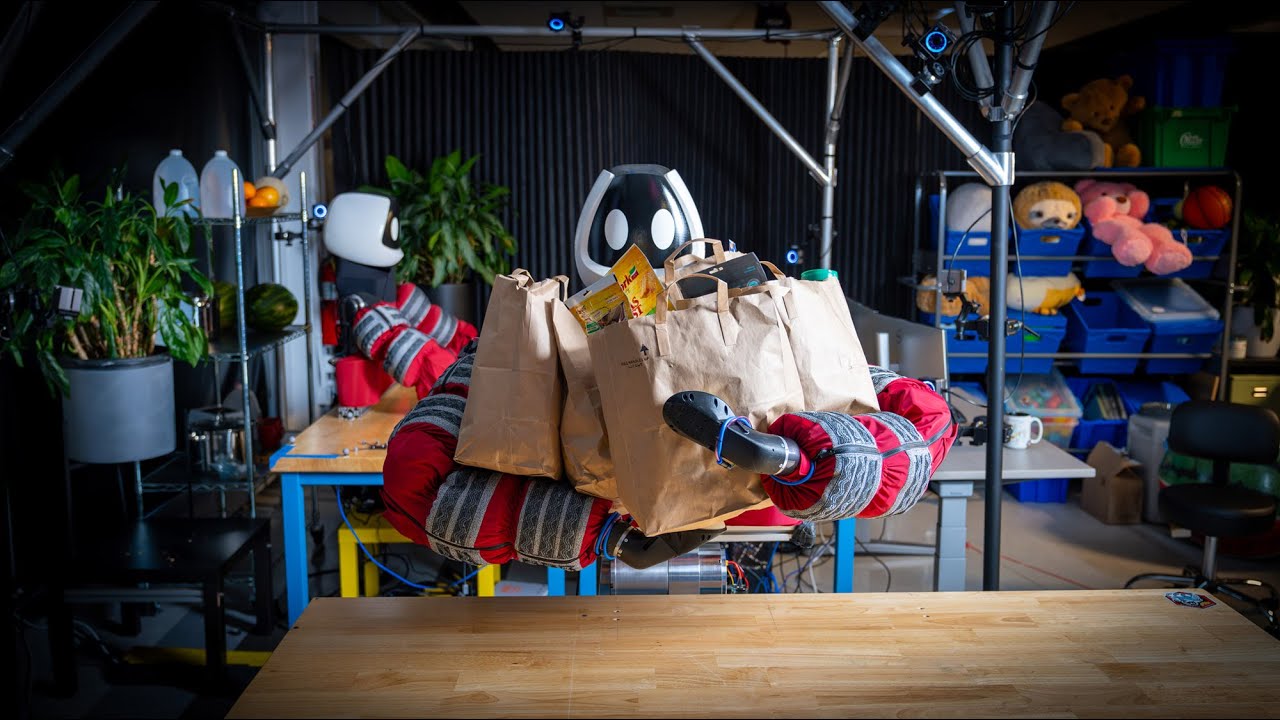
Punyo 是丰田研究所(TRI)于2024年初推出的一款软体人形机器人研究平台。其名称源自日语词汇"punyo"(ぷにょ),形容柔软、可爱且富有弹性的触感。Punyo 旨在探索全身操控的概念——即机器人应像人类一样,利用胸部、手臂和髋部协同搬运大件物品,而非仅依赖手掌与指尖。它是一个无下肢的躯干式人形机器人,体现了 TRI 对未来安全、实用的家用机器人的愿景。
可用性
Punyo 是一个研究平台,而非产品——无定价或购买渠道。TRI 明确将其定义为用于全身操控研究的机器人,与 TRI 在精细指尖灵巧性方面的独立研究互补。TRI 阐述了该概念的设计目标:柔软、可交互、经济、安全、耐用且功能强大。
The Toyota Punyo is not for sale; it is a research prototype. No pricing is disclosed. If you are a research institution, contact Toyota Research Institute for potential collaboration.
