
Peneliti MIT memanfaatkan model AI generatif yang dilatih secara khusus untuk menciptakan sistem yang dapat melengkapi bentuk objek 3D yang tersembunyi. Kredit: Courtesy of the researchers.
Robot yang beroperasi di gudang dan rumah pintar memiliki titik buta mendasar: apa pun yang terhalang dari kamera mereka tidak pernah ada bagi mereka. Kini, peneliti MIT menggunakan AI generatif untuk memperbaikinya, memanfaatkan sinyal nirkabel gelombang milimeter dan model AI yang dilatih khusus untuk merekonstruksi objek tersembunyi dan seluruh ruangan dengan akurasi hampir 20% lebih tinggi dibanding metode sebelumnya — tanpa satu pun kamera.
- Mengapa Visi Robot Berbasis Kamera Memiliki Kelemahan Struktural
- Bagaimana Wave-Former Merekonstruksi Objek Tersembunyi Melalui Dinding
- RISE: Memetakan Seluruh Ruangan dari Satu Radar
- Masalah Data Pelatihan — dan Bagaimana MIT Mengatasinya
- Arti Penting bagi Robotika Gudang dan Industri
- Pertanyaan yang Sering Diajukan
Mengapa Visi Robot Berbasis Kamera Memiliki Kelemahan Struktural
Persepsi robot yang bergantung pada kamera gagal begitu suatu objek keluar dari garis pandang — di balik kemasan, di bawah puing, atau di sudut. Ini bukan kasus ekstrem; ini adalah realitas operasional sehari-hari di gudang, pusat logistik, dan lingkungan rumah tempat robot perlu menemukan, mengidentifikasi, dan menggenggam objek yang tidak bisa mereka lihat secara langsung.
Solusi yang ada — kamera jamak, cahaya terstruktur, LiDAR — semuanya memiliki kendala yang sama: mereka memerlukan jalur optik yang jelas. Begitu karton, drywall, plastik, atau bahkan kain tebal masuk ke dalam persamaan, robot menjadi buta secara efektif. Keterbatasan ini menyebabkan kesalahan mahal dalam operasi pemenuhan pesanan, termasuk item terpack yang salah identifikasi dan gagal menggenggam yang menghentikan lini produksi.
Kelompok MIT Signal Kinetics, dipimpin oleh Associate Professor Fadel Adib, telah menghabiskan lebih dari satu dekade membangun alternatif menggunakan sinyal radar gelombang milimeter (mmWave) — pita frekuensi yang sama dengan Wi-Fi modern — yang menembus hambatan umum dan memantul dari objek tersembunyi. Tantangannya, hingga sekarang, adalah bahwa pantulan tersebut terlalu tidak lengkap untuk berguna bagi manipulasi presisi.
Bagaimana Wave-Former Merekonstruksi Objek Tersembunyi Melalui Dinding
Wave-Former, sistem baru MIT, menggabungkan radar mmWave dengan model AI generatif untuk merekonstruksi bentuk 3D penuh objek yang tersembunyi di balik hambatan — mencapai peningkatan akurasi hampir 20% dibanding metode terbaik sebelumnya pada sekitar 70 objek sehari-hari termasuk kaleng, kotak, peralatan dapur, dan buah-buahan.
Masalah fisika inti adalah specularity: sinyal mmWave memantul dari permukaan dalam satu arah, seperti cahaya dari cermin. Sensor radar hanya menangkap pantulan yang diarahkan kembali ke sensor, sehingga permukaan atas objek tersembunyi terlihat sebagian, sementara sisi dan bagian bawahnya tidak terlihat secara efektif. Sistem sebelumnya mencoba menafsirkan titik-titik awan yang tidak lengkap ini menggunakan aturan berbasis fisika saja — pendekatan yang pada dasarnya terbatas.
Pipeline Wave-Former bekerja dalam tiga tahap. Pertama, ia membangun rekonstruksi parsial objek tersembunyi dari pantulan mmWave mentah. Kedua, ia memasukkan bentuk parsial tersebut ke model AI generatif yang dilatih untuk memprediksi penyelesaian yang masuk akal. Ketiga, ia secara iteratif menyempurnakan permukaan hingga mencapai rekonstruksi 3D penuh. Hasilnya: robot tidak hanya dapat mendeteksi objek tersembunyi, tetapi juga memahami geometrinya cukup baik untuk merencanakan genggaman yang andal.
