Justin (también conocido como "Rollin' Justin" y "Agile Justin") es un robot humanoide diestro de dos brazos desarrollado por el Centro Aeroespacial Alemán (DLR).
💰Precio
$400,000
📅Primera fabricación
2008
🌍Origen
DE
📏Altura
190 cm
⚖️Peso
150 kg
🦾Grados de libertad
41
🏃Velocidad máxima
3.6 km/h
📦Carga útil
15 kg
🔋Batería
Not applicable
🛒Disponibilidad
Disponible
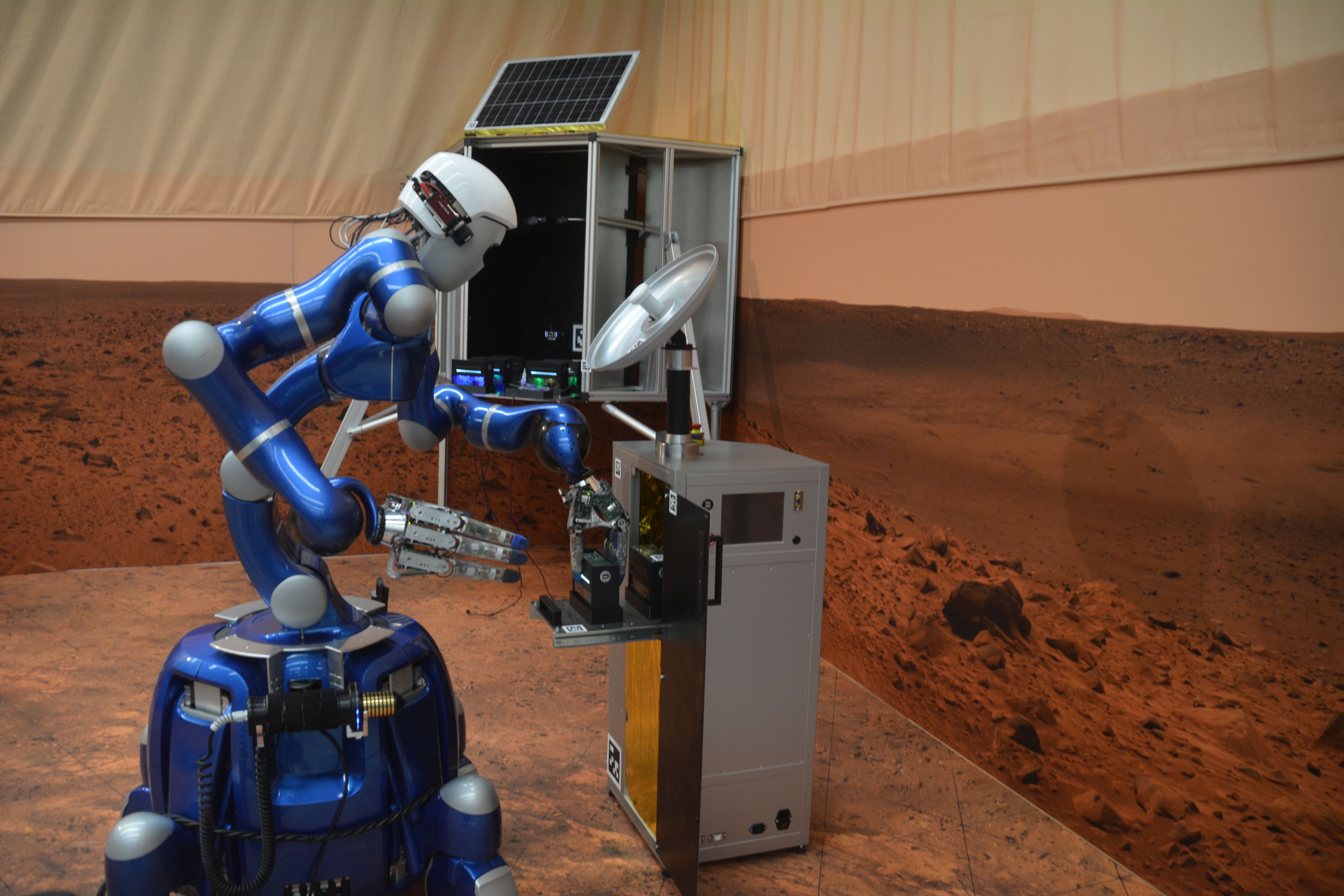
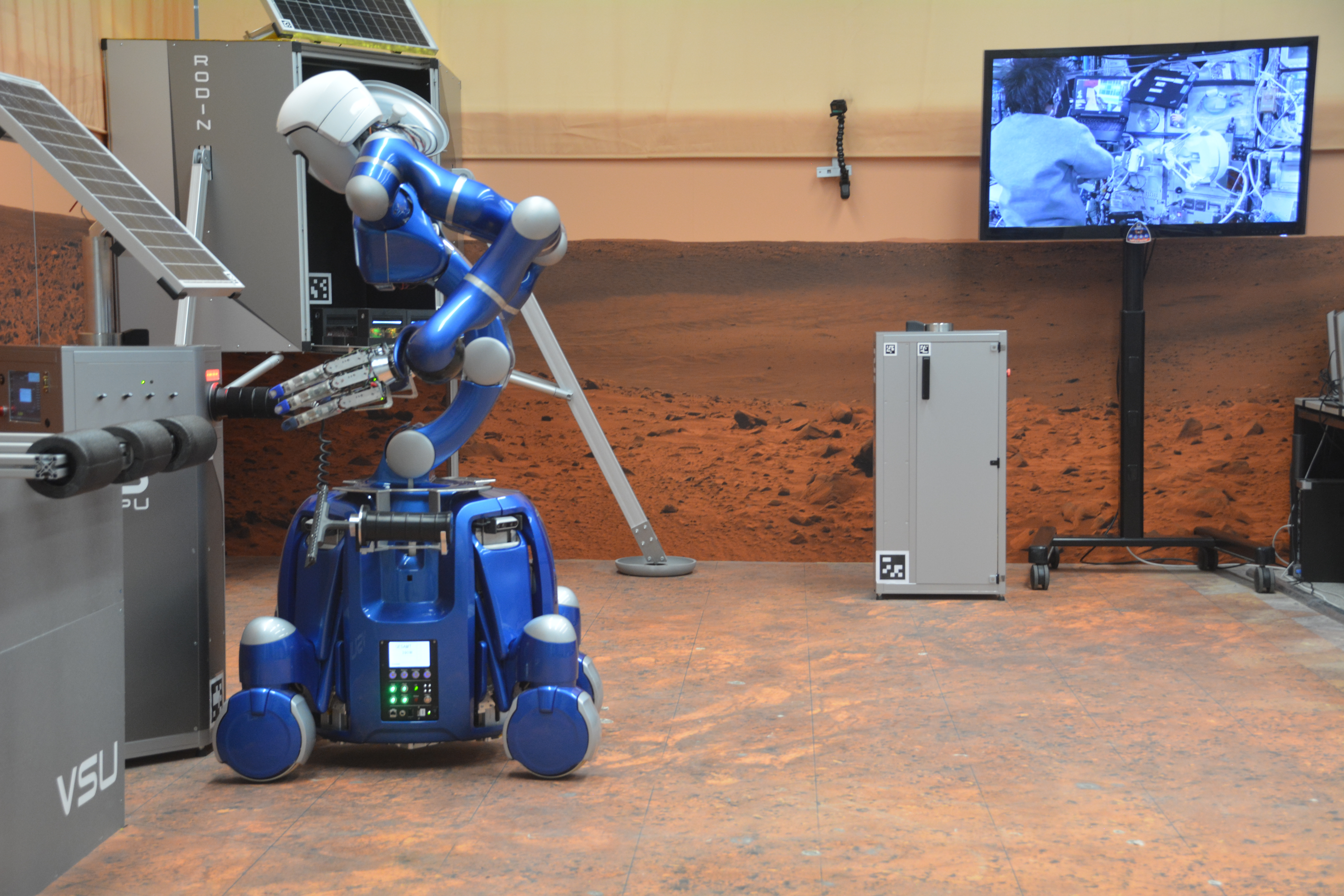
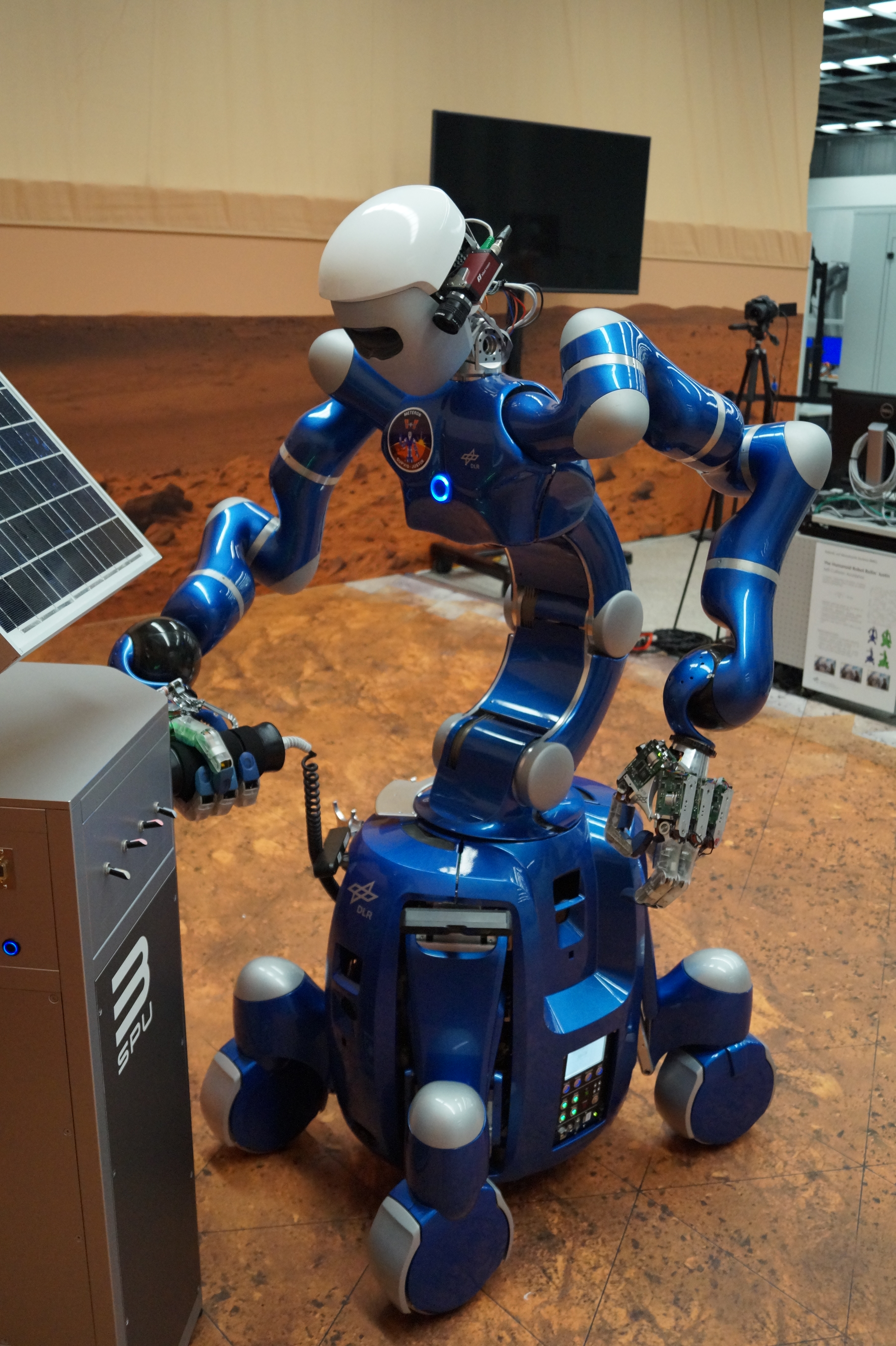
Justin (también conocido como "Rollin' Justin" y "Agile Justin") es un robot humanoide diestro de dos brazos desarrollado por el Centro Aeroespacial Alemán (DLR), específicamente su Centro de Robótica y Mecatrónica. Justin no es un caminante bípedo: es un torso humanoide altamente capaz (cabeza, dos brazos y manos sofisticadas) montado sobre una base móvil con ruedas extensible. Justin está diseñado para la investigación avanzada en manipulación diestra y es notablemente hábil — por ejemplo, puede atrapar pelotas lanzadas observando y prediciendo su trayectoria en fracciones de segundo.
