DLR TORO — Especificaciones e historia — Specs, Price & Where to Buy (2026)
TORO (TOrque-controlled humanoid RObot) es un robot humanoide bípedo controlado por par del Centro Aeroespacial Alemán (DLR), diseñado para investigar la marcha bípeda y la locomoción combinada con manipulación.
💰Precio
$200,000 – $400,000
📅Primera fabricación
2009
🌍Origen
DE
📏Altura
174 cm
⚖️Peso
55 kg
🦾Grados de libertad
39
🏃Velocidad máxima
0.7 km/h
📦Carga útil
5 kg
🔋Batería
Tethered
🛒Disponibilidad
No disponible
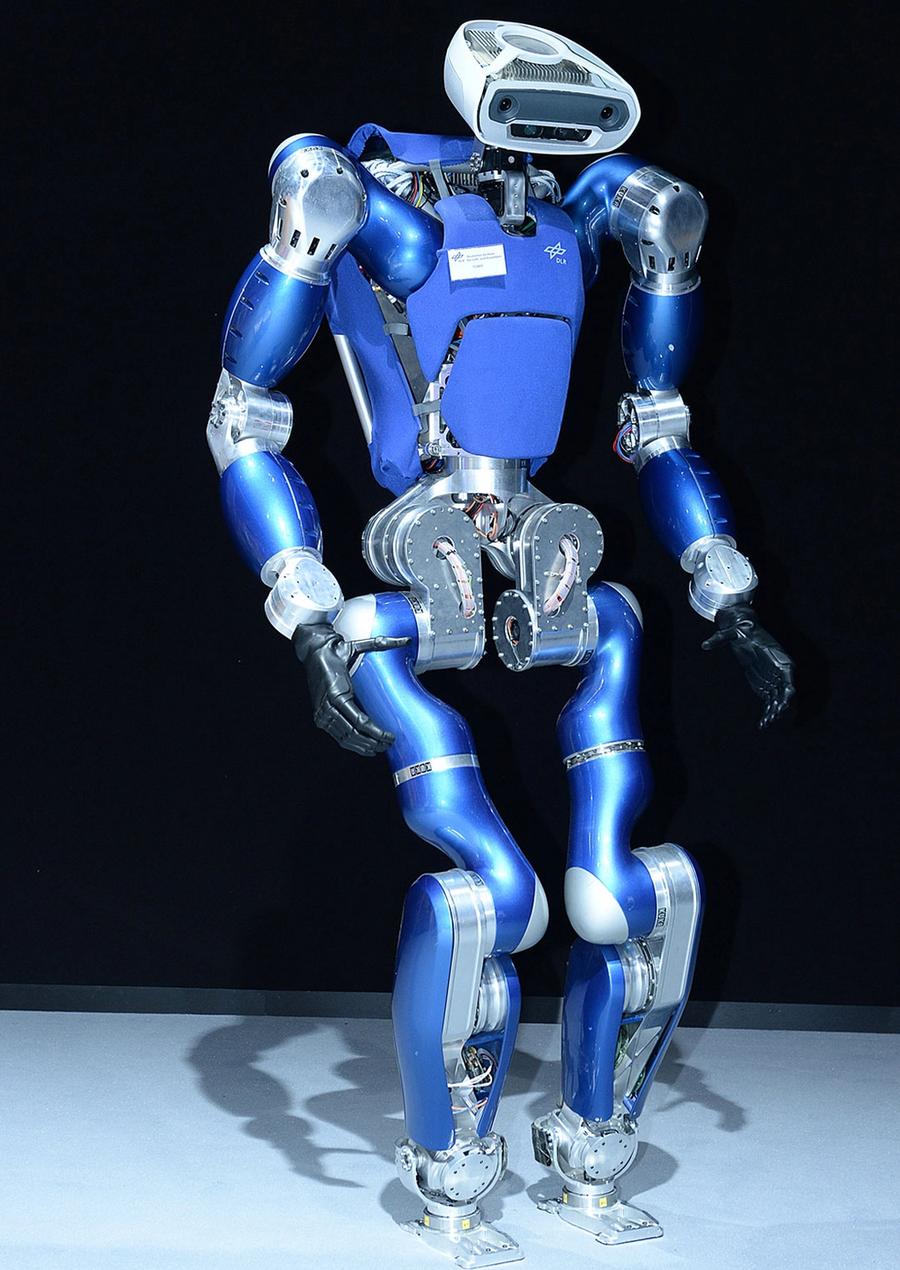
TORO (TOrque-controlled humanoid RObot) es un robot humanoide bípedo desarrollado por el Centro Aeroespacial Alemán (DLR). TORO surgió del "DLR-Biped" — un par de piernas robóticas que caminaron por primera vez en 2009 — al que posteriormente se le añadió un nuevo torso y se renombró como TORO. Como bípedo controlado por par, TORO es una plataforma de investigación para estudiar la marcha bípeda y la combinación de locomoción con manipulación ("loco-manipulación"). Su nombre también significa "toro" en español.
