Valkyrie has no commercial price. The original 2013 prototypes cost approximately $2 million each to build, but NASA does not sell the robot. Academic partners receive units through no‑cost loan agreements for collaborative research.
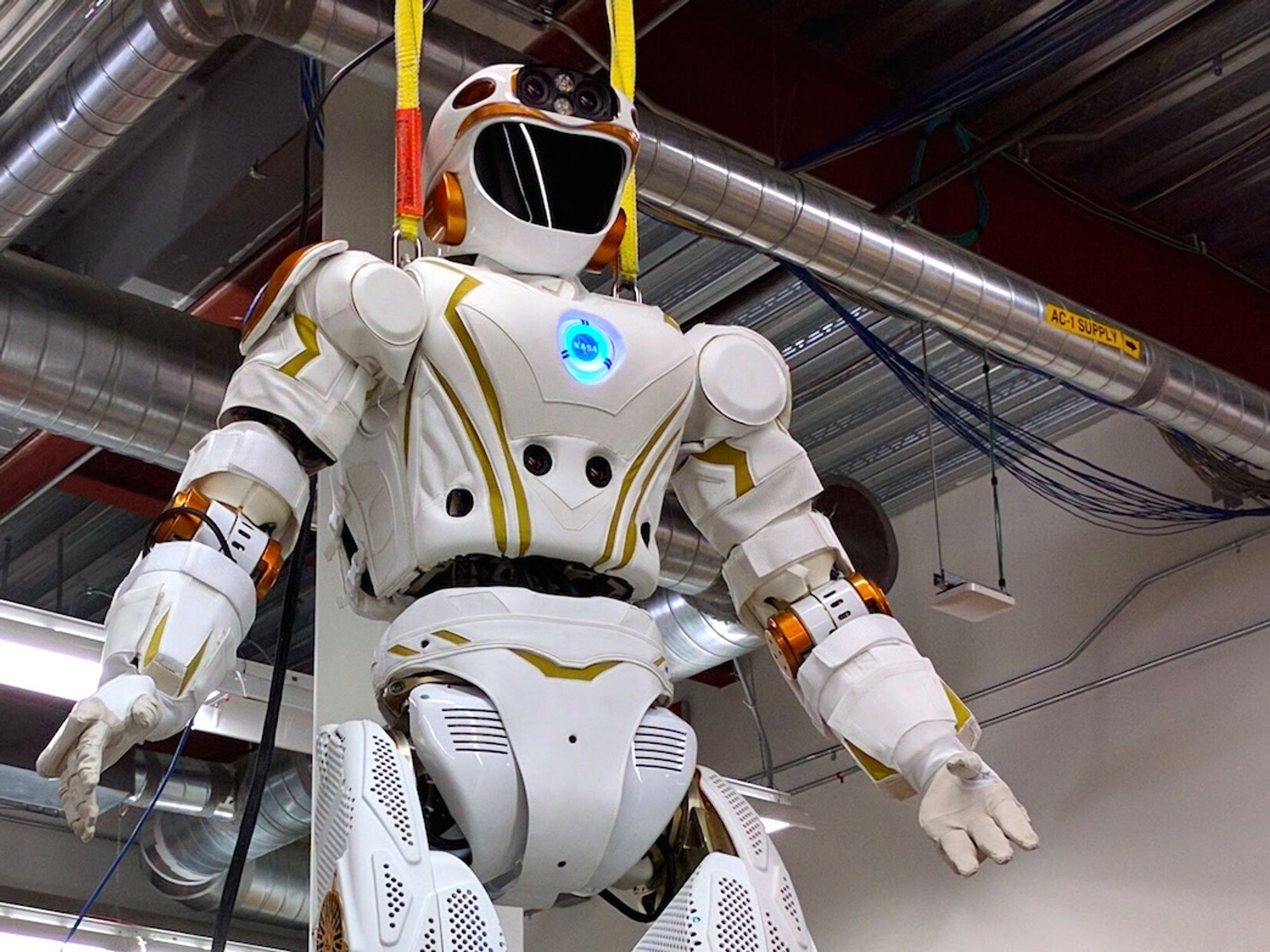
Valkyrie can walk at up to 1.8 km/h, manipulate tools with 44 DOF including 4-fingered hands, and perceive its environment via stereo cameras, LiDAR, and structured light. It is used in research for valve turning, panel operation, ladder climbing, and supervised autonomy tasks.
No. Valkyrie is a research platform only. NASA loans units to partner institutions but does not sell them. There is no waiting list or purchase process for commercial entities.
Both are full‑size humanoid research platforms. Atlas uses hydraulic actuators for explosive, dynamic movements; Valkyrie uses electric series elastic actuators for safer interaction and precise force control. Atlas excels at locomotion acrobatics; Valkyrie is designed for dual‑arm manipulation and space‑grade sensing.
Height: 1.88 m, weight: 127 kg, 44 degrees of freedom, 1‑hour battery life, max speed 1.8 km/h, payload not officially rated. Sensors include Carnegie Robotics Multisense SL (stereo + LiDAR), infrared projectors, and 6‑DOF force/torque at wrists and ankles.
Valkyrie is built and maintained by the NASA Johnson Space Center in Houston, Texas, with original design work starting in 2013. It has been supported by NASA’s Space Technology Mission Directorate.
Valkyrie operates for about 1 hour on a single battery charge. The battery is not hot‑swappable, limiting continuous untethered use. Charging time is not publicly documented but typically requires full shutdown.
Primarily space exploration and academic robotics. NASA uses Valkyrie for developing autonomous habitat maintenance technologies. Partner universities apply it to disaster response research, human‑robot collaboration, and whole‑body control. It is not used in any commercial industry.