A new full iCub is sold by IIT to research partners at approximately €250,000 (~$270,000). An upper-body-only configuration costs about €200,000. Exact pricing depends on options, version, and consortium membership.
iCub is built for cognitive research: object grasping, tool use, human-robot interaction, language grounding, and developmental learning. It walks bipedally (slow, ~0.5 km/h est.), uses stereo vision and binaural hearing, and features full-body capacitive skin.
Yes, but only for academic and research institutions that become part of the iCub consortia. Contact IIT via icub.iit.it for details; typical lead time is 6–12 months.
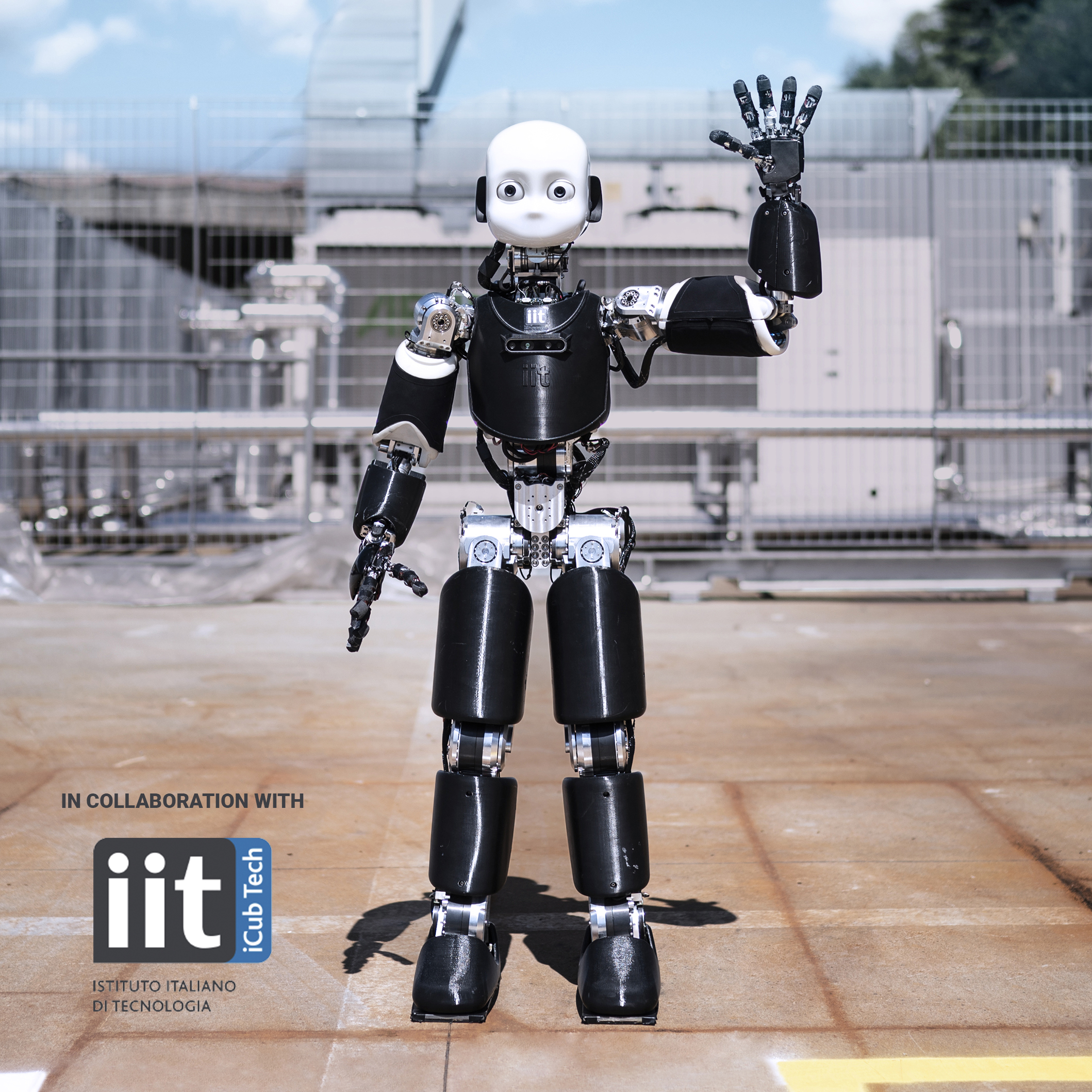
iCub (1.04 m, 53 DOF, $270k) is larger, far more dexterous, and includes tactile skin. NAO (0.58 m, 25 DOF, $9k) is a consumer-available educational robot. iCub is a research instrument, NAO a teaching tool.
Height 1.04 m, weight 33 kg, 53 DOF (18 hand DOF), 1.5‑hour battery (swappable), Intel i7 PC104+ embedded computer, stereo cameras, capacitive skin, 6‑axis force/torque sensors in limbs.
The Italian Institute of Technology (IIT) in Genoa, Italy, developed the iCub as part of the EU RobotCub project. IIT was founded in 2003 and still manages all distribution and software development.
On its custom Li‑Po backpack battery, iCub runs approximately 1.5 hours. It can also be powered via an external 24V DC supply for continuous tethered operation.
Exclusively research and education. Over 40 universities and institutes worldwide use iCub for cognitive science, AI, robotics, and neuroscience. It is not deployed in manufacturing or service industries.
Yes, most hardware CAD files and all software (YARP, ROS wrappers, OpenCV integrations) are open source. Some controller boards and low‑level firmware are proprietary and manufactured solely by IIT.
Occasionally, older iCub 2.0/2.5 units are sold between labs for €100,000–200,000. The best way to find one is through the iCub community mailing list or IIT directly.