What is the Dlr Justin?
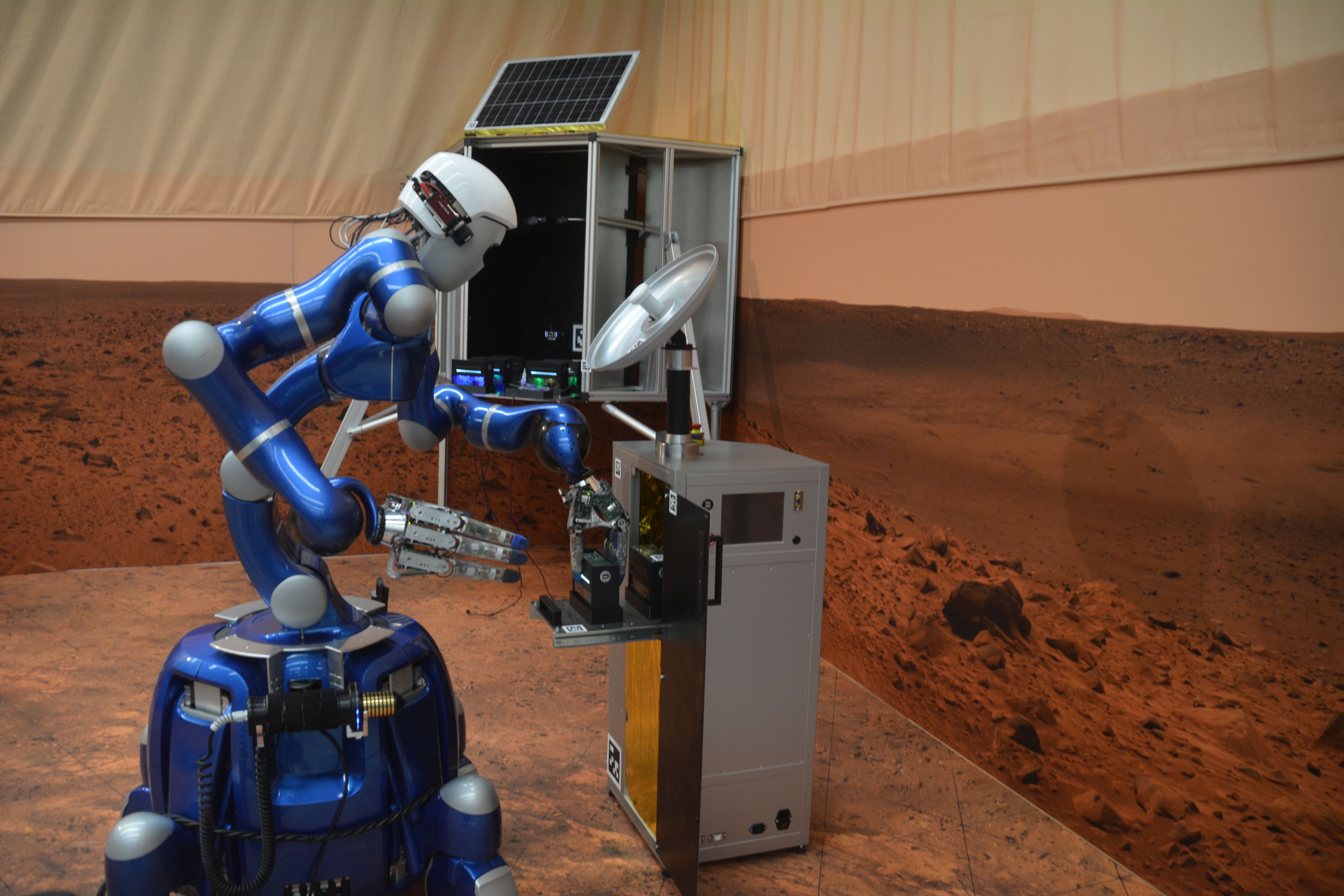
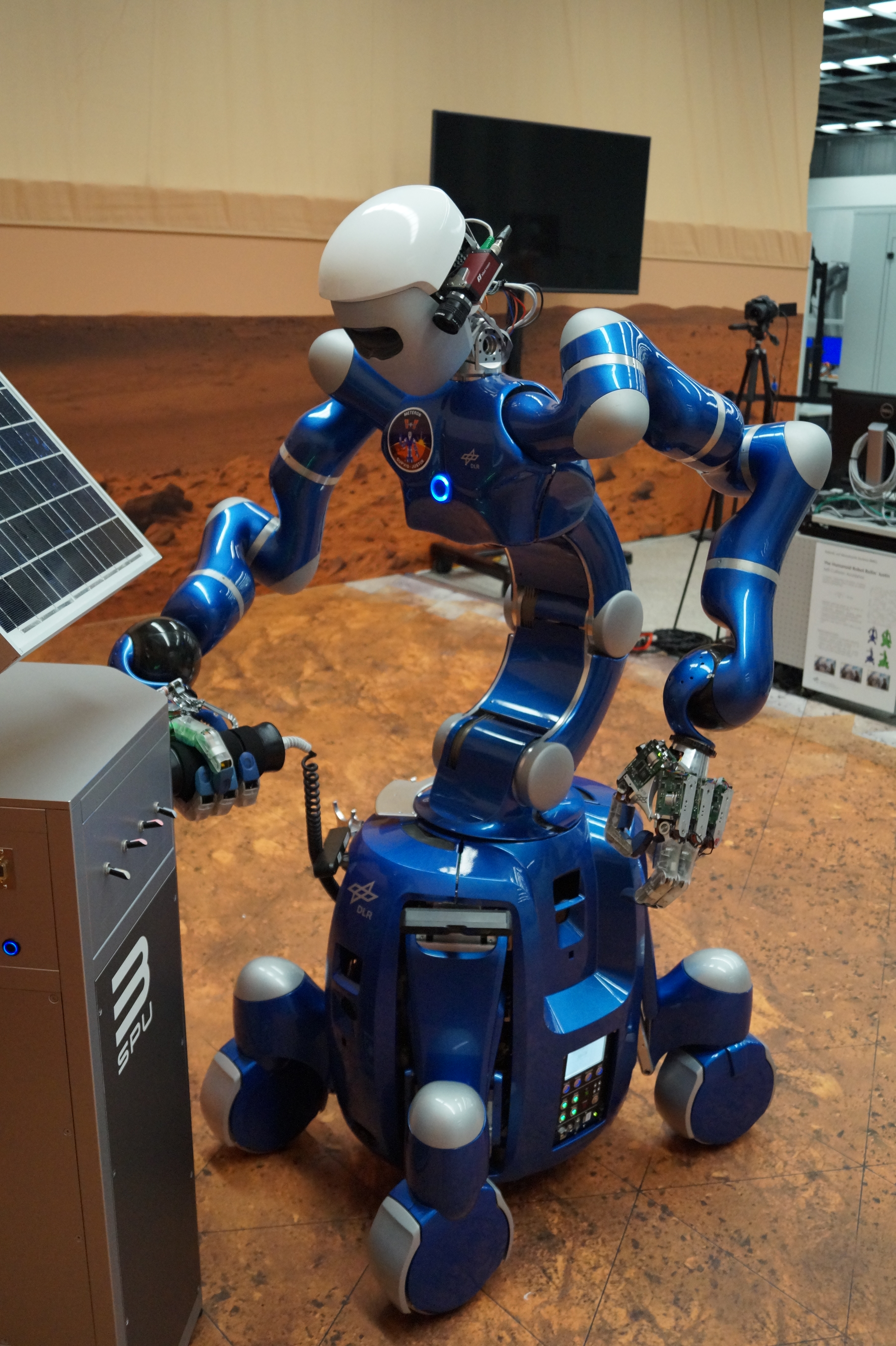
The DLR Justin is a humanoid upper-body robot developed by the Institute of Robotics and Mechatronics at the German Aerospace Center (DLR) in Oberpfaffenhofen, Germany. It serves primarily as a research platform for dexterous manipulation, human-robot interaction, and advanced telerobotics. Featuring two lightweight, torque-controlled arms and DLR-Hand-II four-fingered hands mounted on a 3-DOF movable torso atop an omnidirectional mobile base, Justin integrates high-fidelity force sensing in every joint. It has demonstrated landmark capabilities such as catching thrown objects, bi-manual assembly, and remote teleoperation with haptic feedback, but remains a laboratory-only system powered and computed externally.
