
一种名为多模态交互场(MIF)的新型感知系统,将人形机器人在动态环境中的重定位成功率从12%提升至94%,同时将内存占用减少了91.4%。该系统在Unitree G1上开发并测试,旨在解决核心挑战:当机器人自身的步态导致摄像头晃动、物体移动,且几何结构必须满足操作安全要求时,如何保持其空间记忆的可靠性。
什么是多模态交互场(MIF)?
MIF 是一个闭环感知-适应管道,专为需要在真实、变化环境中导航和操作的人形机器人设计。它耦合了三个不同的“场”:外观场利用不确定性感知的3D高斯泼溅抑制步态引起的模糊;空间场随时间维持拓扑记忆;几何场在机器人尝试操作前检查交互姿态安全性(IPS)。系统使用差异检测分数区分运动引起的误报和真实环境变化,仅更新局部不一致区域,而非重建整个地图。
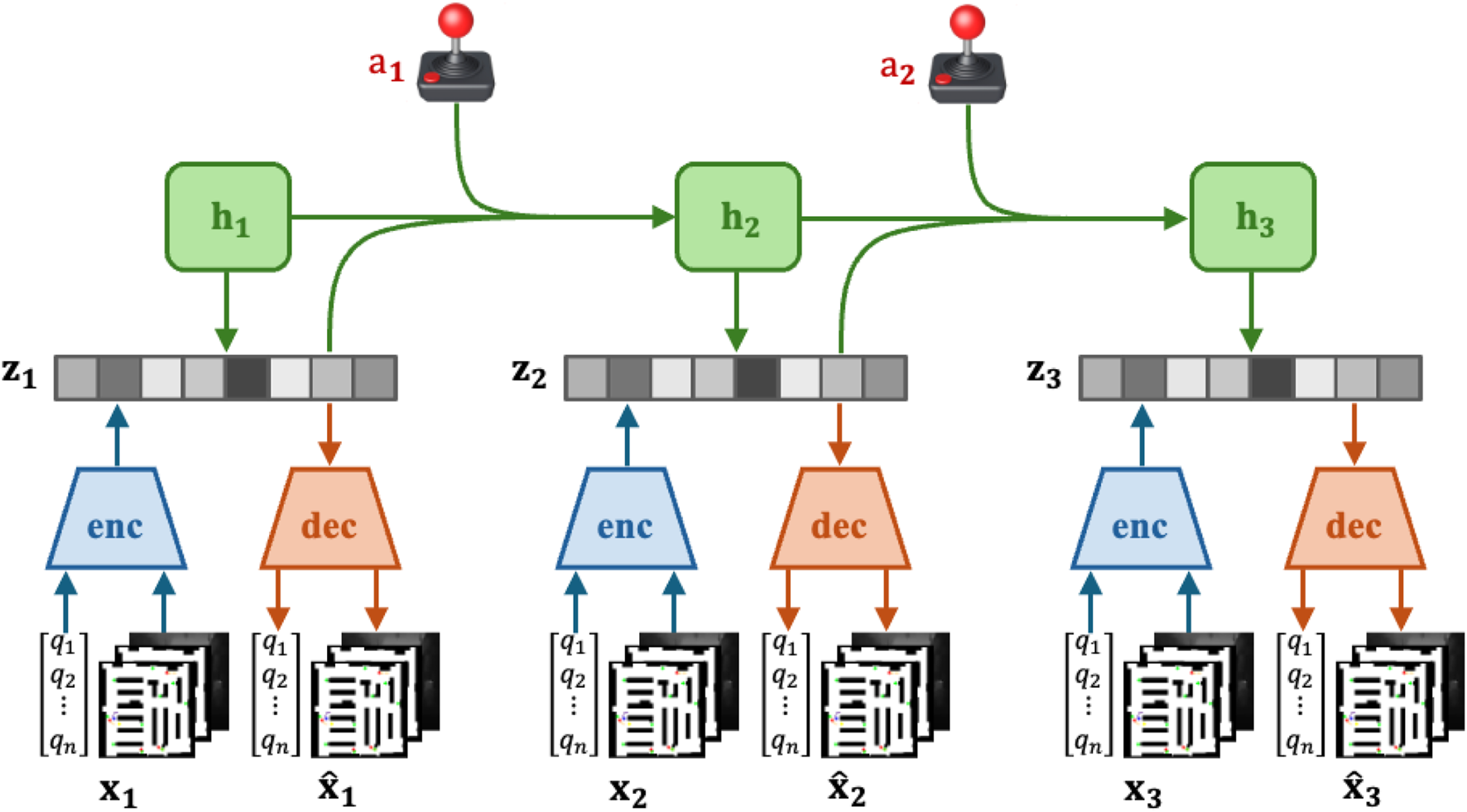
其创新在于将机器人自身的运动视为可测量和补偿的信号,而非需要滤除的噪声。传统语义建图假设稳定的相机轨迹——这对人形机器人而言是一种奢侈。MIF 的置信度感知高斯泼溅可预测模糊发生的位置,并降低这些像素的权重,从而在动态步态中保持场景记忆。
MIF 如何处理步态引起的感知失真?
