DRC-HUBO was never sold commercially. Development costs were covered by DARPA and KAIST, likely in the multi‑million‑dollar range. No new or used units are publicly available for purchase.
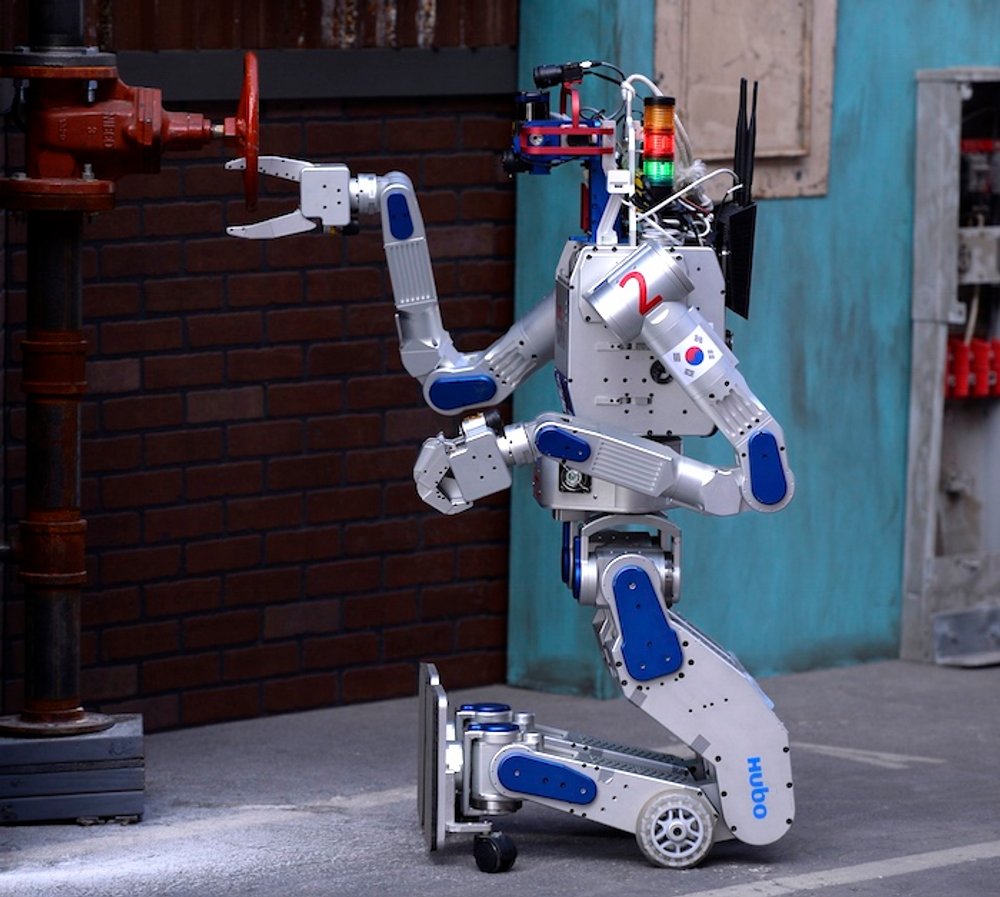
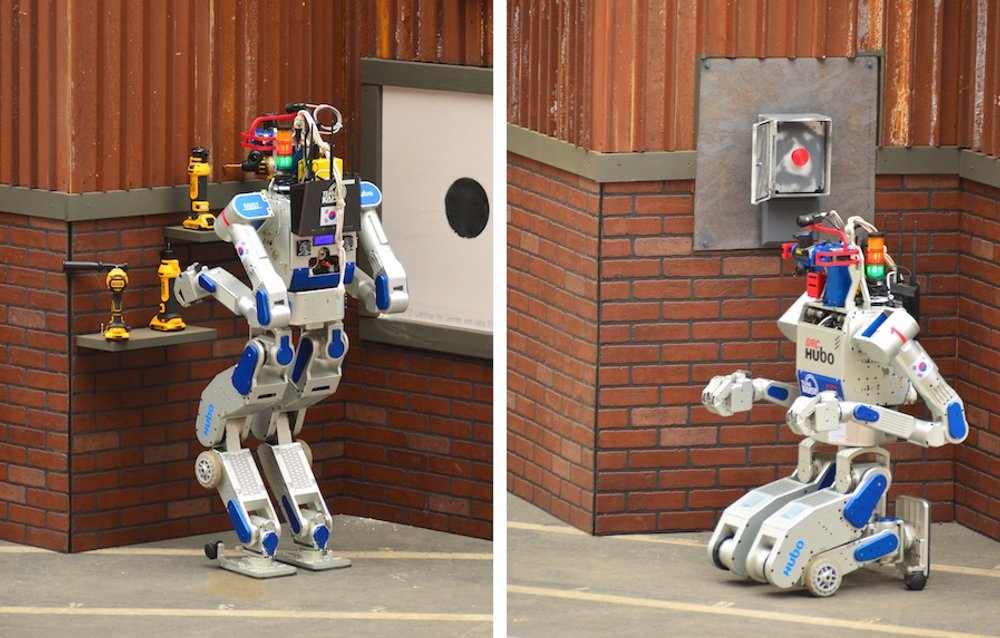
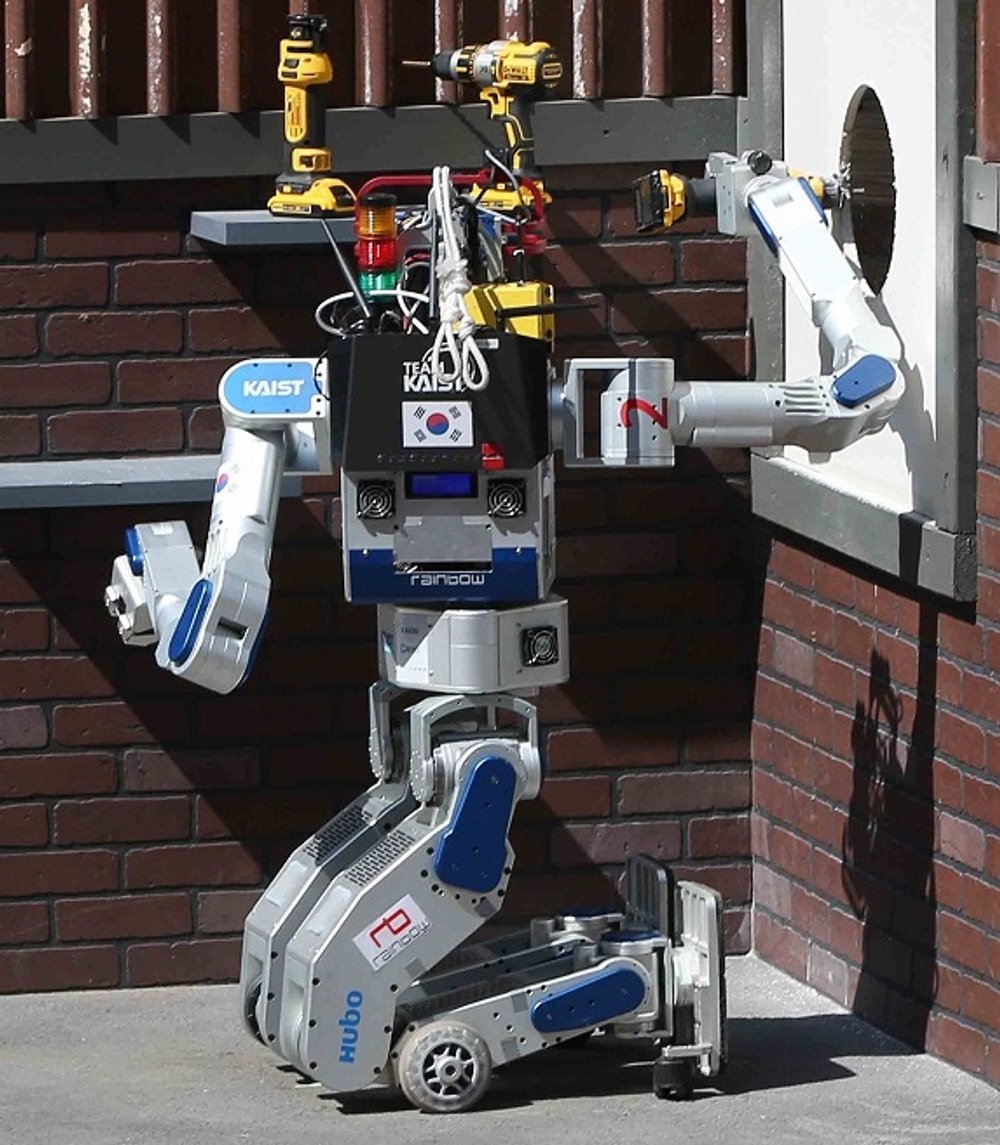
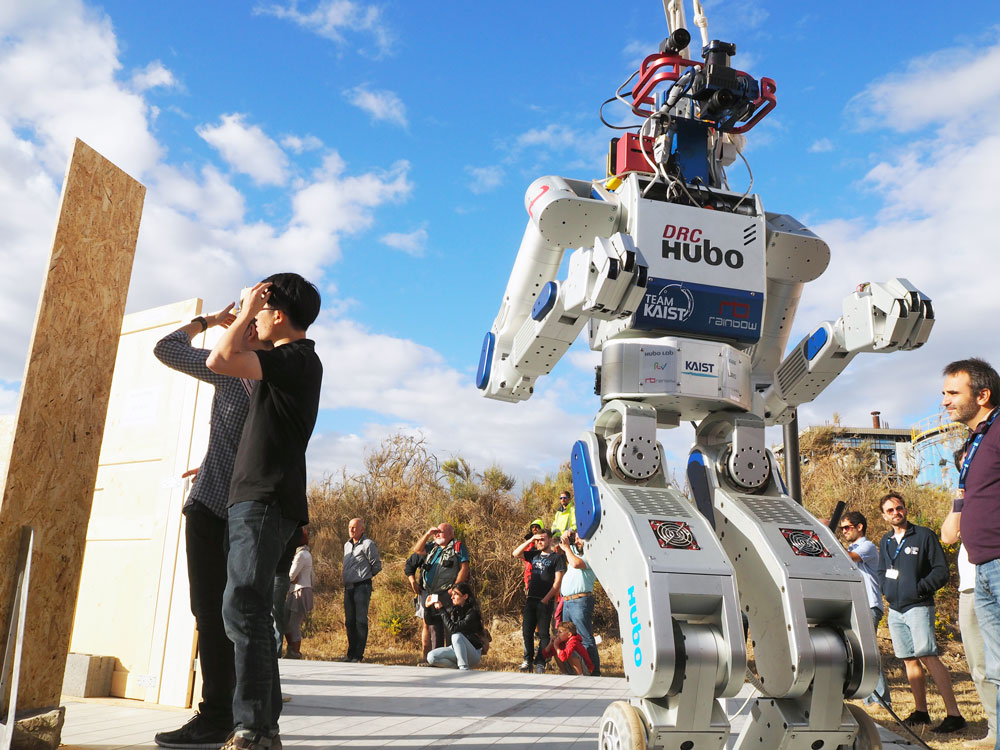
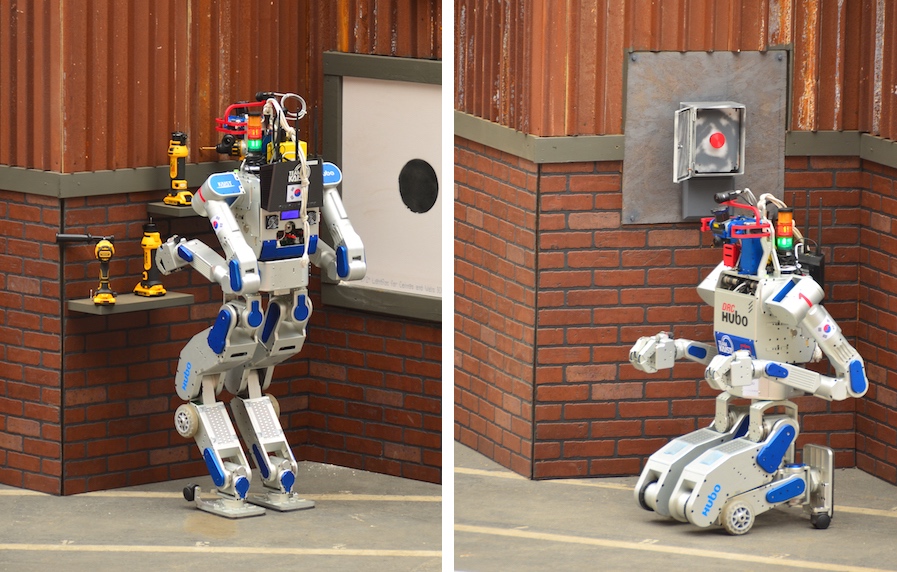
It can walk bipedally, kneel and drive on knee wheels, climb stairs, open doors, turn valves, cut drywall, and drive a vehicle. All tasks were demonstrated under human teleoperation with advanced balance and manipulation control.
