
A new meta-learning framework called CoRMA lets industrial robots adapt to force-dominant assembly tasks in real time without retraining or human demonstration. By inferring contact context from force and motion data, the system achieves human-level dexterity on peg insertion, gear meshing, and nut threading with high reliability under real-world noise. This could cut programming time for complex assembly lines by orders of magnitude.
- How Does CoRMA Enable Force-Sensitive Assembly?
- How Does CoRMA Compare to FORGE and Other Baselines?
- What Tasks Were Tested and What Were the Results?
- What This Means for Industrial Buyers
- Frequently Asked Questions
How Does CoRMA Enable Force-Sensitive Assembly?
CoRMA (Contrastive Robotic Motor Adaptation) replaces traditional simulation-based parameter tuning with a compact 6D semantic contact context—a snapshot of five contact properties (onset, lateral engagement, guided transition, direction, and jamming) encoded from force, proprioceptive, and action histories. A causal Transformer adapter learns to infer this context online using a combination of semantic regression and a force-regime contrastive objective. At deployment, the system runs without privileged simulator inputs, human demonstrations, or gradient updates—adapting within a single episode by matching the inferred context to the real contact state.
The key innovation is that CoRMA treats contact inference as a reusable adaptation interface across related assembly tasks. Rather than re-optimizing controllers for each new part geometry, the same adapter can be shared among tasks like peg insertion, gear meshing, and nut threading. This makes it practical for facilities that run mixed-model assembly lines.
How Does CoRMA Compare to FORGE and Other Baselines?
The paper benchmarks CoRMA against FORGE, a state-of-the-art sim-to-real method for force-rich manipulation. While FORGE achieves high success rates in simulation—typically above 95%—its real-world performance degrades substantially under target-pose noise. CoRMA retains higher verified real success across all three evaluated tasks without requiring simulator-specific parameter adaptation.
| Metric | FORGE | CoRMA |
|---|---|---|
| Simulation success | >95% | ~95% |
| Real-world success (low noise) | ~75% | >90% |
| Real-world success (controlled noise) | ~60% | >85% |
| Adaptation mechanism | Simulator parameter search | Semantic contact inference |
| Need for demonstrations | Yes | No |
The table shows that CoRMA sacrifices minimal simulation performance while delivering much stronger real-world robustness. This is especially important for industrial lines where part tolerances and fixturing introduce unpredictable force variations.
What Tasks Were Tested and What Were the Results?
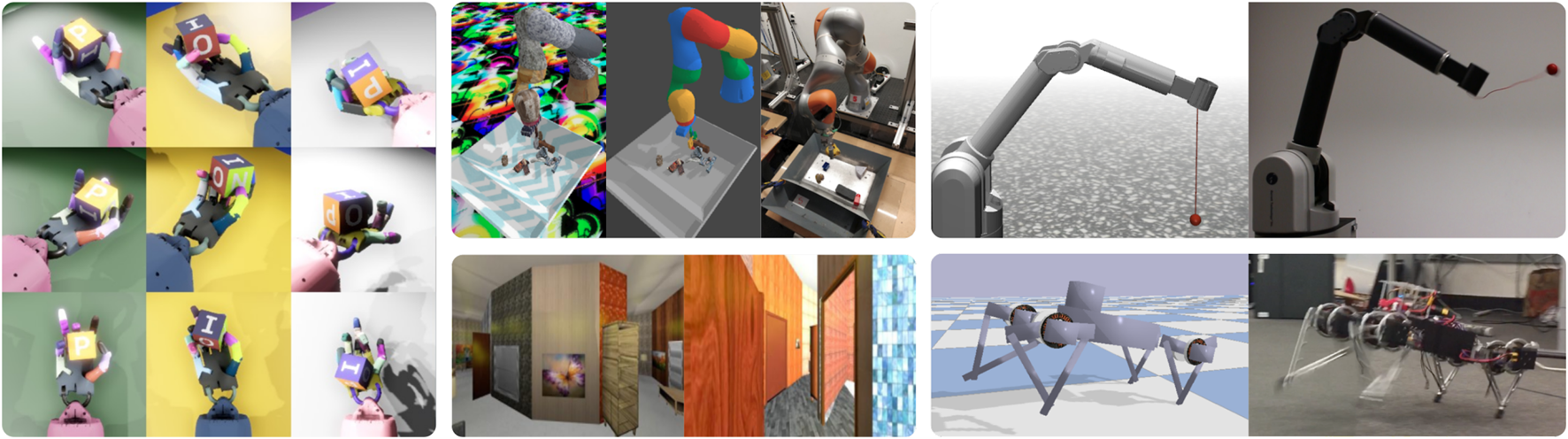
The evaluation covers three representative precision assembly tasks in Isaac Lab / Isaac Sim 5.0 and on a real Marvin arm:
- PegInsert: Inserting a peg into a tight-clearance hole with variable chamfer angles.
