NASA never sold the Robonaut commercially; it was a government-funded research project with no public price. Development costs were shared with General Motors and are estimated at over $150 million. No units are available for purchase — it is not a product.
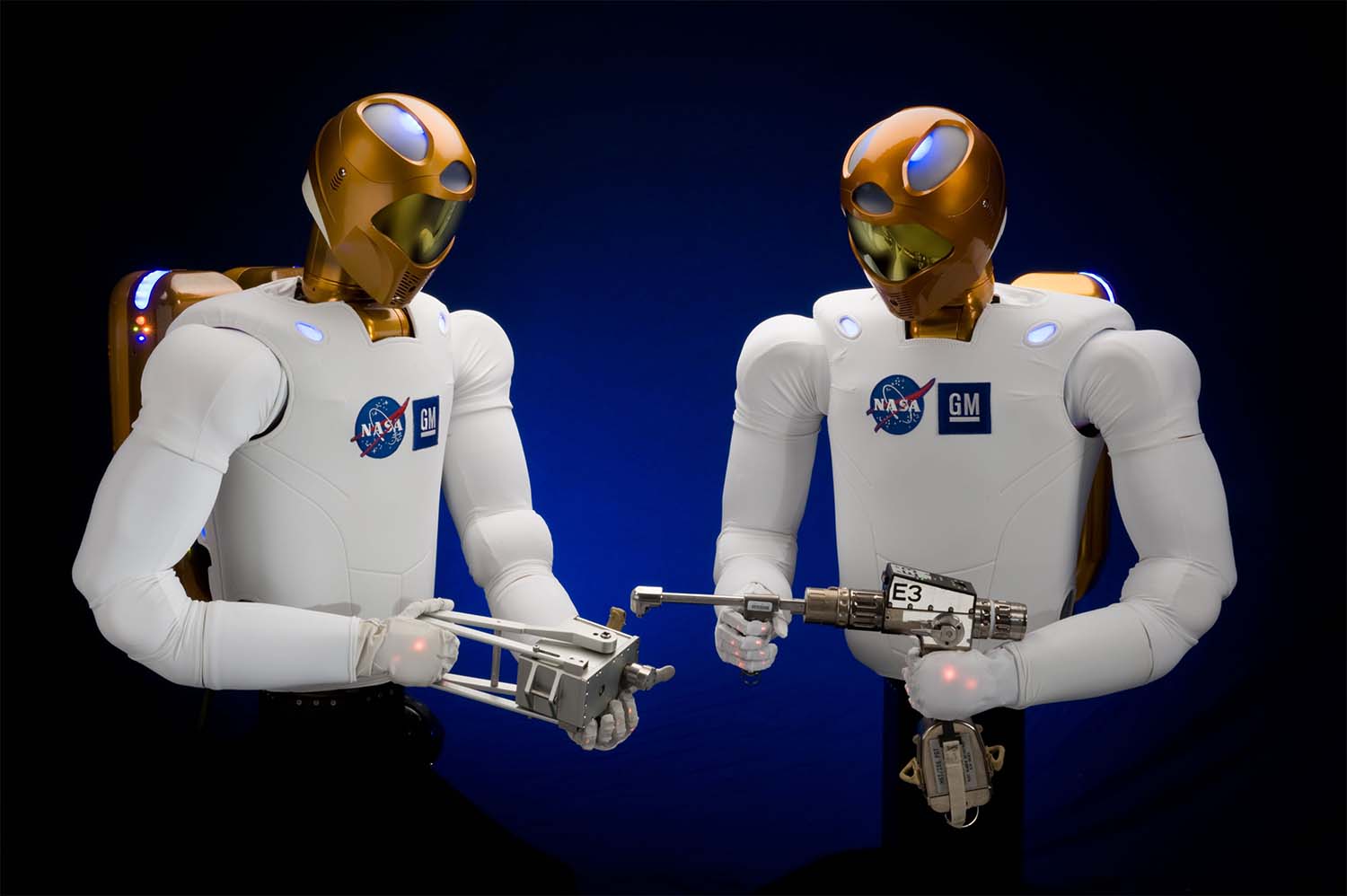
Robonaut 2 is designed for space station maintenance, teleoperation experiments, and astronaut assistance. It can operate valves, handle tools, inspect equipment, and perform delicate manipulation using its 54-degrees-of-freedom dexterous system. In space, it demonstrated handshake and switch-flipping tasks, but its movement speed is slow and it requires constant supervision or teleoperation.
No. The Robonaut is a research-only platform owned by NASA. It was never sold to private companies or individuals. Researchers can partner with NASA or license related patents via the agency’s technology transfer program, but the robot itself cannot be purchased.