Disponibilidad
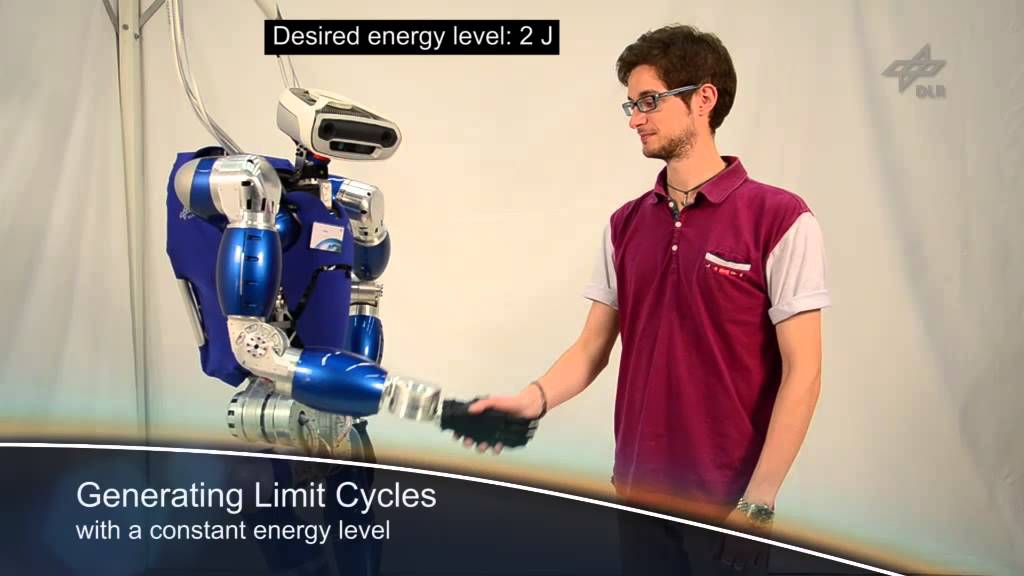
TORO es un robot de investigación, desarrollado y utilizado internamente por DLR — no es un producto comercial. No tiene precio ni vía de compra. DLR utiliza TORO para estudiar el comportamiento bípedo controlado por par de cuerpo completo: robots que ejecutan secuencias de movimientos "con previsión y fluidez".