Menurut liputan Robohub tentang penelitian ini, sistem ini divalidasi pada objek yang disembunyikan di balik atau di bawah karton, kayu, drywall, plastik, dan kain — bahan-bahan yang persis ada di lingkungan gudang dan logistik nyata.
RISE: Memetakan Seluruh Ruangan dari Satu Radar
Sistem kedua MIT, RISE (Radar-based Indoor Scene Understanding), merekonstruksi tata letak ruangan secara lengkap — termasuk penempatan furnitur — menggunakan pantulan dari satu radar mmWave stasioner. Ia mencapai presisi spasial kira-kira dua kali lipat dari teknik yang ada dan tidak memerlukan platform sensor bergerak.
Kebanyakan pendekatan terkini untuk rekonstruksi ruang nirkabel memerlukan radar yang dipasang pada robot bergerak untuk menyapu lingkungan — kendala operasional yang signifikan. RISE mengambil pendekatan berbeda: ia mengeksploitasi pantulan multipath yang dihasilkan oleh manusia yang bergerak secara alami di dalam ruangan.
Ketika seseorang bergerak, sinyal mmWave memantul dari mereka, lalu memantul lagi dari dinding dan furnitur sebelum kembali ke radar. Gema sekunder ini — biasanya dibuang sebagai noise dengan label "sinyal hantu" — sebenarnya menyandikan informasi spasial tentang tata letak ruangan. Saat orang bergerak, sinyal hantu tersebut bergeser, dan posisinya yang berubah mengungkap geometri permukaan di sekitarnya.
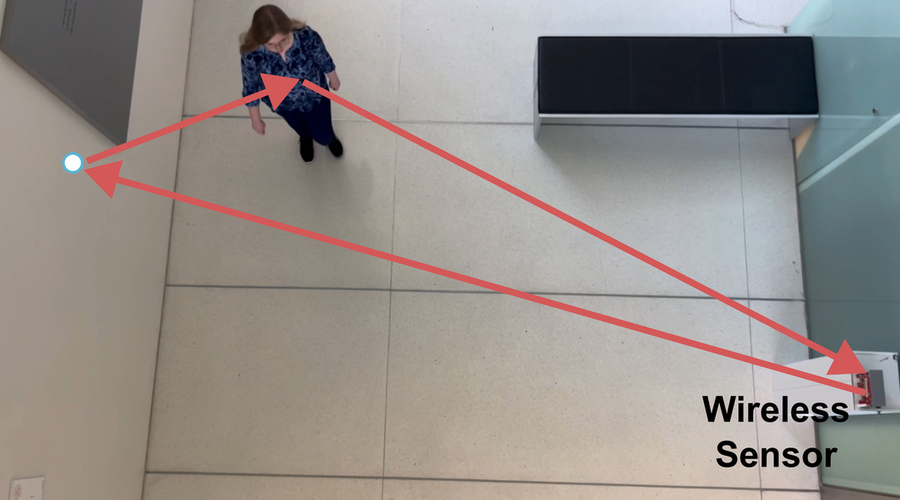 Tim juga membangun sistem yang diperluas yang sepenuhnya merekonstruksi seluruh pemandangan dalam ruangan dengan memanfaatkan pantulan sinyal nirkabel dari manusia yang bergerak di dalam ruangan. Kredit: Courtesy of the researchers.
Tim juga membangun sistem yang diperluas yang sepenuhnya merekonstruksi seluruh pemandangan dalam ruangan dengan memanfaatkan pantulan sinyal nirkabel dari manusia yang bergerak di dalam ruangan. Kredit: Courtesy of the researchers.
RISE divalidasi pada lebih dari 100 lintasan manusia yang ditangkap oleh satu radar stasioner. Implikasi privasi juga patut dicatat: tidak seperti sistem kamera, radar mmWave tidak menangkap citra visual individu, sehingga dapat digunakan di lingkungan di mana kamera menghadapi hambatan regulasi atau persetujuan.
