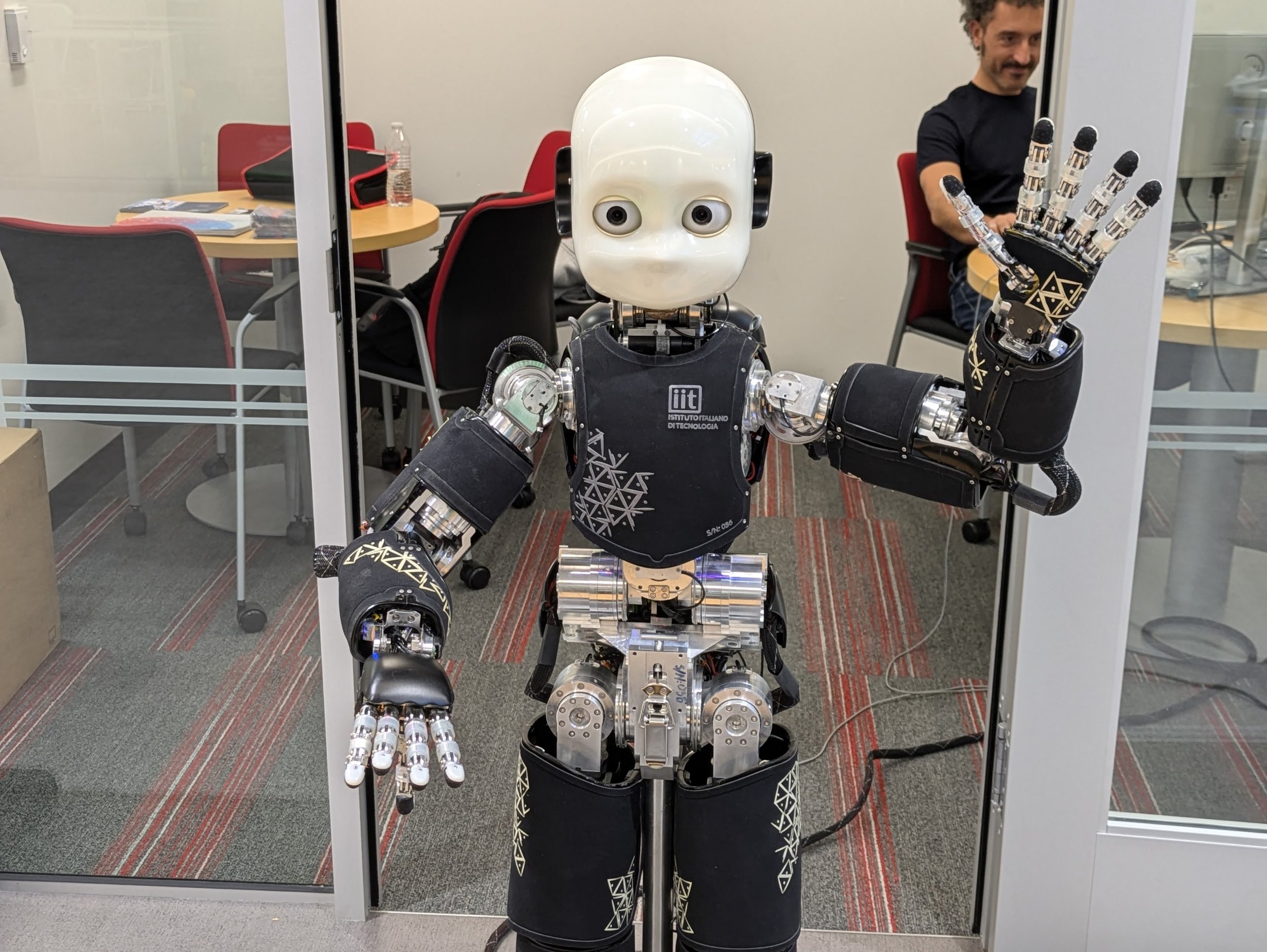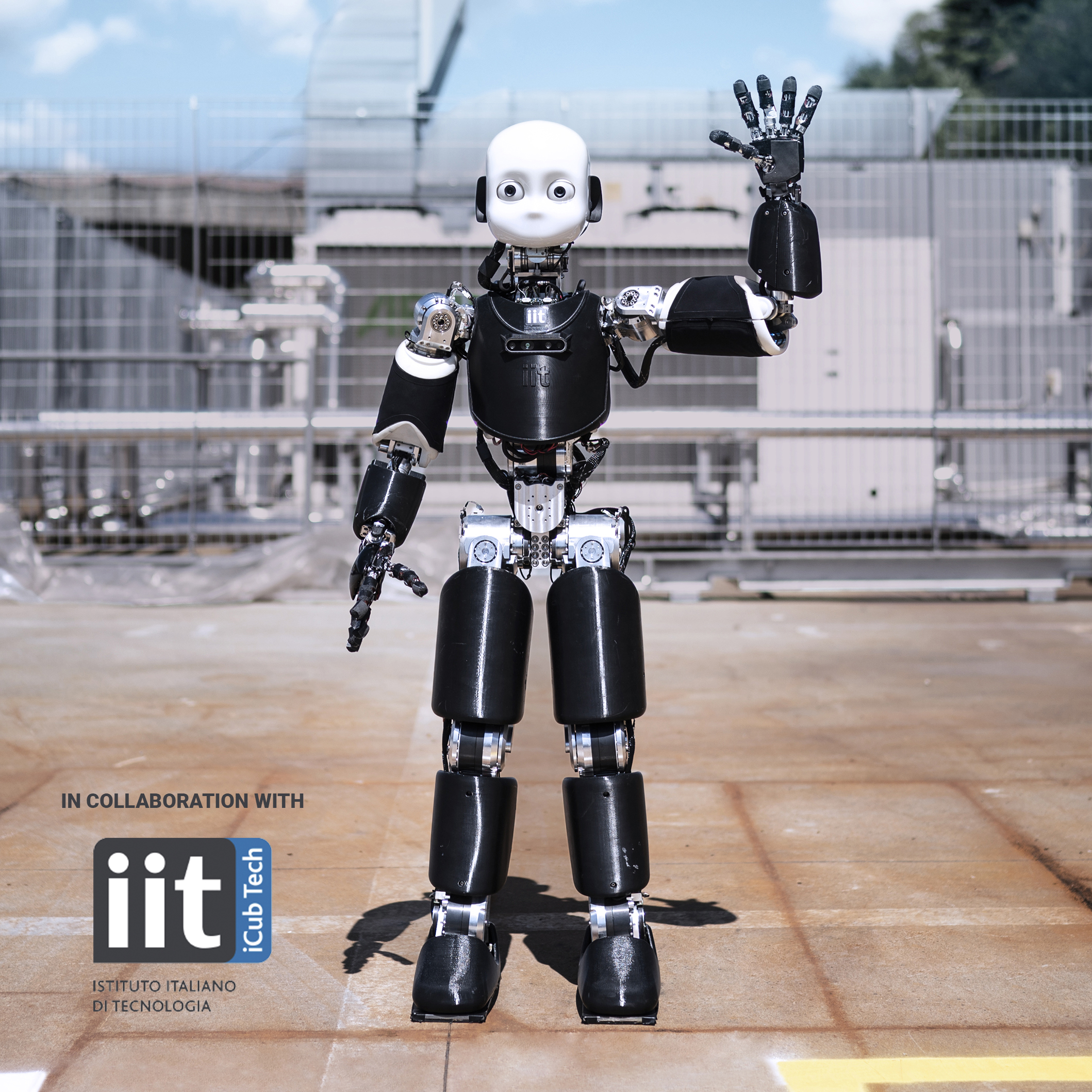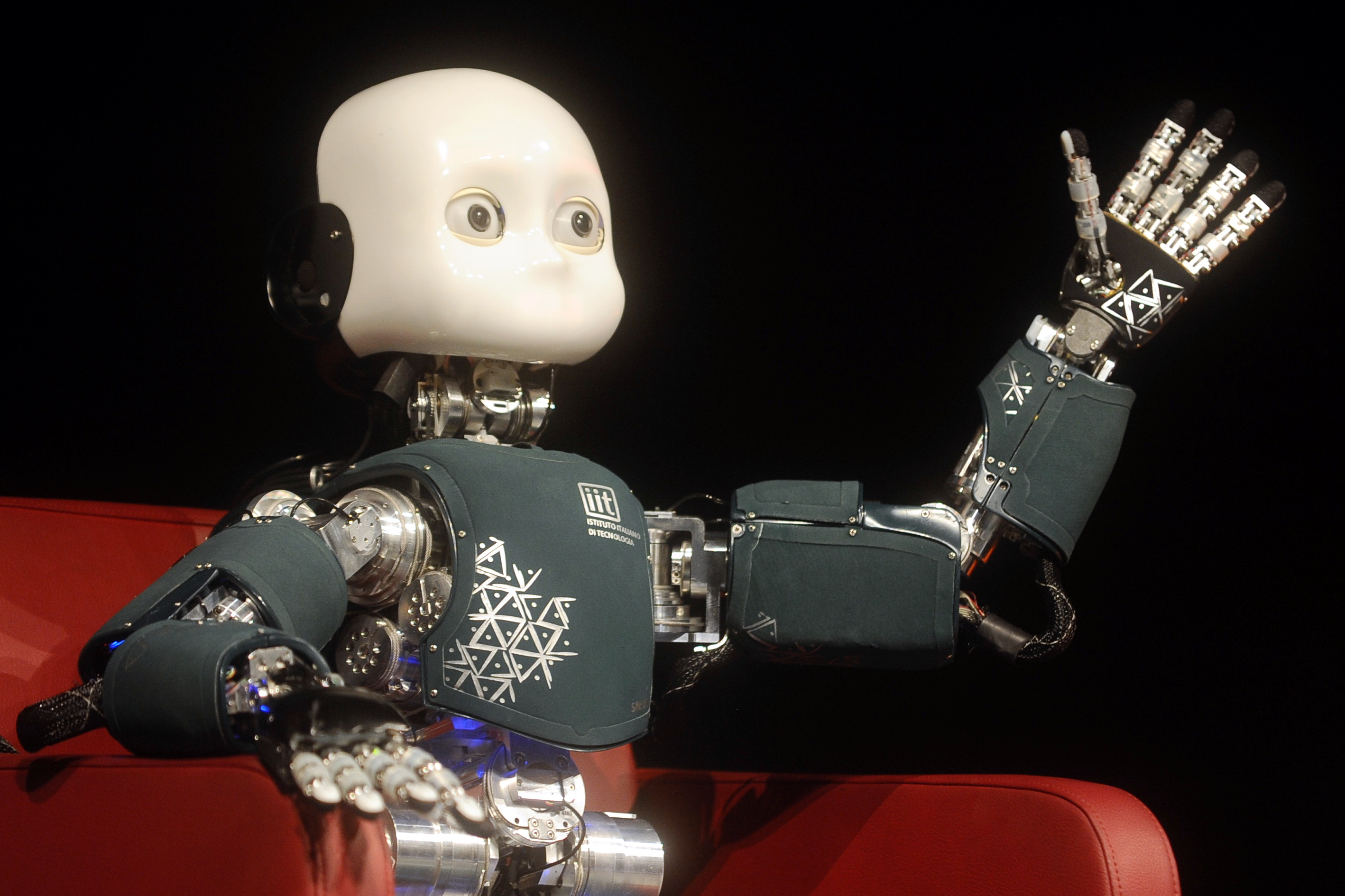
iCub is a child-sized open-source humanoid robot developed by the Italian Institute of Technology (IIT) in Genoa. Originally created by the EU-funded RobotCub Consortium of several European universities — with development starting in 2004 and the first version released around 2008 — iCub was designed as a testbed for research into human cognition, artificial intelligence, and embodied learning. It has become one of the most influential humanoid research platforms in the world, with units in research institutes across the globe, and it continues today as the iCub3.
Price Range
iCub is genuinely available to research institutions, supplied by IIT. It is priced as a research instrument; for reference, IIT has indicated the iCub head alone (a configurable stand-alone robotic setup) at around €40,000, which gives a sense of the scale — a complete iCub is a substantial capital purchase. Quotations are handled directly by IIT.
