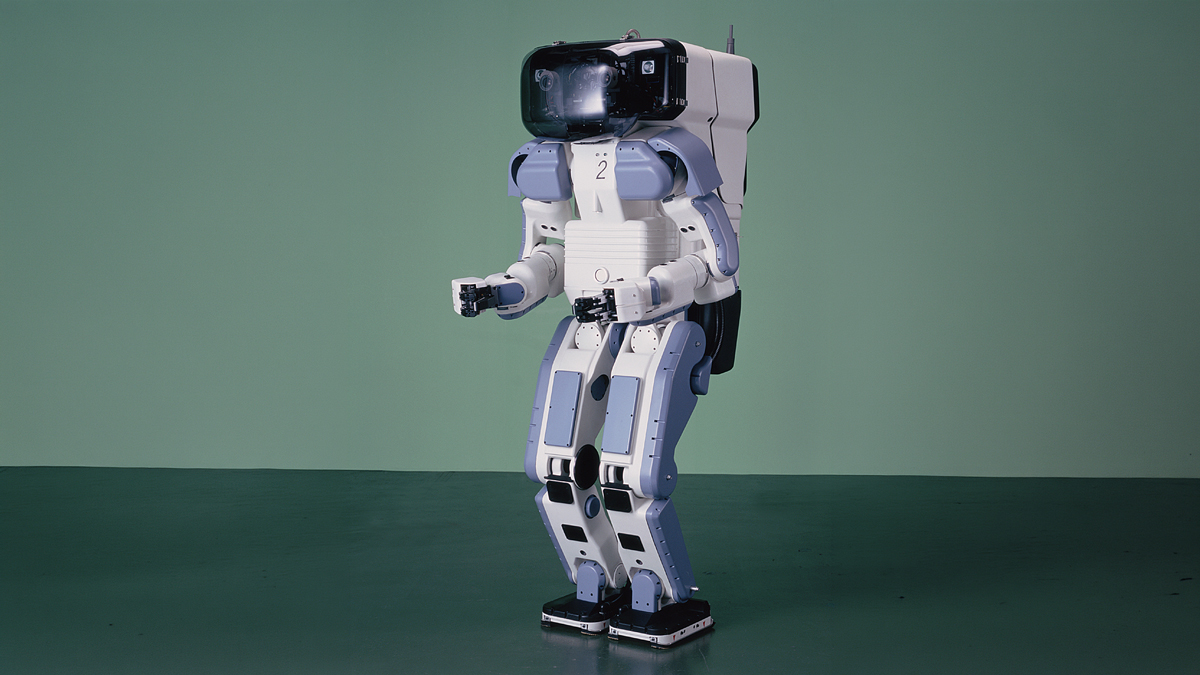
The Honda P2 was never sold commercially. It was a research prototype built in the mid-1990s. No MSRP exists, and any units today are held by museums or Honda’s own collection.
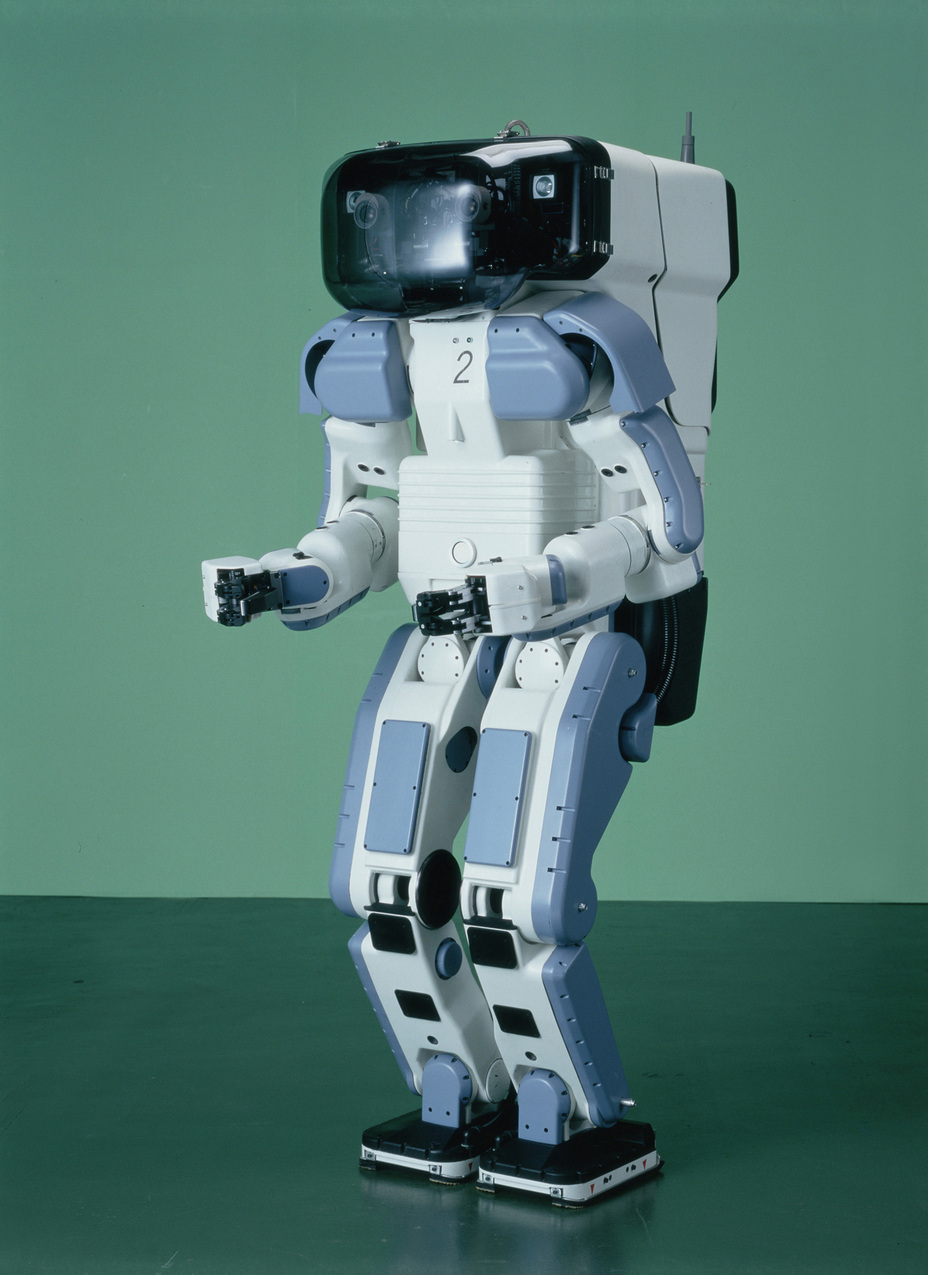
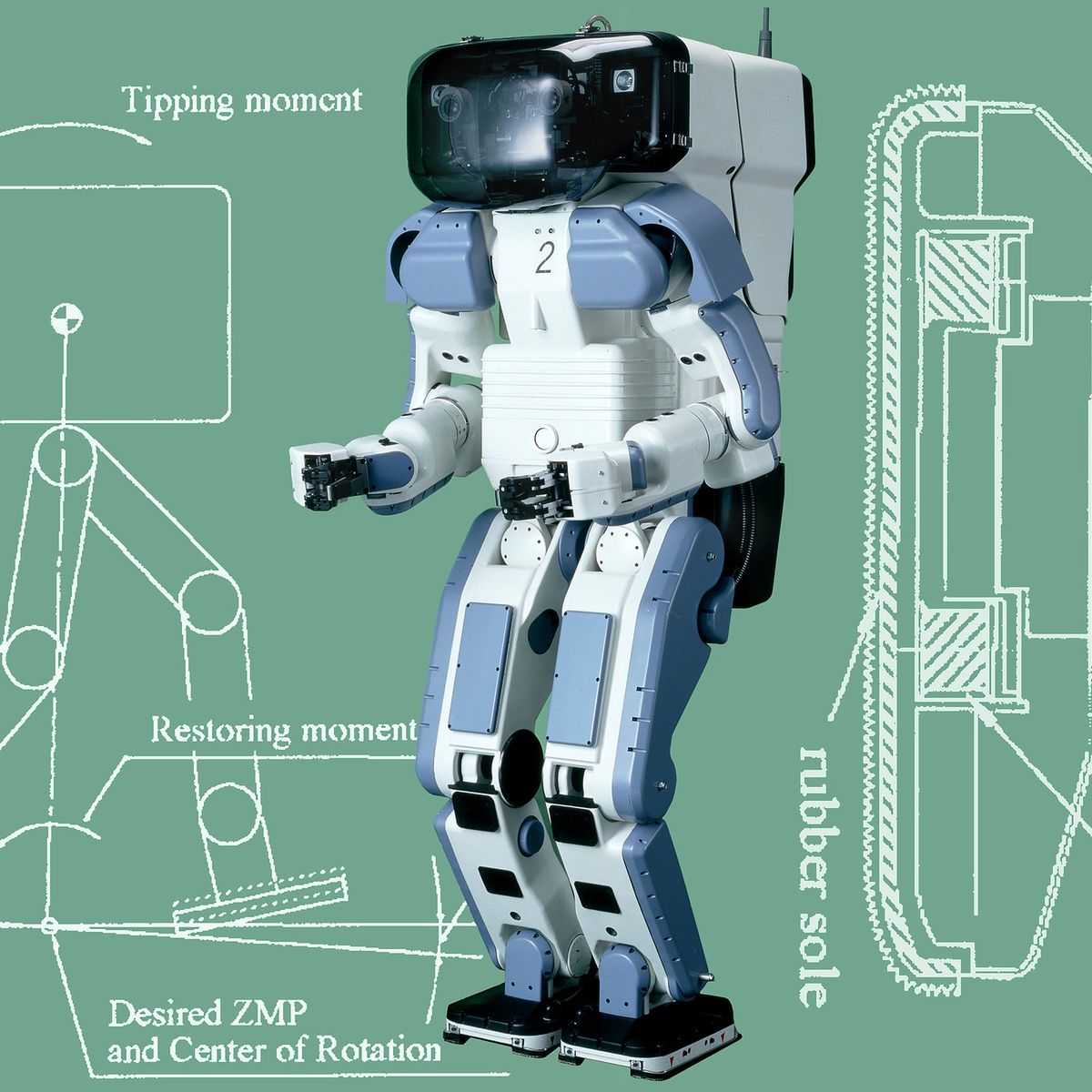
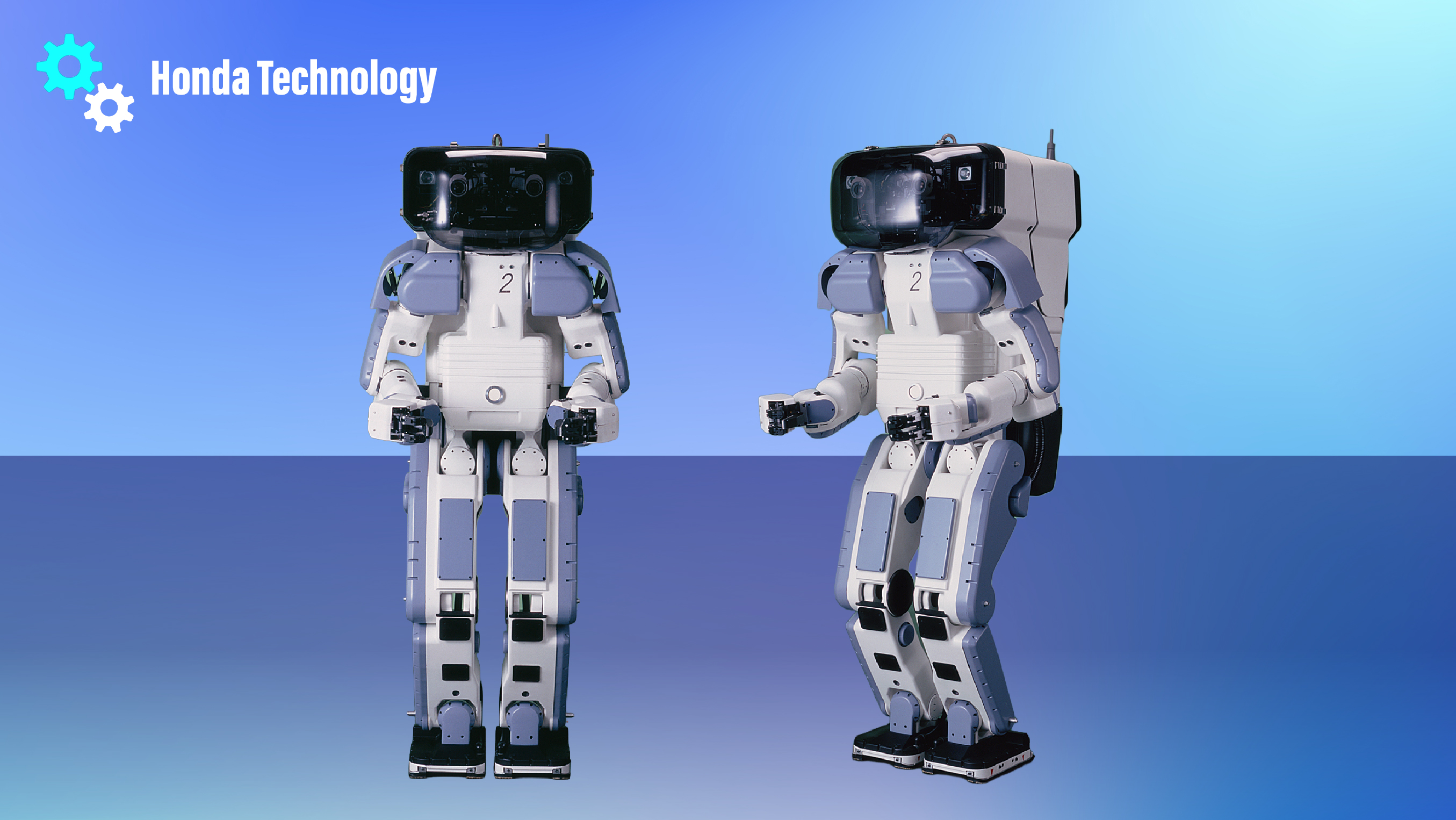
