
A new perception system called the Multi-modal Interactive Field (MIF) raises humanoid robot relocation success in dynamic environments from 12% to 94% while cutting memory footprint by 91.4%. Developed and tested on a Unitree G1, MIF tackles the core challenge: keeping a robot’s spatial memory reliable when its own gait shakes the cameras, objects move, and geometry must be safe for manipulation.
- What is the Multi-modal Interactive Field (MIF)?
- How does MIF handle gait-induced perceptual distortion?
- Why does relocation success matter for humanoid deployment?
- What does the memory footprint reduction mean for real-world use?
- What This Means for Humanoid Buyers
What is the Multi-modal Interactive Field (MIF)?
MIF is a closed-loop perception-adaptation pipeline built specifically for humanoid robots that must navigate and manipulate in real, changing environments. It couples three distinct “fields”: an Appearance Field using uncertainty-aware 3D Gaussian Splatting to suppress gait-induced blur, a Spatial Field that maintains topological memory over time, and a Geometry Field that checks Interaction Pose Safety (IPS) before the robot attempts a manipulation. The system uses a discrepancy detection score to distinguish locomotion-induced false positives from real environmental changes, updating only locally inconsistent regions rather than rebuilding the entire map.
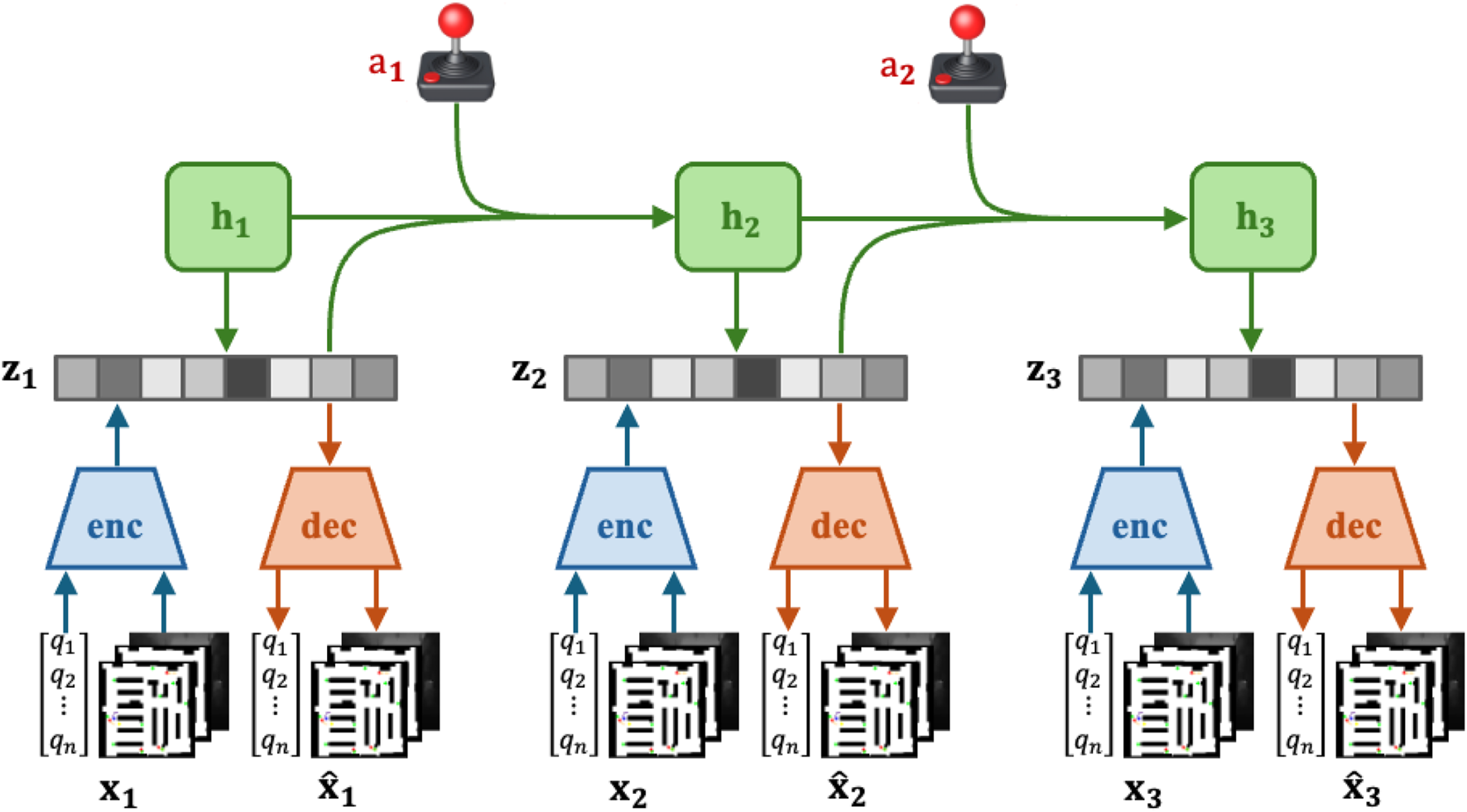
The innovation lies in treating the robot’s own motion not as noise to be filtered out, but as a signal that can be measured and compensated for. Traditional semantic mapping assumes stable camera trajectories — a luxury humanoids rarely have. MIF’s confidence-aware Gaussian Splatting predicts where blur will occur and weights those pixels down, preserving scene memory even during a reactive footstep.
How does MIF handle gait-induced perceptual distortion?