| Basis | Figure |
|---|---|
| iCub head (stand-alone) | ~€40,000 (~$46,000 at May 2026 rates, indicative) |
| Complete iCub | A major capital purchase; quote-based via IIT |
| Market | Research institutes worldwide |
Full Specifications
| Spec | Value |
|---|---|
| Developer | Italian Institute of Technology (IIT), Genoa; originally the RobotCub Consortium |
| Type | Child-sized open-source humanoid research robot |
| Height | ~1.1 m |
| Weight | ~33 kg |
| Degrees of freedom | ~53 (incl. ~9 DOF per hand; ~6 DOF in the head) |
| Motors | ~53 — 150-W brushless motors for large joints; DC motors for hands and small joints |
| Hands | Five-fingered dexterous hands; nine motors per hand via tendons; tactile sensors in palm and fingertips |
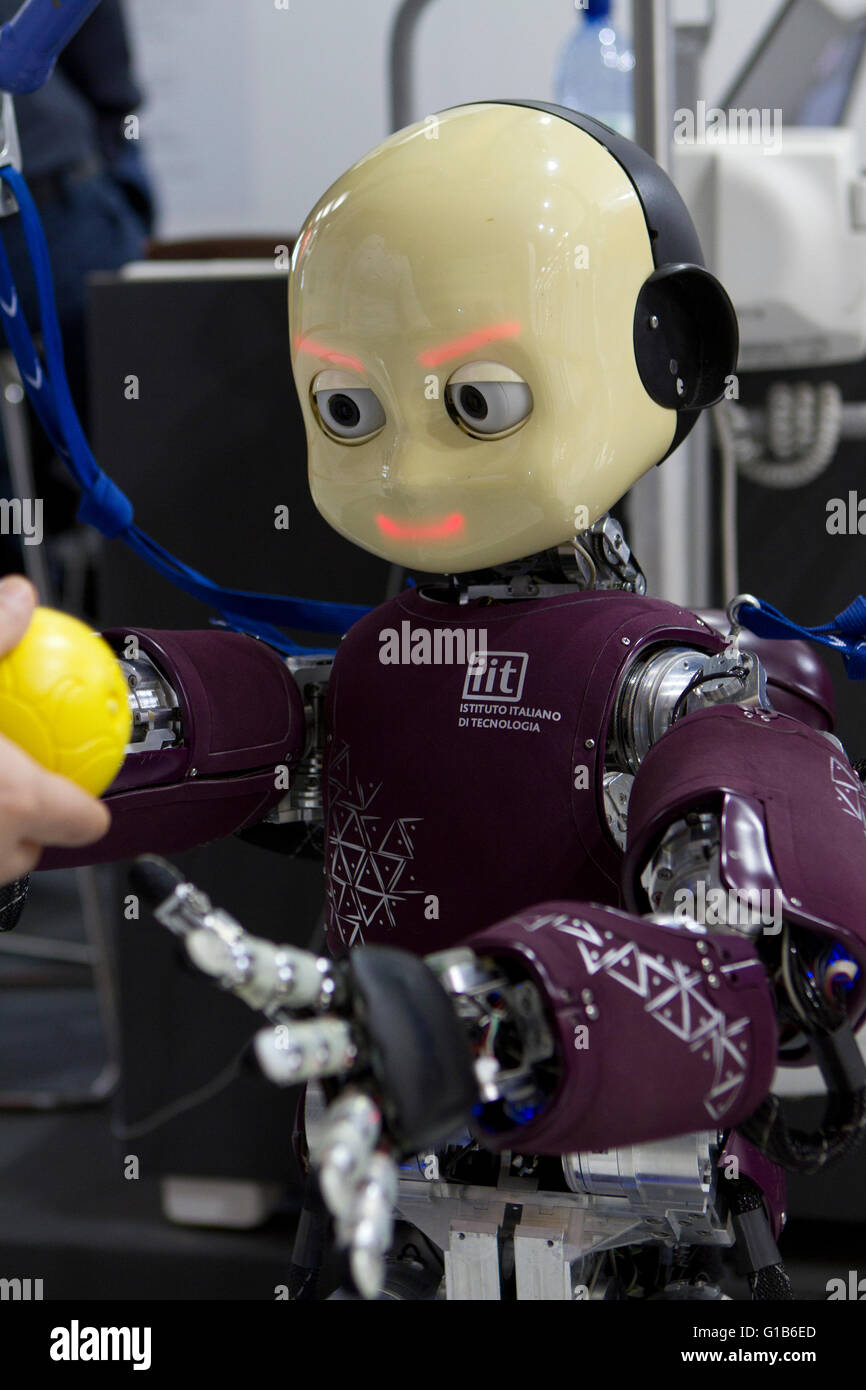
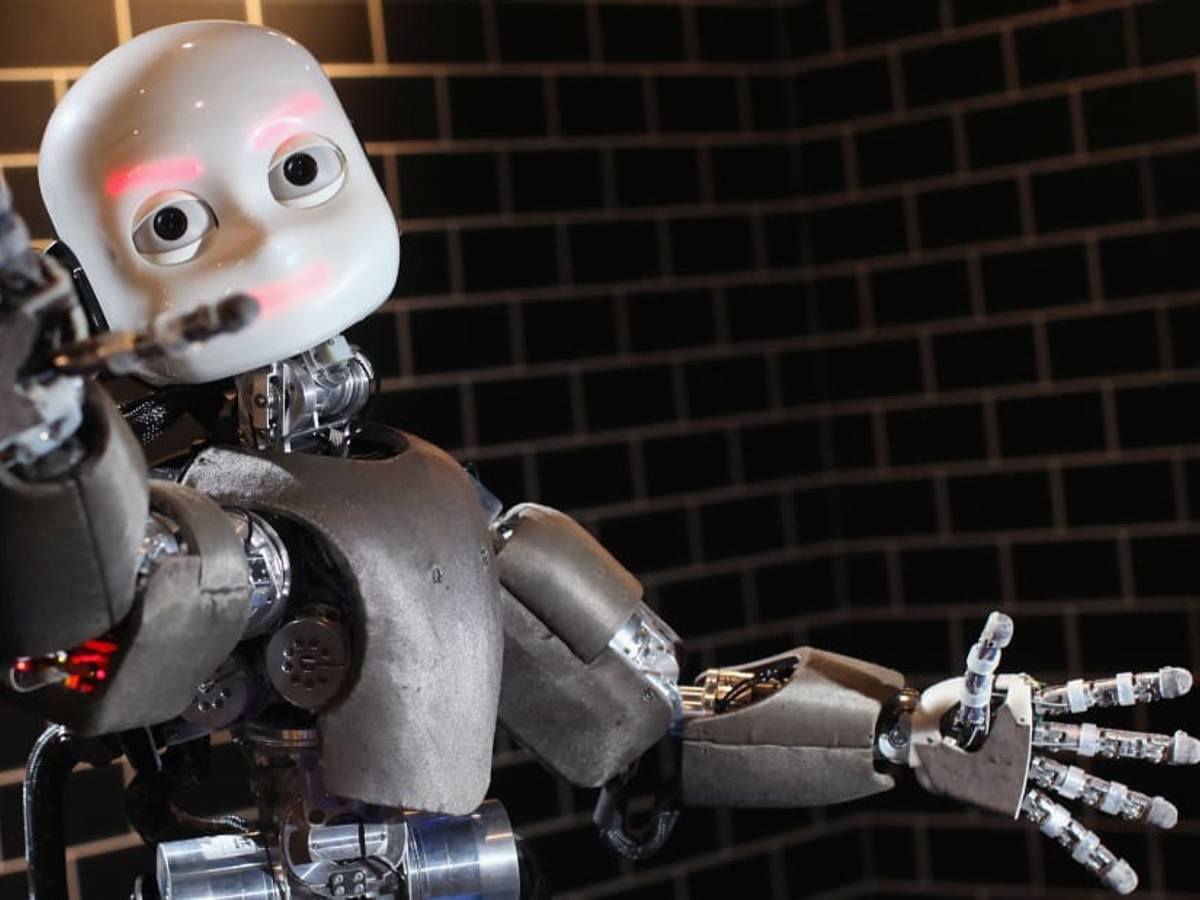
| Sensing | Stereo cameras, gyroscopes, accelerometers, microphones, encoders, force-torque sensors, capacitive tactile "skin" on fingertips and upper body |
| Legs | Compliant legs (derived from the Coman design) on the iCub 2.5, enabling walking |
| Software | Open-source; runs the YARP middleware |
| Capabilities | Crawling, grasping, object recognition, interaction; iCub3 used as a teleoperation/avatar system |
Model Breakdown