步行的人形机器人在每次落脚时都会晃动摄像头,产生运动模糊,传统视觉SLAM和语义建图系统难以处理。MIF 的外观场通过跟踪每个3D高斯的置信度来显式建模这一现象——因步态而移动不规则的区域置信度较低,在地图中权重降低。差异检测分数随后将输入帧与存储的外观场进行比较,仅标记超预期步态周期的持续变化。
在Unitree G1实验中,该方法使机器人即使在不平整的办公室地板上行走、跨过电缆和急转弯时,也能保持一致的语义记忆。该系统在非静态环境中实现了94%的重定位成功率,而使用静态场景图记忆仅为12%——7.8倍的提升直接降低了机器人返回已映射位置时的失败率。
为什么重定位成功率对人形机器人部署至关重要?
重定位——在移动后重新识别并返回某个位置或物体的能力——是任何人形机器人实际应用的基础。没有它,机器人无法完成“从工作台取工具,带到工作站,再放回存储区”等多步骤任务。每次失败都需要人工干预,从而降低吞吐量和信任度。
对于商业买家而言,这决定了机器人是能胜任仓库轮班,还是在第一个托盘移动后就迷路。从12%跃升至94%,使这一能力从“实验室玩具”变为“操作基线”。结合MIF的几何场进行任务驱动重建,机器人不仅知道自己的位置,还能评估抓取姿态是否安全——防止与易碎库存或狭窄设备碰撞。
内存占用减少对实际应用意味着什么?
MIF 通过特征蒸馏将语义内存占用减少了91.4%。实际上,之前需要1 GB的地图现在仅需约86 MB。这很重要,因为像Unitree G1这样的人形平台通常搭载有限的计算资源(如Intel NUC),每个兆字节都可用于规划和控制。
| 指标 | 静态场景图 | MIF(我们的) | 提升幅度 |
|---|---|---|---|
| 动态环境重定位成功率 | 12% | 94% | +82 个百分点 |
| 语义内存占用 | ~100%(基线) | 基线的8.6% | 减少91.4% |
| 更新机制 | 完整重映射 | 局部增量 | 可实时 |
| 操作安全检查 | 无 | 交互姿态安全 | 集成 |
小巧的内存占用还开启了机队级地图共享的可能性。机器人可以仅传输场景中变化的部分,减少带宽,支持多个人形机器人在同一空间协同建图。
这对人形机器人买家意味着什么
如果您正在评估用于动态环境(仓库、装配线、实验室、医疗设施)的人形机器人,MIF 解决了最大的操作风险:迷路。研究中使用的Unitree G1已是市场上价格较为亲民的人形机器人之一,一个在真实杂乱环境中可靠工作的导航系统直接提升了投资回报率。
采购关键要点:
- 要求经过验证的鲁棒性:任何声称具备自主能力的厂商,至少应在有移动人和家具的场景中展示出超过90%的重定位成功率。低于50%则尚未成熟。
- 内存效率至关重要:需要高端GPU或云连接进行建图的系统无法规模化。MIF 的低占用(低于100 MB)可在G1的机载计算机上运行——买家应要求类似规格。
- 安全是导航的一部分:MIF 的交互姿态安全检查是一个差异化优势。没有它,人形机器人在杂乱空间中尝试抓取时有撞倒物体或自身的风险。寻找将操作安全集成到导航管道中的系统。
在Botmarket浏览人形机器人 ——包括Unitree G1以及其他可集成类似MIF系统的平台。
常见问题
Unitree G1 在这项研究中扮演什么角色? G1作为动态办公室真实世界实验的测试平台。它是一款29自由度、身高约1.27米的人形机器人,发布时价格低于$16,000,使这类研究变得更加触手可及。
MIF 与标准视觉SLAM有何不同? 标准SLAM假设稳定的相机运动和静态场景。MIF显式建模步态引起的失真,并使用差异分数区分机器人运动与真实环境变化,在非静态环境中实现了7.8倍的重定位提升。
MIF 能否运行在其他人形机器人平台上? 该系统原则上是平台无关的,因为它依赖于摄像头输入和电机关节状态。其他平台(如Figure 02或Tesla Optimus)的采用需要集成,但无需根本性的架构改变。
91.4%的内存减少是如何实现的? 通过特征蒸馏——将高维3D高斯特征压缩为紧凑描述符,同时保留语义信息。仅更新局部变化区域,避免完整地图重建。
交互姿态安全是MIF独有的吗? 大多数导航系统直到到达目的地后才考虑操作安全。MIF将几何检查直接嵌入建图管道,使机器人能够在目标姿态不安全时中止重定位。
该系统何时能商业化? 研究人员发布了项目页面和代码,但尚未公布商业化集成。工业买家应关注未来6-12个月内与人形机器人OEM的许可或合作。
您正在动态环境中运行人形机器人吗?导航可靠性是否值得投资?
结论
MIF 代表了人形机器人在人类实际工作的混乱多变空间中导航和操作的重要一步。通过统一处理步态引起的模糊、内存膨胀和操作安全,它将12%的重定位成功率提升至94%——这一飞跃将实验室演示与商业部署区分开来。对于买家而言,关键指标不再仅是硬件规格,而是机器人的感知系统在真实世界中的生存能力。











参与讨论
Which humanoid OEM will integrate MIF-style navigation first?