Masalah Data Pelatihan — dan Bagaimana MIT Mengatasinya
Kendala mendasar bagi model AI di bidang ini adalah kelangkaan data: tidak ada dataset mmWave yang cukup besar untuk melatih model generatif dari awal. Solusi MIT adalah mensimulasikan fisika mmWave di atas dataset visi komputer skala besar yang sudah ada — pada dasarnya mengajari AI bahasa radar tanpa memerlukan data pelatihan khusus radar.
Melatih model generatif besar seperti GPT atau Claude membutuhkan dataset dengan jutaan atau miliaran contoh. Dataset penelitian mmWave jauh lebih kecil. Mengumpulkan data radar dunia nyata yang cukup akan, seperti yang dijelaskan oleh asisten riset MIT Maisy Lam, "memakan waktu bertahun-tahun."
Solusi tim adalah adaptasi sintetis: mereka mengambil dataset visi komputer besar yang sudah ada dan secara komputasional menerapkan sifat fisik pantulan mmWave — specularity, karakteristik noise, geometri sinyal — ke data gambar. Ini menciptakan set pelatihan sintetis namun akurat secara fisik yang dapat dipelajari oleh model generatif.
Pendekatan ini mewakili pola yang lebih luas yang muncul dalam penelitian AI Fisik: menggunakan simulasi berbasis fisika untuk mem-bootstrap pelatihan AI ketika data dunia nyata langka atau mahal untuk dikumpulkan. Prinsip yang sama mendasari sebagian besar kemajuan dalam pembelajaran manipulasi robot, di mana transfer sim-to-real telah menjadi paradigma dominan.
| Sistem | Tugas | Sumber Sinyal | Peningkatan Akurasi | Konfigurasi Sensor |
|---|---|---|---|---|
| Wave-Former | Rekonstruksi 3D objek tersembunyi | Pantulan mmWave dari objek | ~20% dibanding SOTA | Radar bergerak atau tetap |
| RISE | Rekonstruksi pemandangan ruangan penuh | Pantulan mmWave dari manusia bergerak | ~2× presisi dibanding SOTA | Satu radar stasioner |
Arti Penting bagi Robotika Gudang dan Industri
Bagi pembeli dan insinyur robotika, kedua sistem ini mengatasi masalah operasional yang berbeda namun sama-sama mendesak: memverifikasi barang yang dikemas dalam wadah tertutup, dan memungkinkan robot memahami lingkungan dinamis tanpa cakupan sensor penuh.
Verifikasi Fulfillment dan Kemasan
Robot gudang saat ini tidak dapat memastikan apa yang ada di dalam kotak tertutup tanpa membukanya. Kemampuan Wave-Former untuk merekonstruksi geometri objek 3D melalui karton dan plastik secara langsung menangani verifikasi pra-pengiriman — titik sakit yang signifikan untuk fulfillment e-commerce, di mana tingkat pengembalian akibat pesanan salah packing menghasilkan biaya besar. Robot yang dilengkapi persepsi mmWave dapat memverifikasi keberadaan dan geometri kasar barang sebelum kotak disegel, tanpa memperlambat jalur.
Penerapan Cerdas untuk Cobot dan AMR
Kemampuan pemetaan ruangan radar tunggal RISE memiliki implikasi langsung untuk robot bergerak otonom (AMR) dan cobot yang digunakan di ruang bersama manusia. Pendekatan pelacakan manusia saat ini memerlukan cakupan kamera yang rapat (dengan masalah privasi terkait) atau sensor yang dipasang pada robot bergerak itu sendiri. Radar tetap yang membangun model spasial langsung ruangan — termasuk lokasi manusia — dari analisis sinyal hantu dapat memungkinkan operasi cobot yang lebih aman dan responsif di lingkungan dinamis.
Bagi tim yang mengevaluasi robot untuk aplikasi ini, ada baiknya menjelajahi robot industri bekas dan cobot yang saat ini tersedia di Botmarket sambil memantau bagaimana sistem persepsi seperti Wave-Former berkembang menuju integrasi komersial.