iCub has evolved through many versions — IIT upgrades existing units with improved head mechanics, electronics, sensorized skin, and compliant legs rather than building obsolete 1.x versions. The current generation includes the iCub 2.5 (compliant legs, battery backpack) and iCub3 (used in IIT's immersive avatar/teleoperation system). The iCub head is also available as a configurable stand-alone research setup.
Buyer's Guide: What to Know
iCub is a cognition-and-AI research platform. It was built specifically to study human cognition, embodied learning, and AI — its child-sized form and rich sensing reflect that purpose.
Open source is central. The open design and YARP middleware make iCub deeply customizable — a major reason for its wide academic adoption.
The sensorized skin and dexterous hands are standout features. Capacitive tactile skin and tendon-driven five-fingered hands make iCub exceptional for manipulation and human-robot-interaction research.
Engage IIT directly. iCub is supplied to research institutions via IIT; expect a capital-purchase process and the option to configure (or buy just the head).
iCub vs Similar Robots
- iCub vs PAL REEM-C: Both are European research humanoids; iCub is child-sized and cognition-focused, REEM-C is full-size and locomotion/HRI-focused.
- iCub vs SoftBank/Aldebaran NAO: Both are small humanoid research/education robots; iCub is larger, far more sensor-rich, and aimed at deeper cognition research.
- iCub vs DLR Justin: Both emphasize dexterous manipulation research; iCub is an open-source, widely distributed platform, Justin a DLR-internal showcase.