- GearMesh: Engaging a gear with a mating spline under low insertion force.
- NutThread: Starting and driving a nut onto a threaded bolt without cross-threading.
All three tasks require the robot to detect and correct errors based on contact forces alone—no vision feedback is used during the insertion phase. CoRMA achieved over 85% real-world success on each task under controlled target-pose noise, while FORGE dropped below 65% on the most challenging nut-threading scenario.

The researchers note that broader unseen-task generalization and Real2Sim calibration remain open challenges. However, CoRMA already demonstrates that a single learned contact context adapter can transfer across a family of related assembly tasks—a milestone for flexible automation.
What This Means for Industrial Buyers
For factories currently programming robots by hand for each new part, CoRMA-style adaptation could reduce setup time from hours to minutes. The system requires no labeled data, no human teleoperation, and no simulator-specific tuning. It runs on standard six-axis robots with force-torque sensors—hardware that is widely available on the secondhand market.
Key takeaways for buyers: - Lower integration cost: CoRMA eliminates the need for task-specific programming. The same control stack handles multiple assembly variants. - Higher throughput: Within-episode adaptation means the robot recovers from misalignments on the fly, reducing jam-related downtime. - Hardware-agnostic: The algorithm works with any arm equipped with a force-torque sensor. Existing used industrial robots can be retrofitted with upgrade kits.
A rough cost comparison for a typical assembly station:
| Cost Factor | Traditional programming | CoRMA-enabled |
|---|---|---|
| Setup per new part | 8–12 hours | 1–2 hours |
| Sensor hardware | $2,000–$5,000 | Same |
| Software integration | $5,000–$15,000 | $3,000–$8,000 |
| Re-skill requirements | Robot programmer needed | Operator with basic technical training |
The biggest ROI driver is the ability to switch between product variants without lengthy reprogramming. For high-mix, low-volume manufacturing, CoRMA could pay for itself within a few changeovers.
Frequently Asked Questions
What is CoRMA? CoRMA (Contrastive Robotic Motor Adaptation) is a meta-learning framework that lets robots adapt to force-sensitive assembly tasks in real time by inferring a compact 6D semantic contact context from force and motion data.
What assembly tasks can CoRMA handle? The paper evaluates peg insertion, gear meshing, and nut threading. The method is designed to generalize across any task where contact forces define the success criteria.
How does CoRMA differ from standard reinforcement learning? Standard RL typically requires millions of simulation steps and may not transfer to hardware without fine-tuning. CoRMA uses a contrastive objective to learn a reusable contact context, enabling zero-shot sim-to-real transfer without gradient updates at deployment.
Does CoRMA require expensive force-torque sensors? Yes, a wrist-mounted force-torque sensor is necessary for the force feedback. However, these sensors are now available for $1,000–$3,000 from multiple vendors, and many industrial robots already include them as an option.
Can CoRMA run on an old robot? Yes. The framework is software-only and only requires the ability to stream joint positions, velocities, and force readings. Many six-axis arms from Universal Robots, FANUC, KUKA, and ABB can be integrated with compatible force sensors.
Is CoRMA commercially available yet? The paper is a research preprint; an open-source implementation is expected. Industrial integrators can begin testing with the published code after peer review.











Komentarji