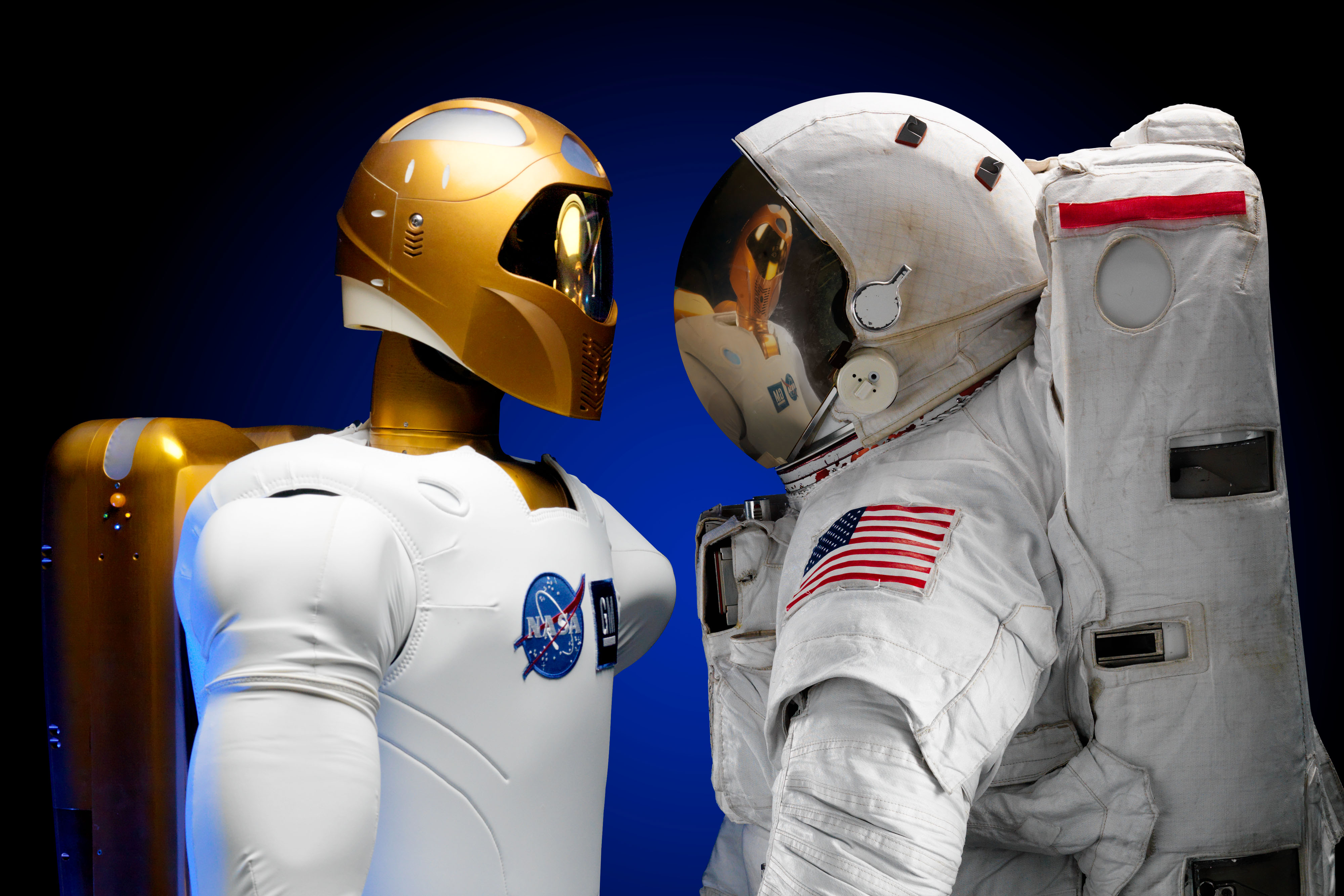
Robonaut is an upper-torso humanoid optimized for microgravity inside a spacecraft, while Valkyrie (R5) is a full bipedal humanoid designed for planetary surface operations and disaster response. Robonaut has 54 DOF and 9 kg arm payload; Valkyrie has 44 DOF and higher payload, with rugged limbs and battery-powered mobility. Both are NASA research platforms, not commercial products.
Robonaut 2 (R2) stands 1,016 mm tall as a torso (2,743 mm with optional legs), weighs 150 kg, has 54 degrees of freedom (7 per arm, 12 per hand, 3 in head, 1 in waist), arm tip speed up to 7.2 km/h, payload 9 kg per arm, and a five-fingered dexterous hand. Battery life is not published; it normally runs tethered.
NASA’s Johnson Space Center in Houston, Texas, developed the Robonaut in partnership with General Motors. The project began in 1997, with Robonaut 1 unveiled in 2000 and the improved Robonaut 2 in 2010. NASA is a U.S. federal agency founded in 1958, specializing in space exploration and aeronautics research.
There is no official battery life specification. Robonaut 2 typically operates while tethered to the International Space Station’s power supply. A battery backpack was developed for untethered movement inside the station, but no hours of runtime have been publicly disclosed. In ground testing, operation time depends on the auxiliary battery pack’s capacity and the robot’s workload.
Robonaut is used exclusively in space exploration and research. Its only operational deployment has been aboard the International Space Station by NASA. Ground versions are used by NASA and academic partners for teleoperation studies and dexterous manipulation research. No industrial or commercial deployments exist.
The base Robonaut 2 is an upper torso without legs. NASA later developed a leg module that allows it to climb handrails and move inside the space station, but not walk bipedally on Earth. The leg system consists of stretchable limbs with end effectors for gripping station holds, not feet.
Robonaut 2 was launched to the ISS in 2011 and performed several demonstrations. In 2015, it experienced a power fault in its torso computer, and attempts to repair it in orbit were unsuccessful. In 2018, R2 was returned to Earth on a SpaceX Dragon capsule for refurbishment. As of 2026, it has been succeeded by ground-based testbeds and the Valkyrie program.