The Honda P3 was never sold commercially; it was a research prototype with no retail price. No new or used units are available on the open market.
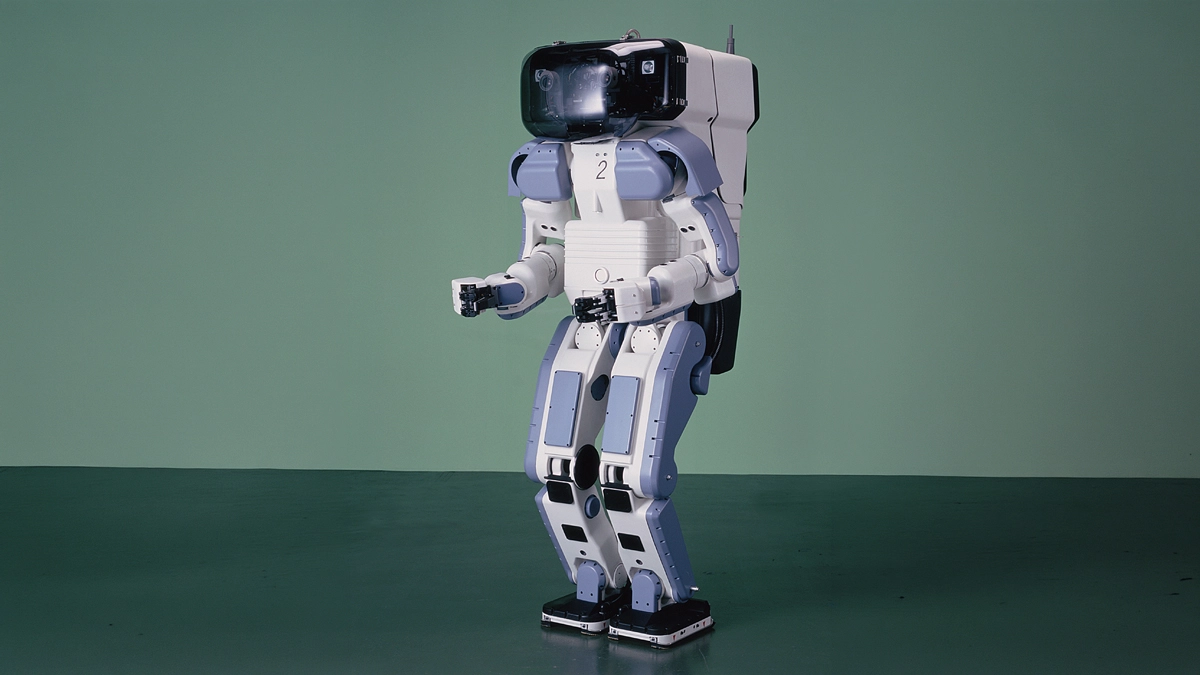
It could walk dynamically at up to 2 km/h, climb stairs, recover from pushes, and perform simple arm gestures. It used stereo cameras and foot sensors for balance but lacked advanced manipulation or speech.
No. The P3 is a discontinued research prototype. It was never commercially released, and no units are currently for sale.
