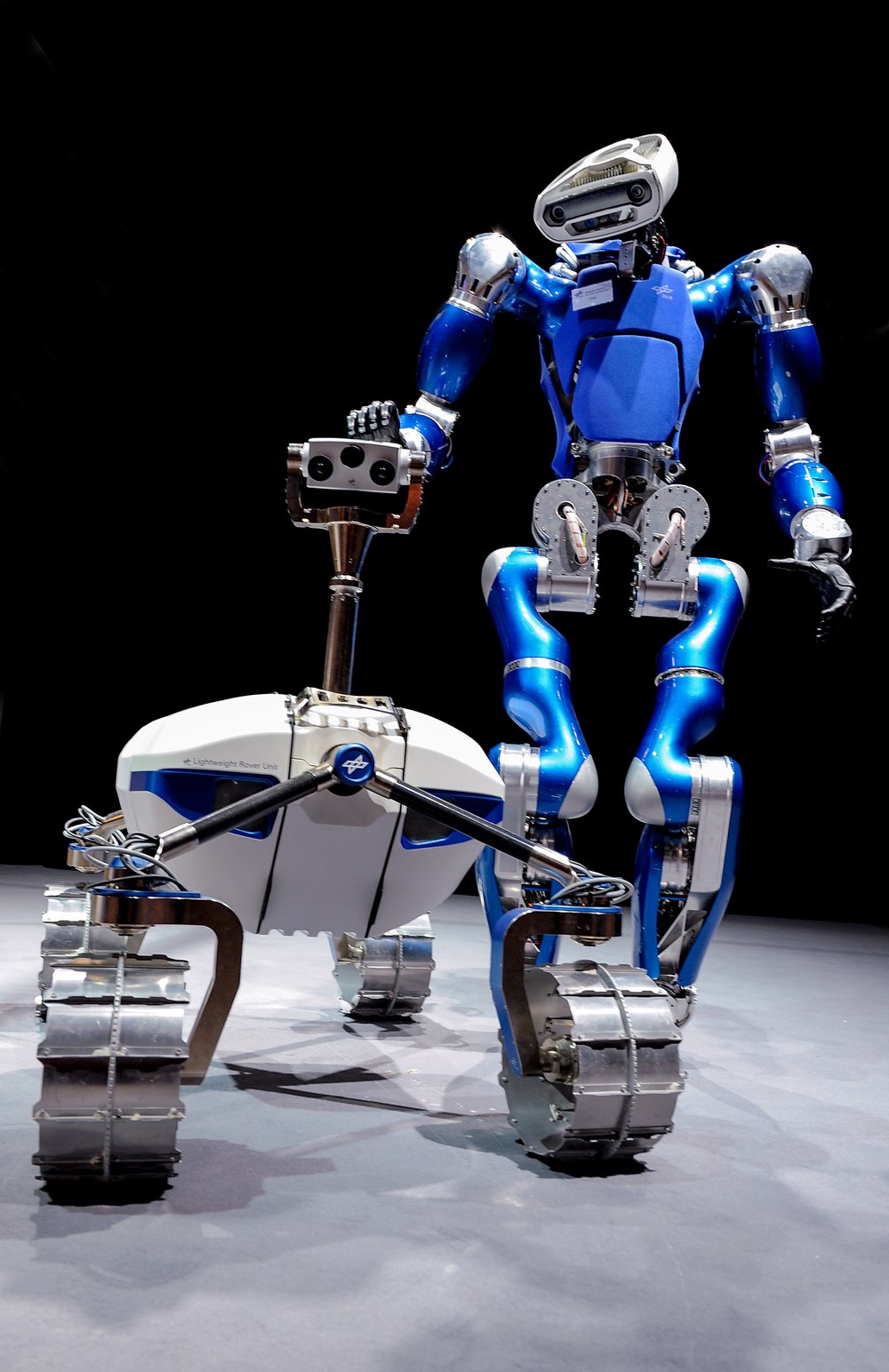
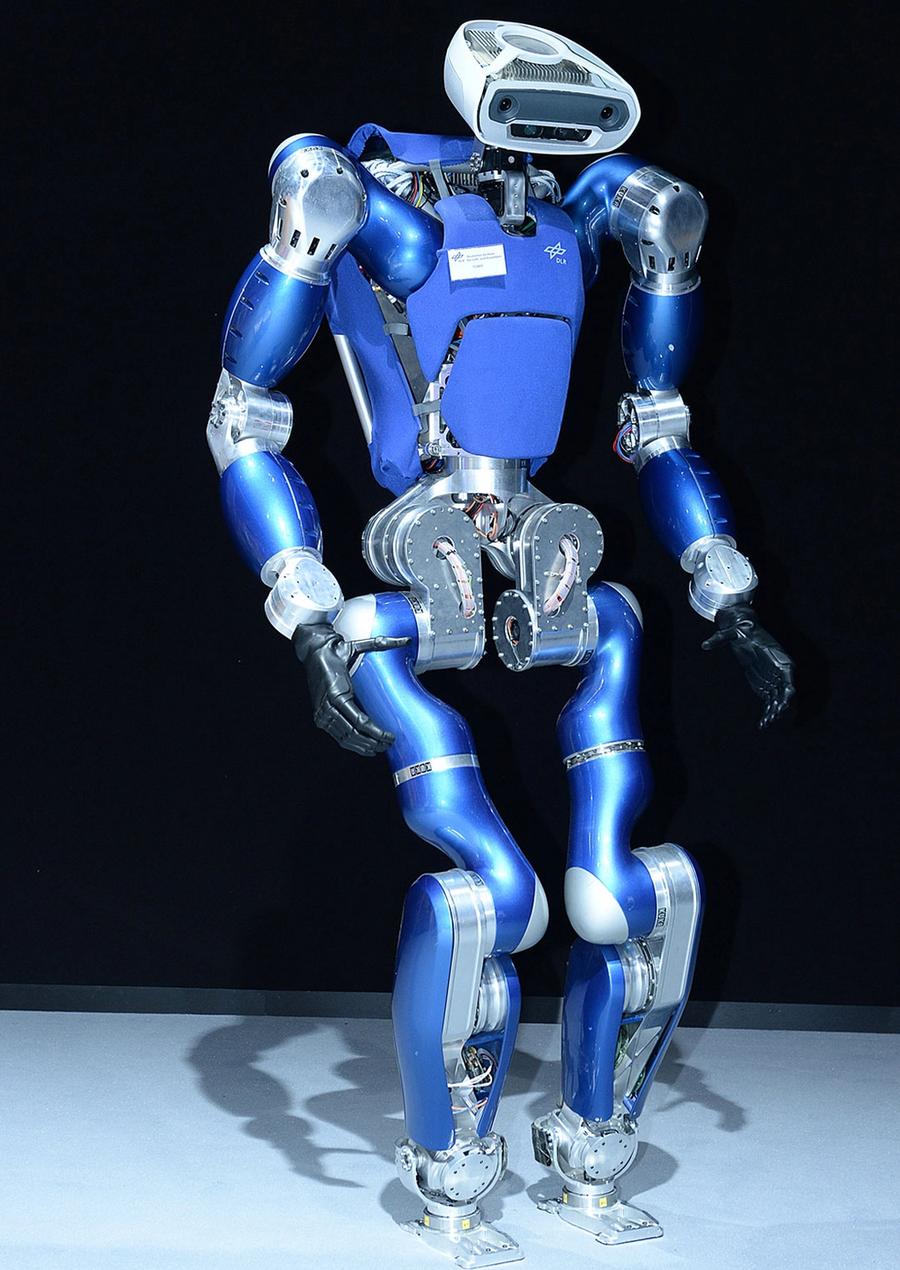
TORO (TOrque-controlled humanoid RObot) is a bipedal humanoid robot developed by the German Aerospace Center (DLR). TORO grew out of DLR's "DLR-Biped" — a pair of robotic legs that first walked in 2009 — which was later given an all-new upper body and renamed TORO. As a torque-controlled biped, TORO is a research platform for studying bipedal walking and the combination of locomotion with manipulation ("loco-manipulation"). Its name also means "bull" in Spanish.