Disponibilidad
Justin es un robot de investigación, desarrollado y utilizado internamente por el DLR. No es un producto comercial — no tiene precio ni ruta de compra. El DLR utiliza a Justin para empujar los límites de la manipulación diestra, la coordinación bimanual y la telerrobótica, incluyendo la investigación en telerrobótica espacial (el DLR ha explorado que astronautas en la Estación Espacial Internacional controlen de forma remota robots como Justin en la Tierra).
Especificaciones Completas
Aspecto
Detalle
Desarrollador
Centro Aeroespacial Alemán (DLR), Centro de Robótica y Mecatrónica
Tipo
Cuerpo superior humanoide diestro de dos brazos sobre base móvil con ruedas extensible ("Rollin' Justin")
Manos
Manos diestras altamente capaces — más avanzadas que las del DLR TORO, diseñadas para interactuar con una amplia gama de objetos
Habilidad notable
Atrapar pelotas lanzadas observando y prediciendo su trayectoria en tiempo real
Enfoque de investigación
Manipulación diestra y bimanual; telerrobótica, incluida la telerrobótica espacial
Base tecnológica
Construido sobre la experiencia en robótica ligera y controlada por torque del DLR (la misma herencia que los brazos KUKA-DLR Lightweight Robot)
Importancia
Justin es uno de los humanoides de investigación más diestros jamás construidos — una muestra del trabajo líder mundial del DLR en robótica ligera, controlada por torque y sensible a la fuerza. Su coordinación bimanual y manos avanzadas lo convierten en una plataforma de referencia para la investigación en manipulación, y su uso en experimentos de telerrobótica (incluyendo control desde la ISS hacia la Tierra) se conecta directamente con la misión espacial del DLR. Justin demuestra lo que es posible cuando la destreza, no la locomoción, es la prioridad de diseño.
Justin vs Robots Relacionados
Justin vs DLR TORO: Misma institución — TORO es el humanoide bípedo del DLR; Justin es el humanoide de manipulación diestra sobre base con ruedas, con manos más capaces.
Justin vs Astribot S1: Ambos priorizan la manipulación diestra sobre la locomoción bípeda.
Justin vs NASA Robonaut 2: Ambos son humanoides superiores diestros construidos para manipulación experta, incluso en contextos relacionados con el espacio.
DLR Justin is not sold commercially and has no official price. It is a bespoke research platform built in-house by the German Aerospace Center. Any attempt to purchase would require a direct collaboration agreement with DLR.
Justin excels at dexterous bimanual manipulation, including catching thrown objects, precise assembly tasks, and teleoperation with haptic feedback. Its 41 torque-controlled joints and four-fingered hands allow it to handle fragile objects gently or apply precise forces, but it cannot walk—only roll on its omnidirectional base.
No. DLR Justin is strictly a research platform and has never been offered for sale. Researchers outside DLR can sometimes access the technology through joint projects or by replicating parts of its design using published papers, but there is no commercial production.
The PR2 is also a research platform but it is a mobile base with two arms and no humanoid shape; it costs about $400,000 (originally). Justin is taller, has a humanoid upper body, more advanced hands with tactile sensing, and torque control in every joint. However, PR2 has a strong open-source software ecosystem and was sold to universities, making it easier to acquire and modify.
Justin stands 190 cm tall, weighs 150 kg, and has 41 degrees of freedom: 7 per arm, 12 per hand (four-fingered), and a 3-DOF movable torso. It moves at up to 3.6 km/h on its wheeled base, lifts approximately 15 kg per arm, and is powered via an external tether.
The DLR Justin was developed by the Institute of Robotics and Mechatronics at the German Aerospace Center (DLR) in Oberpfaffenhofen, Germany. DLR is a government-funded research organization known for space, aeronautics, and robotics research.
Justin does not have a battery. It relies on an external power supply via a tether, so runtime is unlimited as long as it is connected. This was an intentional design choice to focus on manipulation research without weight or endurance constraints.
Justin is used exclusively in academic and government research settings, particularly for advanced manipulation studies, space robotics programmes, and human-robot interaction labs. It has not been deployed in any commercial industry due to its laboratory nature.
No, Justin does not have legs. It is a wheeled humanoid that stands on an omnidirectional base, capable of moving sideways and turning. Its mobility is limited to smooth, flat indoor floors.
Justin is equipped with stereo cameras, laser scanners, torque sensors in every joint, six-axis force/torque sensors at each wrist, and tactile sensors on the fingertips. These sensors provide rich feedback for force control and environmental perception.