Specifications
Here are the full technical specifications.
| Spec | Value |
|---|---|
| Height | 190 cm |
| Weight | 150 kg |
| Degrees of freedom | 41 |
| Battery life | Not applicable (tethered) |
| Max speed | 3.6 km/h |
| Payload | ~15 kg (arm, est.) |
| Price (new) | Not for sale |
| Price (used range) | N/A |
Price & Value
New MSRP: Not for sale (research platform)
Used range: N/A
DLR Justin was never commercialized and has no retail price. As a bespoke research instrument, its value is measured in scientific output rather than capital cost. The closest commercial comparison, Willow Garage’s PR2, originally sold for $400,000, but Justin surpasses it in dexterity and force-sensing fidelity. Should a similar platform ever enter the market, a price north of $500,000 would not be surprising given the premium torque-controlled joint modules and custom hand hardware. For labs, accessing comparable technology currently requires either building a custom integration or collaborating directly with DLR.
Who Is It For?
Best for: - University robotics labs researching dexterous manipulation and whole-body control (41 DOF with full torque sensing) - Space agencies evaluating remote teleoperation for on-orbit servicing (Justin’s telerobotic demos set benchmarks) - Industrial R&D teams needing a benchmark platform for force-controlled assembly and human-robot collaboration
Not for: - Heavy industrial tasks (arm payload is only ~15 kg per arm, and the robot is tethered) - Mobile applications requiring stair climbing or outdoor operation (wheeled base, no legs) - Buyers looking for a plug-and-play commercial product (no sales channel, no warranty, requires expert system integration)
Alternatives & Comparison
In the rarified world of high-end humanoid research platforms, DLR Justin competes with a handful of comparably advanced manipulators, none of which are available off-the-shelf.
| Model | Price | Available | Key Difference |
|---|---|---|---|
| Willow Garage PR2 | $400,000 (original MSRP) | yes | Mobile manipulator with open-source software, no humanoid torso; only two 7-DOF arms on a mobile base. |
| Kawada HRP-4 | Undisclosed | no | Full walking humanoid with 34 DOF; lighter and smaller hands, less sophisticated torque sensing. |
Verdict: For research groups focused solely on bimanual manipulation and force control, DLR Justin remains the gold standard thanks to its integrated torque sensors and high-speed real-time communication. However, if mobile logistics or open-source codebase are priorities, a PR2 may be a more accessible albeit less capable alternative. The HRP-4 offers walking but significantly less hand dexterity, making it better suited for locomotion research than manipulation.
Use Cases & Capabilities
Dexterous manipulation research