No. It was a one‑off research prototype built for the 2015 DARPA Robotics Challenge. No commercial units exist; any secondary sale would be of decommissioned lab hardware and is extremely rare.
DRC-HUBO uses wheels on knees for fast flat‑ground movement, while Atlas is a purely hydraulic biped with greater over‑rough‑terrain agility. DRC-HUBO won the 2015 DRC due to speed; Atlas excels in dynamic balancing and parkour‑like maneuvers.
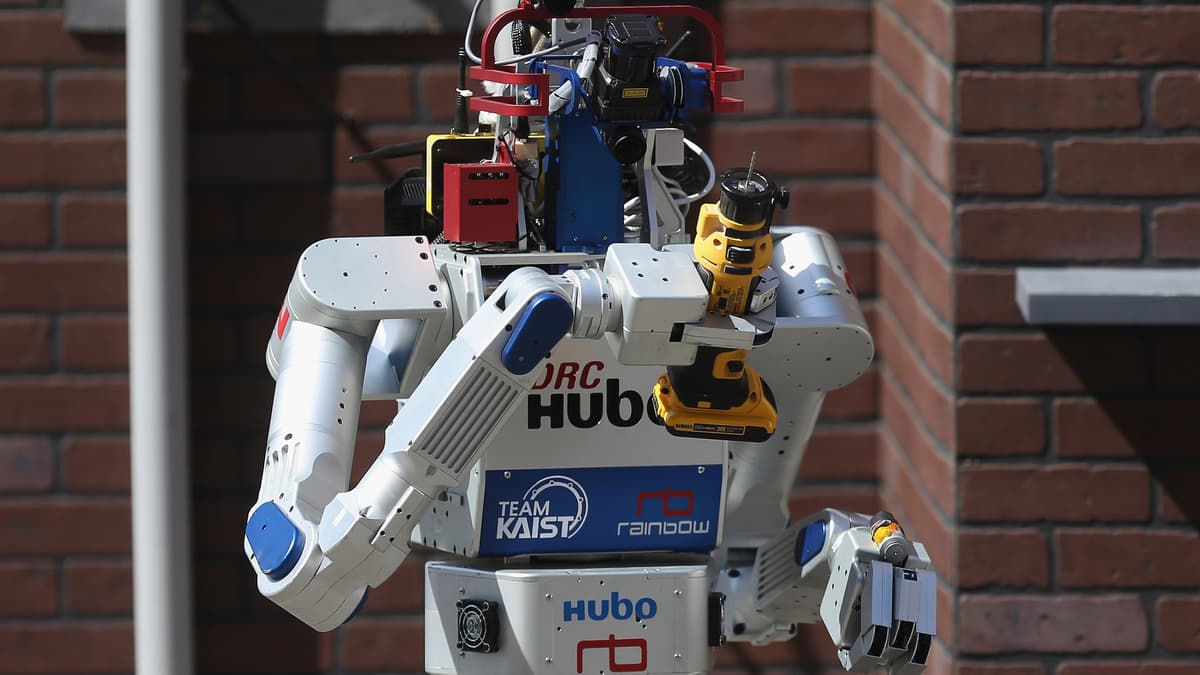
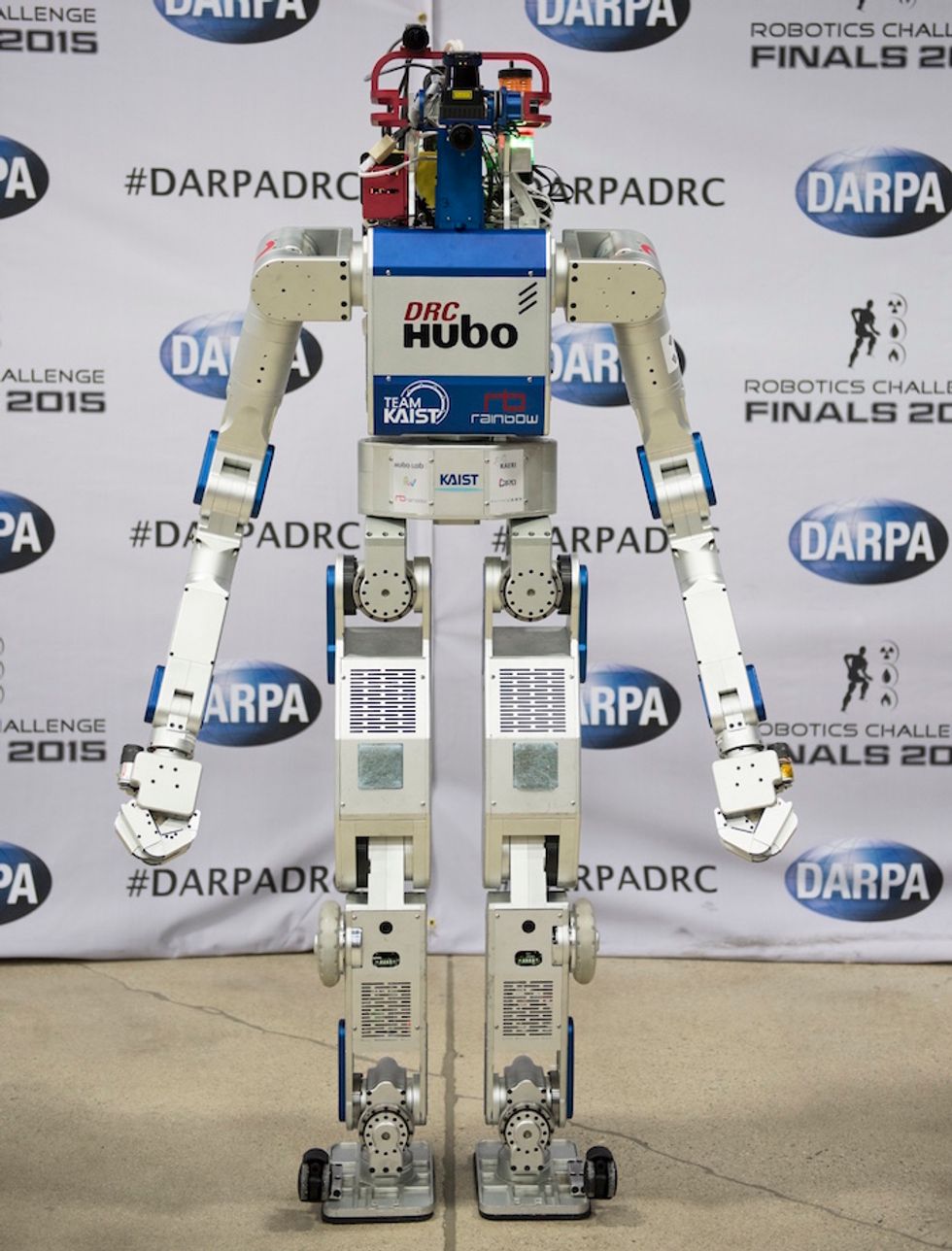
147 cm tall, 60 kg weight, 41 degrees of freedom, 20 kg standing payload, Dynamixel/harmonic‑drive actuators, stereo cameras, LIDAR, IMU, dual Intel i7/NVIDIA GPU compute, Ubuntu with ROS.
It was designed and built by Team KAIST at the Korea Advanced Institute of Science and Technology (Daejeon, South Korea), led by Prof. Jun‑Ho Oh. It is not a product of Rainbow Robotics, despite occasional misattribution.
Battery runtime was not officially published. As a competition robot of 2015, it likely operated for less than an hour of intense mixed mobility/manipulation tasks, typical for DARPA Robotics Challenge entrants.
It is used exclusively in academic research, mainly at KAIST and partner universities, for studying hybrid wheel‑bipedal locomotion, whole‑body control, and human‑robot interaction. No industrial deployments exist.