Availability
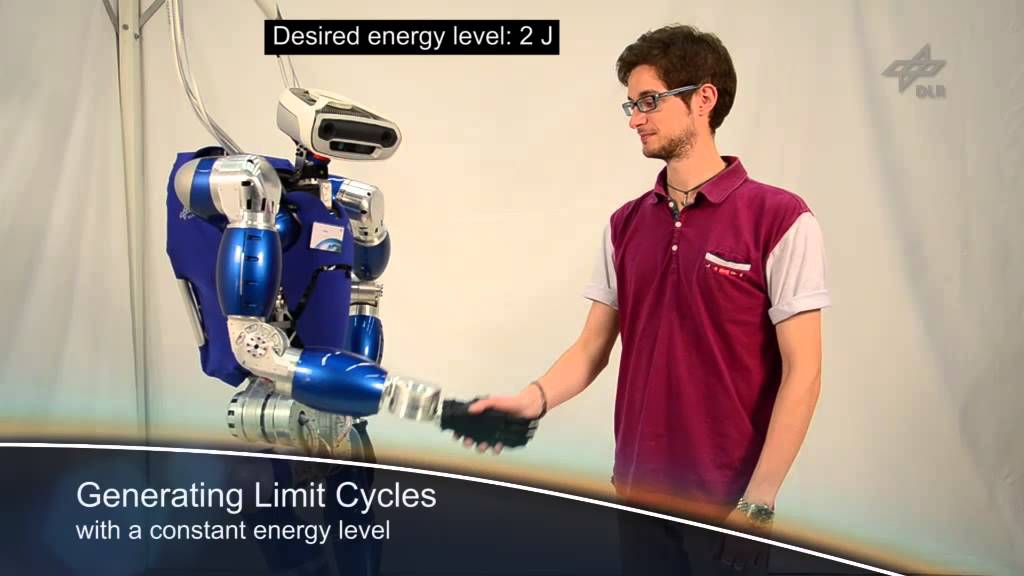
TORO is a research robot, developed and used internally by DLR — not a commercial product. There is no price or purchasing path. DLR uses TORO to study whole-body, torque-controlled bipedal behavior — robots that carry out sequences of movements "with foresight and fluency."
Full Specifications
| Spec | Value |
|---|---|
| Developer | German Aerospace Center (DLR), Robotics and Mechatronics Center |
| Origin | Evolved from the DLR-Biped (legs first walked in 2009); upper body added to create TORO |
| Type | Torque-controlled bipedal humanoid |
| Motors | 25 |
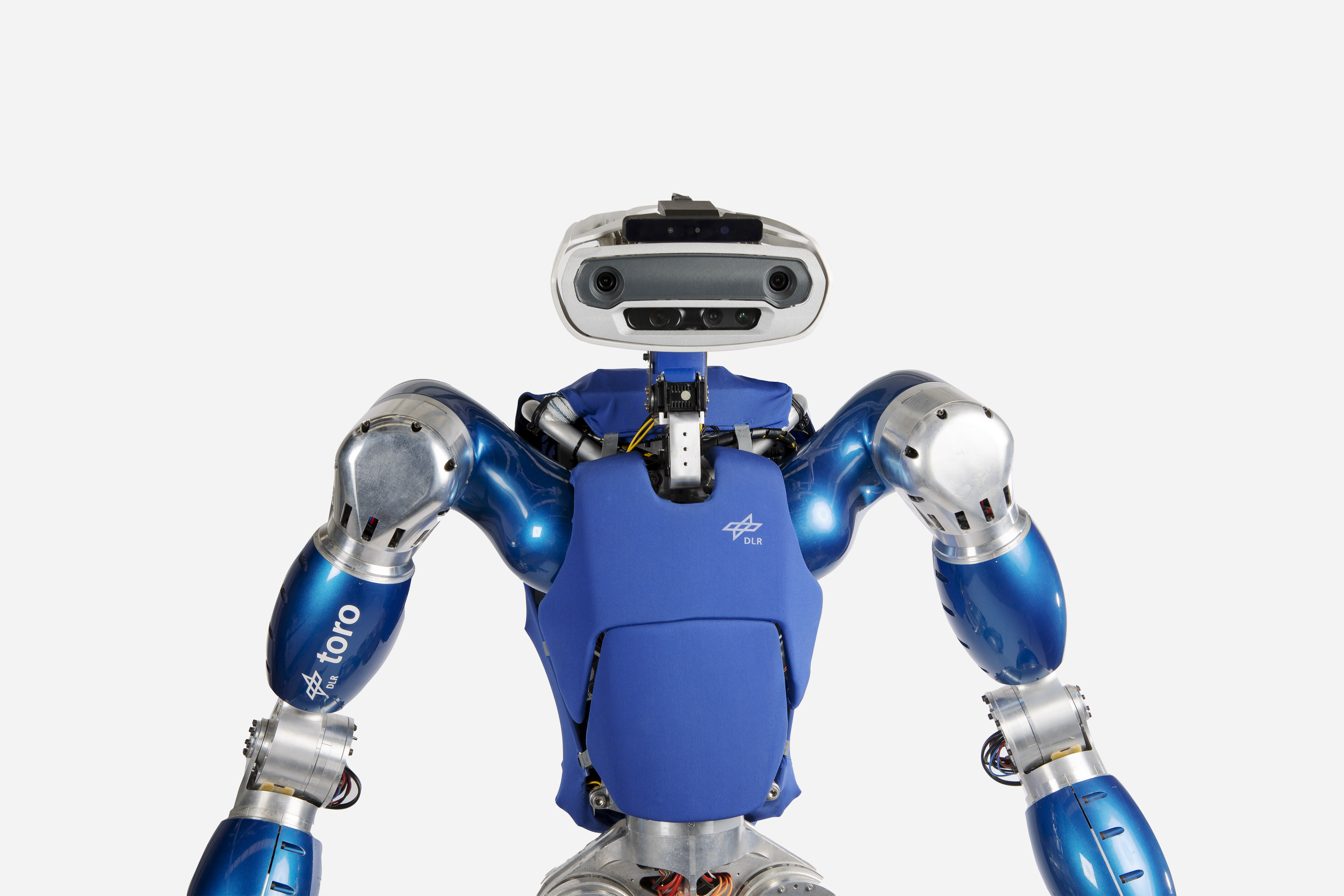
| Actuation | Torque-controlled; supports both position and torque control modes; arm drives based on the KUKA-DLR Lightweight Robot (LWR) |
| Payload | ~10 kg |
| Sensing | Position and torque sensors in each joint; 6-DOF force/torque sensor in each ankle; IMUs on torso and head; depth camera, stereo cameras, and an Intel RealSense in the head |
| Self-sufficiency | Self-contained |
Significance
TORO represents DLR's application of its renowned torque-controlled, force-sensitive robotics expertise to the bipedal-humanoid problem. Torque control throughout the body lets TORO walk and balance compliantly and combine walking with manipulation — a research focus increasingly central to the whole humanoid field. Built on the proven DLR-Biped legs and DLR's lightweight-robot arm technology, TORO is a respected European research platform for whole-body humanoid control.
TORO vs Related Robots
- TORO vs DLR Justin: Same institution — TORO is the bipedal walker; Justin is the wheeled-base dexterous manipulation humanoid.
- TORO vs PAL TALOS: Both are torque-controlled European research humanoids; TALOS is sold to institutions, TORO is DLR-internal.
- TORO vs Agility Cassie: Both are torque/force-aware bipedal locomotion research platforms; TORO is a full humanoid, Cassie is legs-only.
Source: German Aerospace Center (DLR)