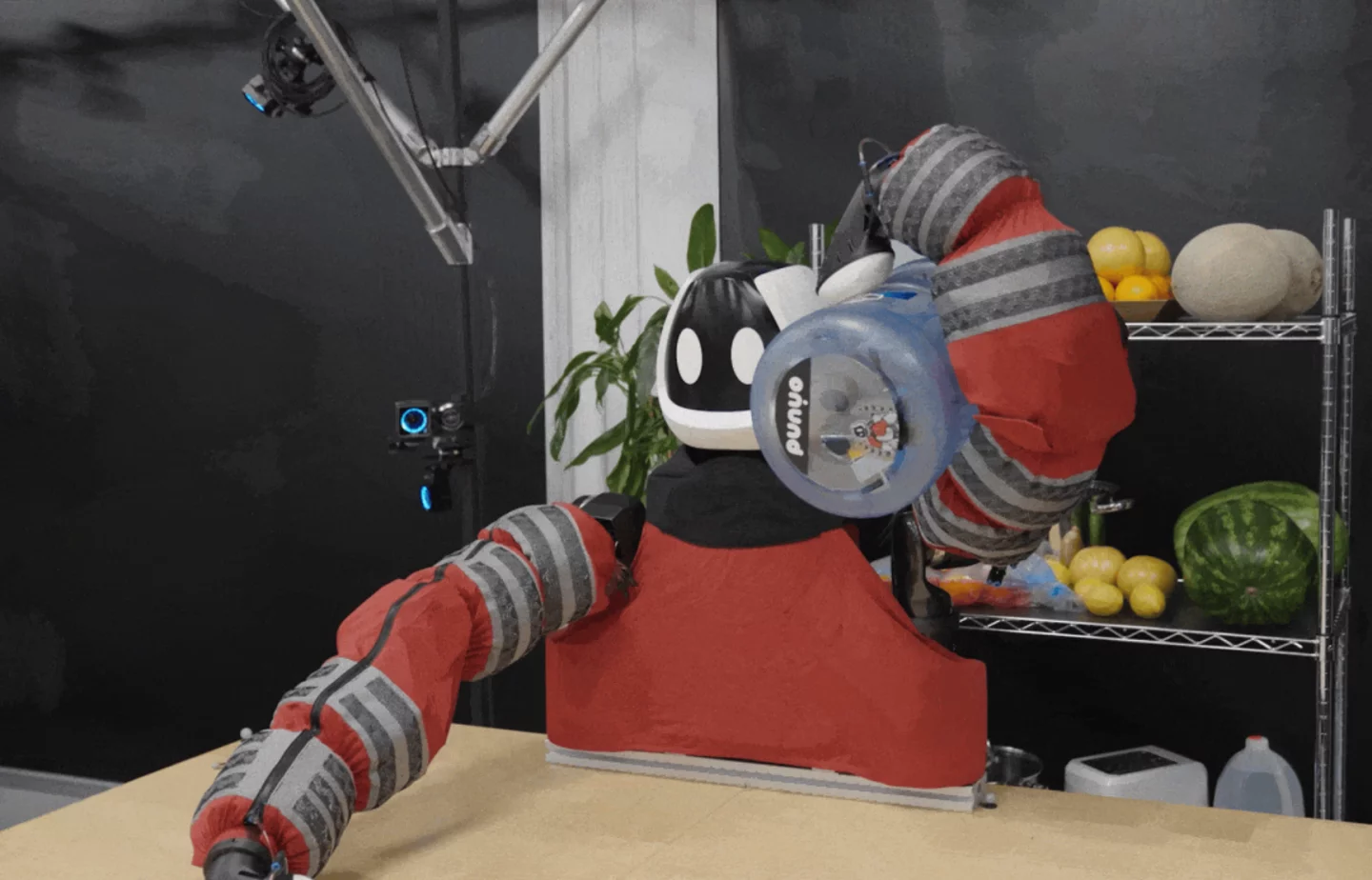
Punyo performs whole-body manipulation, such as lifting and carrying large objects using its torso, arms, and soft grippers. Its soft air-bladder exterior allows safe physical contact with humans.
No. Punyo is available only for internal TRI research. It is not offered to the public or commercial customers.
HSR is a mobile manipulator with a rigid body designed for fetching tasks, priced around $100,000 USD (est.). Punyo is stationary, soft-bodied, and focused on whole-body manipulation rather than mobility.
53 degrees of freedom, 2000 mm height, soft inflatable body, RGB-D and tactile sensors, electric actuation under a compliant exterior. Weight, payload, and battery life are not publicly specified.
Toyota Research Institute (TRI), a subsidiary of Toyota Motor Corporation, headquartered in Toyota City, Japan. TRI was founded in 2015.
Battery life is not disclosed. As a stationary research platform, it may operate tethered to a power source.
Primarily academic and corporate research labs investigating home robotics, elderly care, and safe human-robot interaction.