Walking humanoids shake their cameras with every footfall, creating motion blur that conventional visual SLAM and semantic mapping systems struggle with. MIF’s Appearance Field explicitly models this by tracking the uncertainty of each 3D Gaussian — regions that move erratically due to gait have lower confidence and are down-weighted in the map. The discrepancy detection score then compares incoming frames against the stored Appearance Field, flagging only changes that persist beyond the expected gait period.
In the Unitree G1 experiments, this approach allowed the robot to maintain a consistent semantic memory even while walking over uneven office flooring, stepping over cables, and turning sharply. The system achieved a 94% relocation success in non-static environments versus 12% using static scene-graph memory — a 7.8× improvement that directly translates to fewer failures when the robot must return to a previously mapped location.
Why does relocation success matter for humanoid deployment?
Relocation — the ability to re-identify and return to a position or object after moving — is the backbone of any practical humanoid application. Without it, a robot cannot complete multi-step tasks like “fetch the tool from the bench, bring it to the workstation, and return it to storage.” Every failure forces a human intervention, killing throughput and trust.
For commercial buyers, this is the difference between a robot that can handle a warehouse shift and one that gets lost after the first pallet is moved. The leap from 12% to 94% moves this capability from “research curiosity” to “operational baseline.” When combined with MIF’s Geometry Field for task-driven reconstruction, the robot not only knows where it is but can also evaluate whether a grasp pose is safe — preventing collisions with fragile inventory or tight fixtures.
What does the memory footprint reduction mean for real-world use?
MIF reduces semantic memory footprint by 91.4% through feature distillation. In practical terms, a map that previously required 1 GB now fits in roughly 86 MB. This matters because humanoid platforms like the Unitree G1 carry limited onboard compute — typically an Intel NUC or similar — and need every megabyte for planning and control.
| Metric | Static Scene-Graph | MIF (Ours) | Improvement |
|---|---|---|---|
| Relocation success (dynamic env.) | 12% | 94% | +82 pp |
| Semantic memory footprint | ~100% (baseline) | 8.6% of baseline | 91.4% reduction |
| Update mechanism | Full remap required | Local incremental | Real-time capable |
| Manipulation safety check | None | Interaction Pose Safety | Integrated |
The small memory footprint also opens the door to fleet-level map sharing. Robots can transmit only the changed portions of a scene, reducing bandwidth and enabling collaborative mapping across multiple humanoids working the same space.
What This Means for Humanoid Buyers
If you are evaluating humanoid robots for dynamic environments — warehouses, assembly lines, laboratories, healthcare facilities — MIF addresses the single biggest operational risk: getting lost. The Unitree G1 used in the study is already one of the more affordable humanoids on the market, and a navigation system that works reliably in real-world clutter directly improves return on investment.
Key takeaways for procurement:
- Demand demonstrated robustness: Any vendor claiming humanoid autonomy should, at minimum, show relocation success rates above 90% in scenes with moving people and furniture. Sub-50% is not ready.
- Memory efficiency matters: Systems that require high-end GPUs or cloud connectivity for mapping will not scale. MIF’s sub-100 MB footprint runs on the G1’s onboard computer — buyers should ask for comparable specs.
- Safety is part of navigation: MIF’s Interaction Pose Safety check is a differentiator. Without it, a humanoid attempting a grasp in a cluttered space risks toppling objects or itself. Look for systems that integrate manipulation safety into the navigation pipeline.
Browse humanoid robots on Botmarket — including the Unitree G1 and platforms that could integrate systems like MIF.
Frequently Asked Questions
What is the Unitree G1’s role in this research? The G1 served as the test platform for real-world experiments in a dynamic office. It is a 29-DOF humanoid roughly 1.27 m tall, costing under $16,000 at launch, making it the most accessible biped for such research.
How does MIF differ from standard visual SLAM? Standard SLAM assumes stable camera motion and static scenes. MIF explicitly models gait-induced distortion and uses a discrepancy score to distinguish robot motion from real environmental changes, achieving 7.8× better relocation in non-static settings.
Can MIF run on other humanoid platforms? The system is platform-agnostic in principle, since it relies on camera input and motor joint states. Adoption by other platforms like the Figure 02 or Tesla Optimus would require integration but no fundamental re-architecture.
How is the 91.4% memory reduction achieved? Through feature distillation — compressing high-dimensional 3D Gaussian features into compact descriptors while retaining semantic information. Only locally changed regions are updated, avoiding full-map rebuilds.
Is Interaction Pose Safety unique to MIF? Most navigation systems ignore manipulation safety until after reaching a destination. MIF embeds geometry checks directly into the mapping pipeline, allowing the robot to abort a relocation if the target pose is unsafe for grasping.
When will this system be commercially available? The researchers released a project page and code, but no commercial integration has been announced. Industrial buyers should watch for licensing or partnerships with humanoid OEMs in the next 6–12 months.
Are you running humanoids in dynamic environments — does navigation reliability justify the investment?
Conclusion
MIF represents a significant step toward humanoid robots that can navigate and operate in the messy, changing spaces where humans actually work. By tackling gait-induced blur, memory bloat, and manipulation safety in a unified pipeline, it turns a 12% relocation success into 94% — the kind of jump that separates lab demos from commercial deployments. For buyers, the key metric is no longer just hardware specs, but how well the robot’s perception system survives the real world.











Partecipa alla discussione
Which humanoid OEM will integrate MIF-style navigation first?