The P2 can walk autonomously on flat surfaces and climb stairs, push a cart, and maintain balance without external tethers. It walks at speeds up to 2 km/h and operates for about 15 minutes on a single charge.
No. The P2 is a discontinued historical prototype and not available for purchase. Some units may be displayed in museums; otherwise, it is no longer in production or distribution.
The P2 is the direct predecessor to ASIMO. While the P2 was large (210 kg, 1.82 m) and slow, ASIMO was much smaller (130 cm, 48 kg) and faster (2.7 km/h walking, up to 9 km/h running for later versions). ASIMO had more advanced computing and smoother motions, building on the P2's foundational technology.
Height: 1.82 m, weight: 210 kg, 30 degrees of freedom, battery life: 15 minutes, max speed: 2 km/h, powered by nickel-zinc batteries, controlled by an onboard proprietary computer.
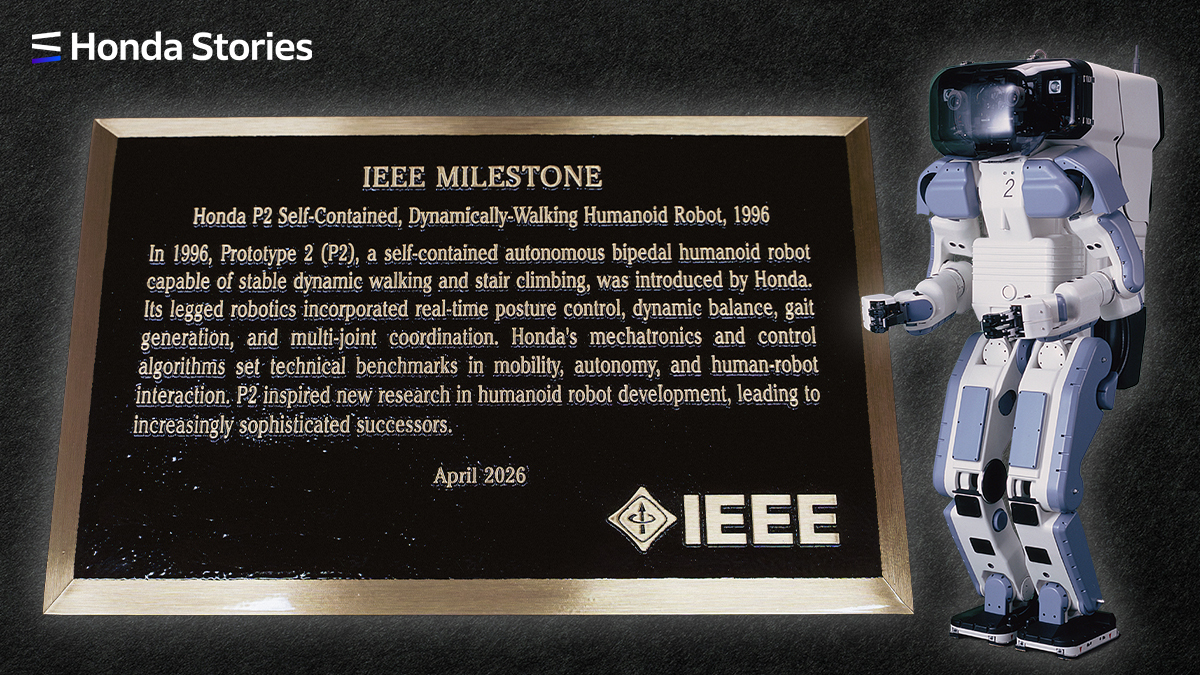
Honda Motor Co., Ltd., headquartered in Tokyo, Japan, developed the P2. Honda founded in 1948, began humanoid robotics research in the late 1980s, and unveiled the P2 in December 1996.
