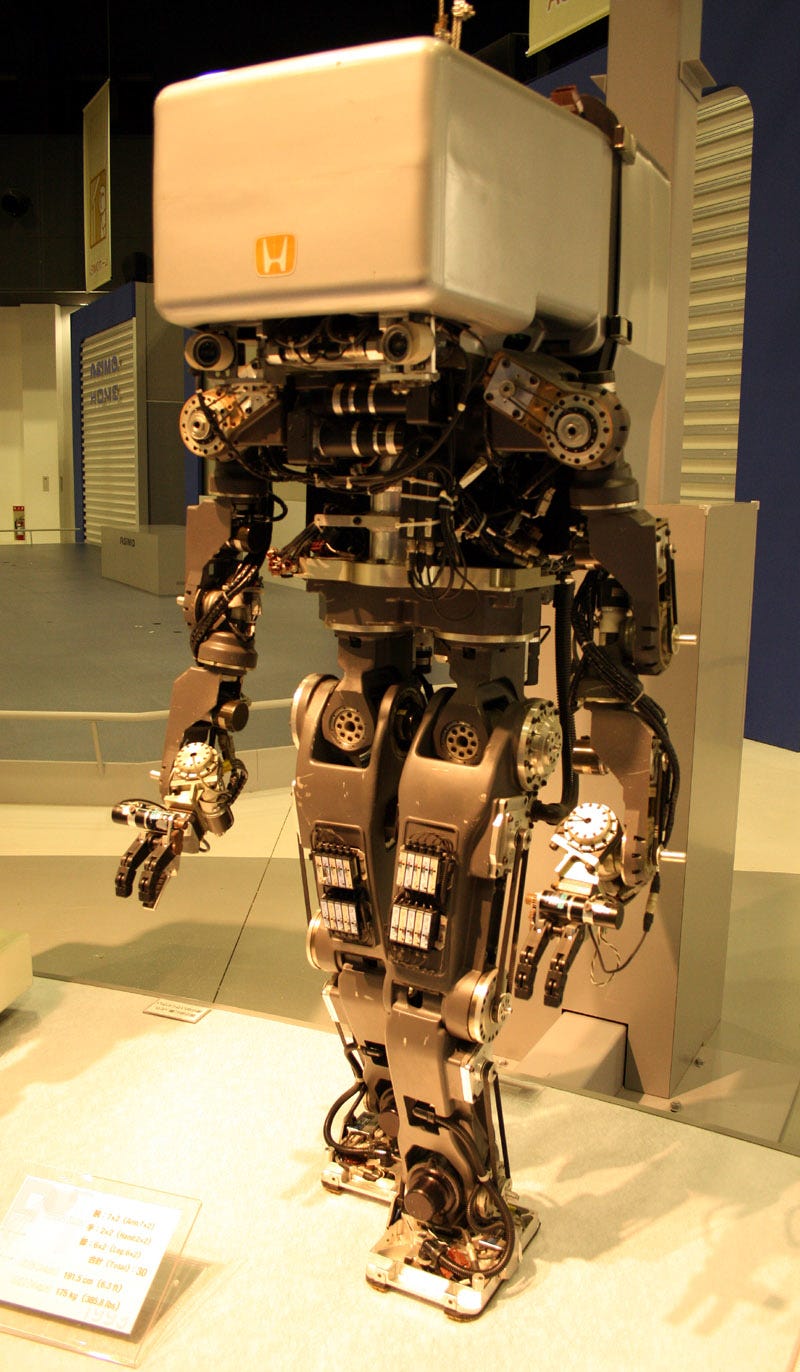
Height: 1.92 m, Weight: 175 kg, 30 DOF, external power, no battery, payload not rated, max speed unpublished. Actuated by DC servo motors with harmonic drives.
The Honda P1 was developed by Honda Motor Co., Ltd., headquartered in Tokyo, Japan (founded 1946). It was built at the company’s Wako Research Center as part of a secret humanoid project starting in 1986.
The P1 had no onboard battery. It relied on an external power supply via tether, so runtime was essentially unlimited as long as connected to the power source and computer.
The P1 was not deployed in any industry. It was a pure research platform for bipedal locomotion development within Honda’s R&D division.
The original P1 is not publicly demonstrated; it is preserved in Honda's collection hall. Its operational status is unknown, but it likely requires original 1990s tethered infrastructure.
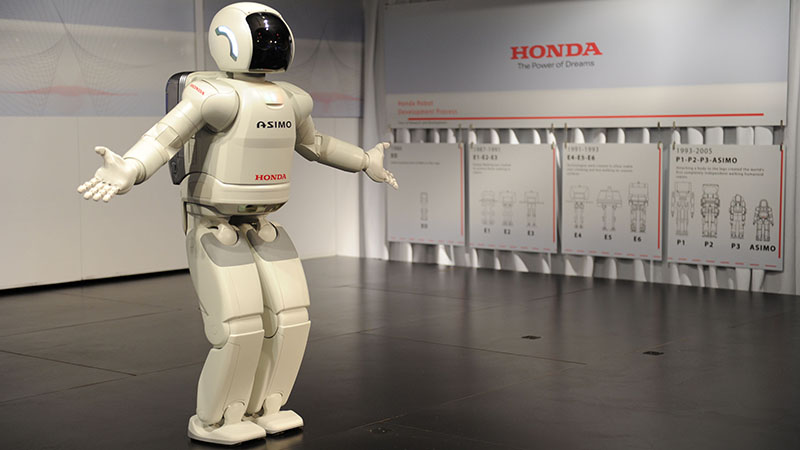
Yes, the P1 led directly to the P2 (1996), then P3 (1997), and ultimately the famous ASIMO (2000). Each successor added more autonomy and compactness.