Timeline Menuju Penerapan
Kedua sistem masih dalam tahap riset, dengan hasil akan dipresentasikan di IEEE Conference on Computer Vision and Pattern Recognition. Riset ini didukung oleh NSF, MIT Media Lab, dan Amazon — yang terakhir merupakan sinyal signifikan minat komersial. Tujuan tim selanjutnya adalah membangun model dasar untuk sinyal nirkabel, analog dengan GPT atau Gemini untuk bahasa, yang akan menjadi langkah perubahan dalam generalisabilitas pendekatan ini di berbagai lingkungan dan jenis objek.
Pertanyaan yang Sering Diajukan
Apa itu Wave-Former dan bagaimana cara kerjanya?
Wave-Former adalah sistem yang dikembangkan MIT yang menggunakan sinyal radar gelombang milimeter (mmWave) untuk merekonstruksi bentuk 3D objek yang tersembunyi di balik hambatan seperti karton, drywall, dan plastik. Ia membangun rekonstruksi parsial dari pantulan radar, kemudian menggunakan model AI generatif untuk melengkapi geometri yang hilang. Dalam pengujian pada sekitar 70 objek sehari-hari, ia mencapai akurasi hampir 20% lebih baik dibanding metode terbaik sebelumnya.
Bagaimana RISE merekonstruksi ruangan tanpa kamera?
RISE menggunakan satu radar mmWave stasioner dan mengeksploitasi "sinyal hantu" — pantulan sekunder yang memantul dari manusia yang bergerak di dalam ruangan dan kemudian dari furnitur dan dinding di sekitarnya. Dengan melacak bagaimana pantulan multipath ini berubah saat orang bergerak, model AI generatif menyimpulkan tata letak spasial seluruh ruangan. RISE menunjukkan presisi spasial kira-kira dua kali lipat dari teknik rekonstruksi ruang nirkabel yang ada pada lebih dari 100 lintasan uji.
Hambatan apa yang bisa ditembus sinyal mmWave?
Sinyal gelombang milimeter — rentang frekuensi yang sama dengan Wi-Fi — menembus material non-logam umum termasuk karton, kayu, drywall, plastik, dan kain. Sinyal ini tidak menembus logam secara efektif. Hal ini membuatnya cocok untuk lingkungan gudang di mana barang dikemas dalam karton dan plastik, tetapi kurang dapat diterapkan di selungkup industri yang banyak logam.
Apakah teknologi ini menjaga privasi lebih baik daripada kamera?
Ya. Radar mmWave tidak menangkap citra visual orang di lingkungan — ia hanya mendeteksi pantulan sinyal. Kemampuan pemetaan ruangan RISE menggunakan gerakan manusia sebagai sumber sinyal tanpa merekam data visual yang dapat diidentifikasi, yang memberikan keunggulan berarti dibanding pemetaan spasial berbasis kamera di tempat yang sensitif privasi seperti rumah sakit, rumah, atau tempat kerja yang diatur.
Kapan teknologi ini akan tersedia di robot komersial?
Wave-Former dan RISE saat ini masih dalam tahap riset, dengan makalah akan dipresentasikan di CVPR. Amazon adalah salah satu mitra pendanaan, menunjukkan minat komersial yang aktif. Tim MIT telah mengindikasikan bahwa membangun model dasar sinyal nirkabel adalah prioritas pengembangan berikutnya. Integrasi komersial dalam sistem gudang atau cobot kemungkinan masih beberapa tahun lagi, tetapi lintasan menuju perangkat keras yang dapat diterapkan sudah jelas.
Penelitian ini merupakan salah satu kemajuan paling praktis dalam persepsi robot selama setahun terakhir — bukan peningkatan tolok ukur marginal, tetapi pergeseran arsitektural sejati dalam cara robot memodelkan dunia di sekitar mereka. AI generatif tidak lagi sekadar alat bahasa atau gambar; ia menjadi mesin inferensi yang memungkinkan sistem fisik untuk bernalar tentang apa yang tidak dapat mereka amati secara langsung.









Bergabung dalam diskusi
Would single-radar room awareness change how you deploy cobots or AMRs in your facility?