The P2’s battery life is approximately 15 minutes, using a 138V/6Ah nickel-zinc battery pack that weighed about 20 kg. The battery was not swappable in the original design.
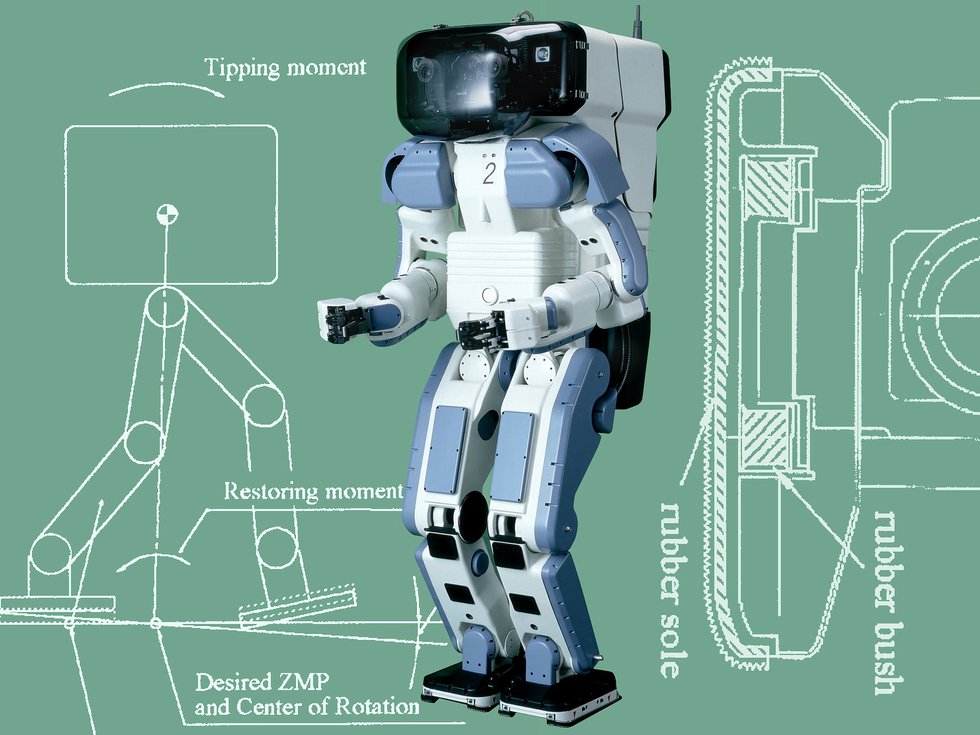
The P2 is an IEEE Milestone robot, recognized as the first autonomous bipedal humanoid. It directly led to the P3 and ASIMO and influenced modern humanoid robotics, proving that self-contained walking was feasible.
The P2 could walk up to 2 km/h (0.56 m/s), which was slow but sufficient to demonstrate stable bipedal gait without external support.
The P2 had 30 degrees of freedom, distributed across its legs, arms, and torso, enabling coordinated walking and basic manipulation tasks.