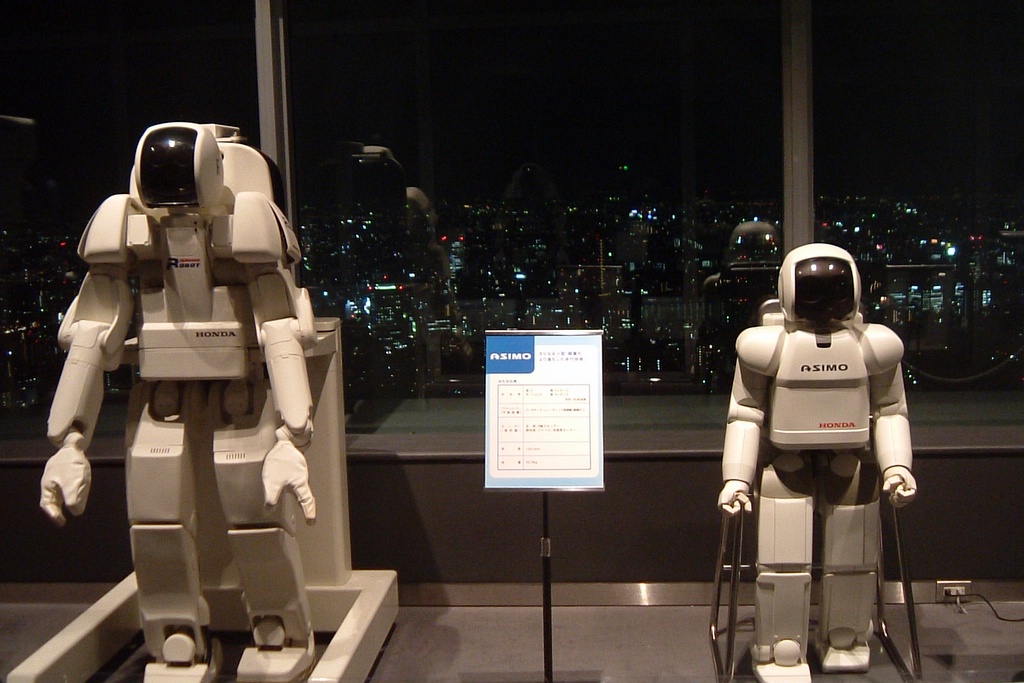
The P3 is ASIMO’s direct predecessor. It was taller (1.60 m vs. 1.30 m), heavier (130 kg vs. ~50 kg), and slower (2 km/h vs. up to 9 km/h). ASIMO added refined walking, running, and social interaction capabilities.
Height: ~1.60 m, weight: ~130 kg, degrees of freedom: 28, battery life: 0.42 hours (25 min), max speed: 2 km/h. Payload was not specified.
Honda Motor Co., headquartered in Tokyo, Japan. The P3 was developed at Honda’s Wako Research Center as part of a secret humanoid robotics program that started in the 1980s.
Approximately 0.42 hours, or about 25 minutes of continuous operation. The battery was internal and non-swappable during operation.
None commercially. It was used exclusively for academic and corporate robotics research, primarily in bipedal locomotion, at facilities like Honda’s labs and AIST in Japan.
Modern humanoids like Unitree H1 or Tesla Optimus offer far greater speed, dexterity, and AI integration at prices up to $150,000 or more. The P3 is obsolete by today’s standards but foundational.
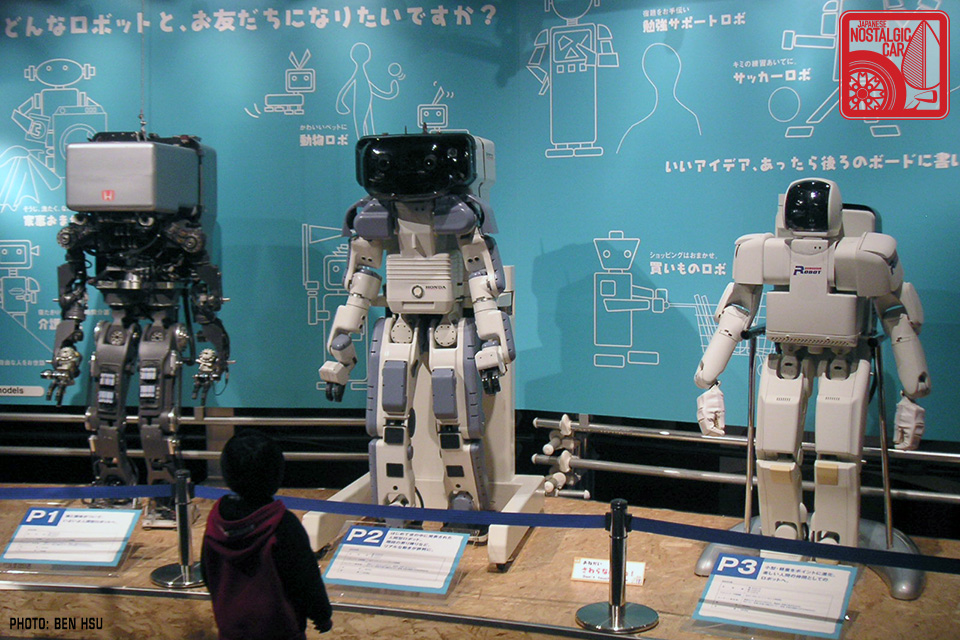
The P3 was unveiled in 1997 as the third prototype in Honda’s P-series, following the P1 (1993) and P2 (1996). It directly preceded the ASIMO program launched in 2000.