Justin’s unique combination of 41 torque-controlled joints and four-fingered hands with tactile sensors allows researchers to push the boundaries of fine motor skills. It has been used to study robust grasping under uncertainty, in-hand manipulation, and even catching thrown objects in real time. The wrist force/torque sensors enable high-fidelity impedance control, making it an ideal testbed for algorithms that require precise force regulation. Because the entire system is tethered, experiments can run indefinitely without battery constraints, allowing long-duration learning sessions.
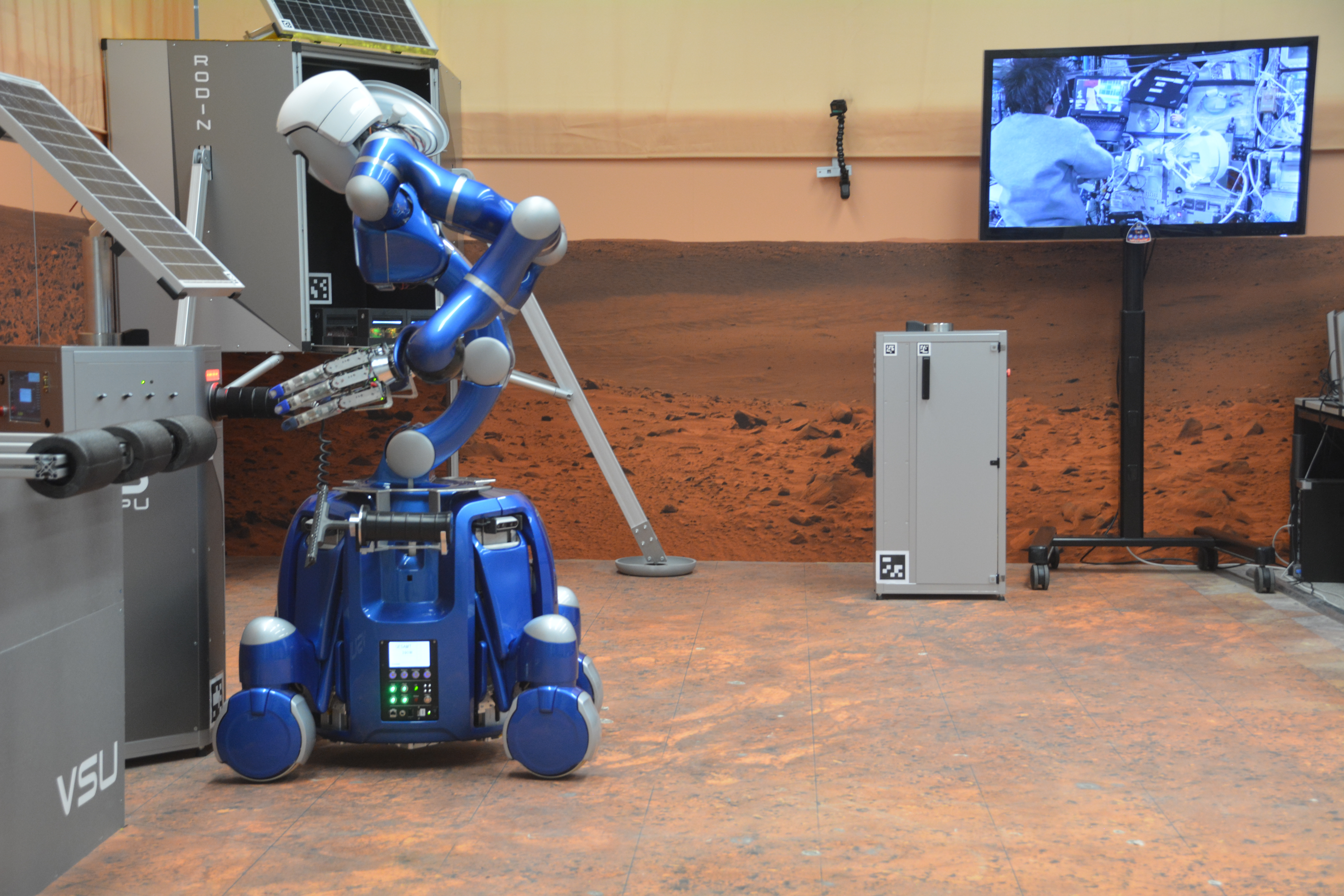
Telerobotics and teleoperation
Justin has been a flagship demonstrator for DLR’s space robotics ambitions, particularly for on-orbit servicing tasks performed from ground control. A human operator wearing an exoskeleton can control the robot’s arms and hands with haptic feedback, while head-mounted displays give stereo vision. This setup has been used to evaluate latency compensation, shared autonomy, and supervisory control schemes. The robot’s omnidirectional base and telescopic spine allow it to reach various workspaces, simulating satellite repair or assembly scenarios.
Industrial assembly and human-robot interaction
Although not deployed in factories, Justin serves as a research platform for advanced assembly concepts, including tight-tolerance peg-in-hole insertions and flexible object handling. Force-controlled joint modules allow the robot to comply naturally when interacting with humans, paving the way for safe, collaborative work cells. The dual-arm coordination algorithms developed on Justin have influenced later DLR lightweight robot arms now used in industry. However, the lack of mobility beyond a flat floor limits its direct transfer to dynamic factory floor settings.
History & Background
The DLR Justin was first assembled in 2008 by the German Aerospace Center’s Robotics and Mechatronics Institute, building on decades of lightweight robot arm research. The initial Justin featured a rigid torso and wheeled base; by 2011, the upgraded Agile Justin version incorporated a compliant, spring-loaded spine and improved hand modules, enhancing dynamic performance. Continuous incremental upgrades have kept the robot at the forefront of force-controlled manipulation, spawning spin-off technologies used in DLR’s space robot programs and industrial lightweight arms. Although never commercialized, Justin remains an active research tool and a celebrated landmark in humanoid robotics, with over a decade of demonstrated capabilities in object catching, telemanipulation, and assembly.
Buying Used — What to Check
Verify system integration Justin is not a standalone product; it relies on an external PC cluster and power supply—ensure all components are included and functional.
Assess arm/hand calibration Torque sensors and kinematic chains may drift over time; recalibration requires specialized DLR tools and expertise.
Confirm software access The robot runs a custom Linux real-time stack; without the original software framework, operation is extremely difficult.