The T-HR3 is not for sale; it is a research-only platform. Toyota has never announced a commercial price or purchase option.
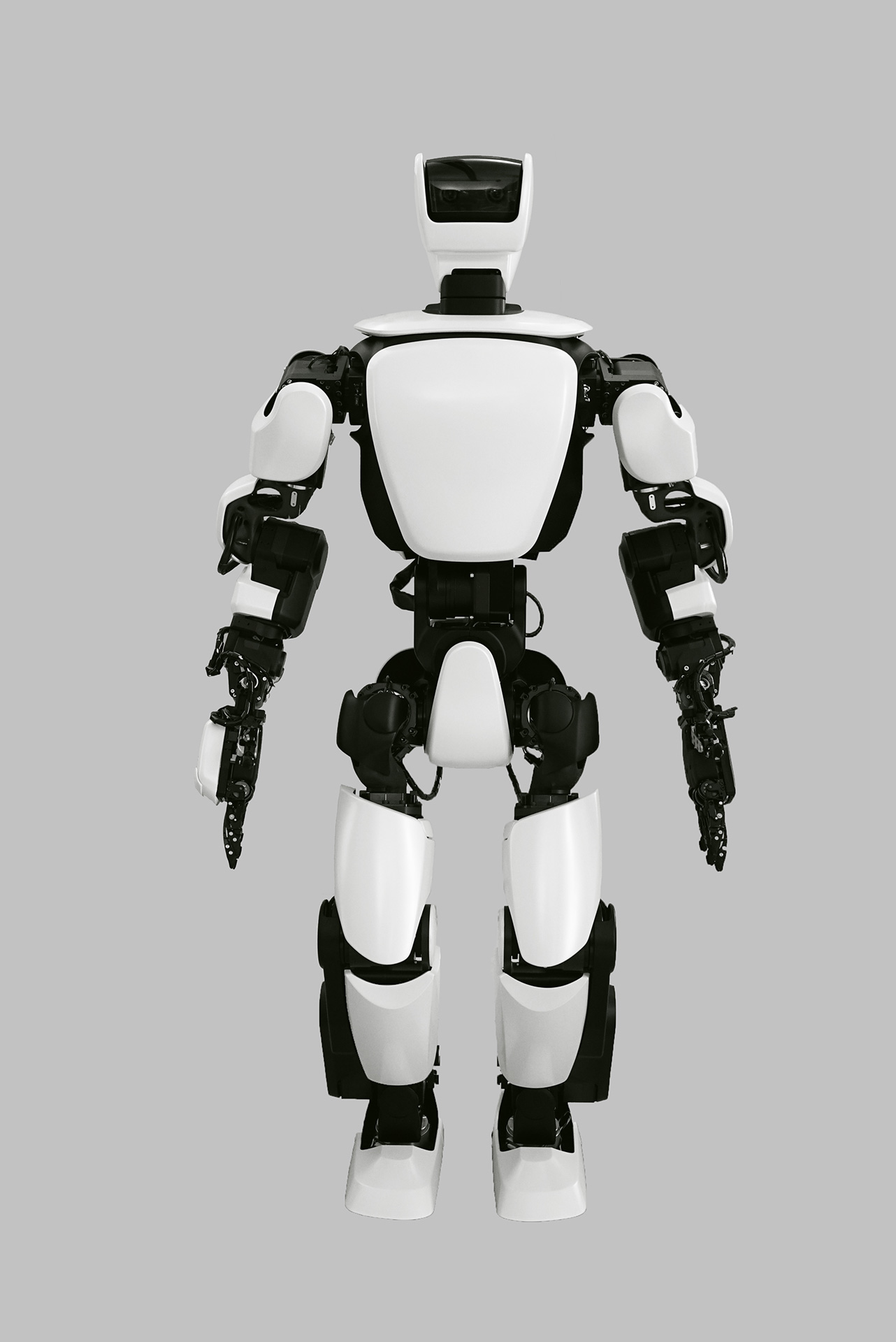
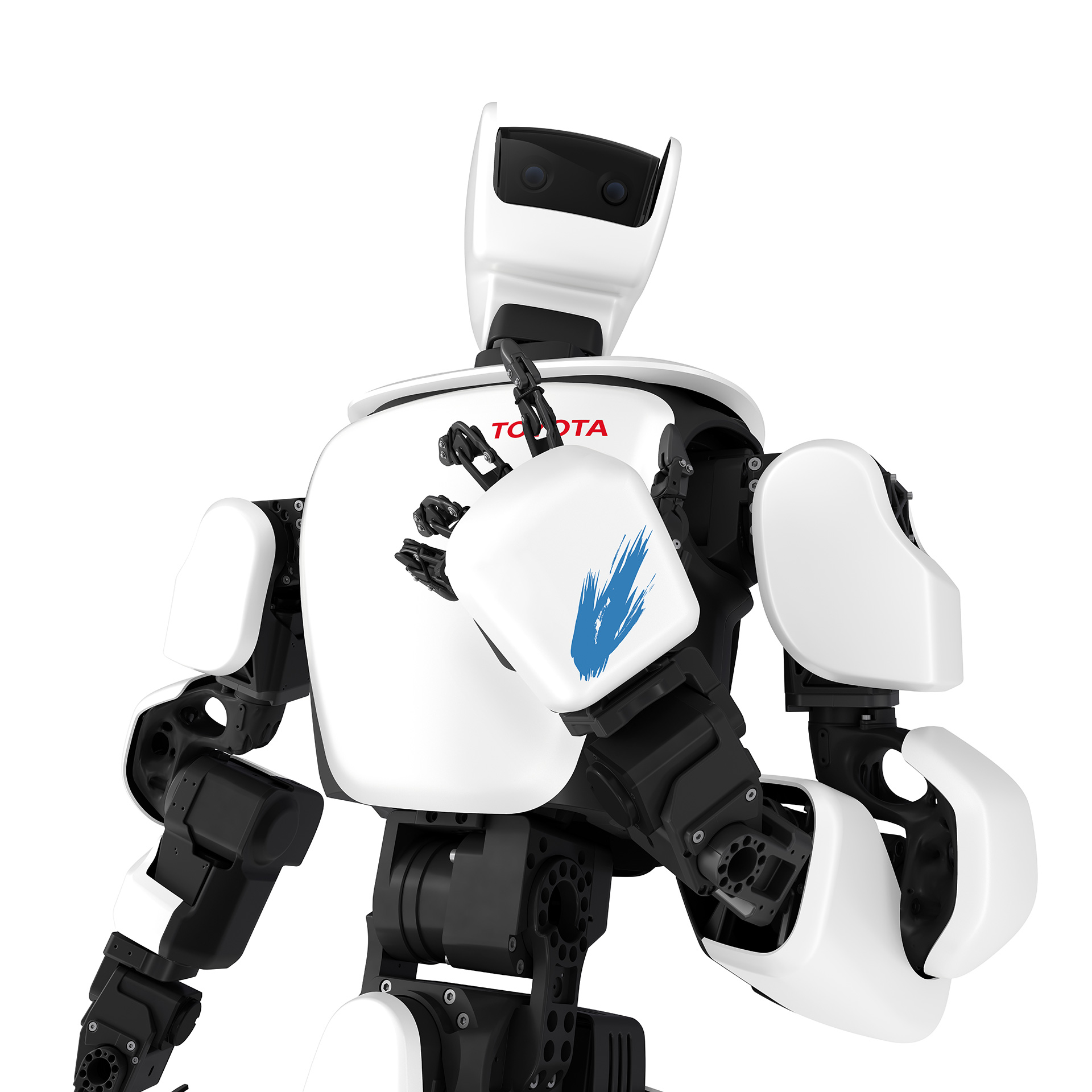
It can mirror an operator’s body movements in real time, including walking, balancing, and dexterous two-handed manipulation. With 29 degrees of freedom and force feedback, the robot can perform delicate tasks like handling tools, moving objects, and adjusting valves. Toyota has demonstrated it shooting a basketball, picking up fragile items, and using power tools.
No. It is strictly a research platform used within Toyota and partner institutions. There are no sales channels, leasing options, or public licensing.
Atlas is a fully autonomous humanoid optimized for dynamic mobility and acrobatics. The T-HR3 is a telepresence avatar, reliant on a human operator, with dexterous force-feedback manipulation. They serve completely different research goals.
Height: 1540 mm, weight: 75 kg, 29 torque-controlled degrees of freedom, stereo camera, force/torque sensors, IMU. Battery life and payload are not officially published.
Toyota Motor Corporation, headquartered in Toyota City, Aichi, Japan. Founded in 1937, Toyota is best known as an automotive manufacturer but has been developing humanoid robots since the early 2000s.
Toyota has not publicly disclosed the battery life or runtime of the T-HR3. Given its tethered power demonstration history, the robot likely requires external power for extended operation, but exact numbers are unavailable.
Target industries include research (human-robot interaction), healthcare (remote nursing/surgery), construction (remote assembly), and disaster response (hazardous environment manipulation). All uses are experimental.
No, the T-HR3 is not designed for autonomous operation. It requires a human operator to wear the master control system, which captures full-body motion and provides force feedback. It lacks autonomous decision-making capabilities.