Especificaciones completas
Especificación
Valor
Desarrollador
Centro Aeroespacial Alemán (DLR), Centro de Robótica y Mecatrónica
Origen
Evolucionado del DLR-Biped (piernas caminaron por primera vez en 2009); se añadió torso para crear TORO
Tipo
Humanoide bípedo controlado por par
Motores
25
Accionamiento
Controlado por par; admite modos de control de posición y par; accionamientos de brazo basados en el KUKA-DLR Lightweight Robot (LWR)
Carga útil
~10 kg
Sensores
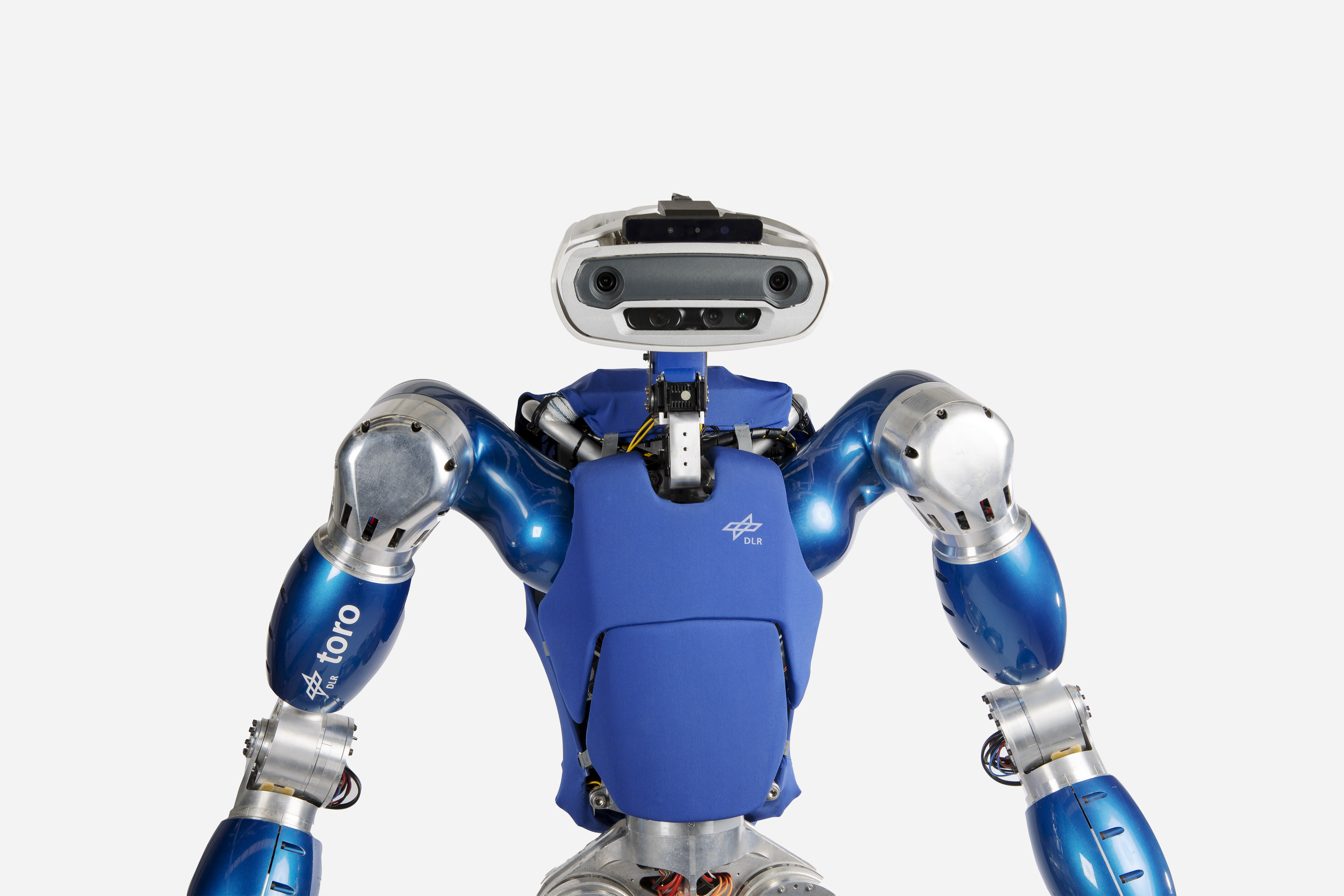
Sensores de posición y par en cada articulación; sensor de fuerza/par de 6 GDL en cada tobillo; IMU en torso y cabeza; cámara de profundidad, cámaras estéreo y un Intel RealSense en la cabeza
Autosuficiencia
Autónomo
Importancia
TORO representa la aplicación de la reconocida experiencia en robótica sensible a la fuerza y controlada por par del DLR al problema del humanoide bípedo. El control de par en todo el cuerpo permite que TORO camine y se equilibre de manera flexible y combine la marcha con la manipulación — un enfoque de investigación cada vez más central en todo el campo humanoide. Construido sobre las probadas piernas del DLR-Biped y la tecnología de brazos robóticos ligeros del DLR, TORO es una respetada plataforma de investigación europea para el control humanoide de cuerpo completo.
TORO frente a robots relacionados
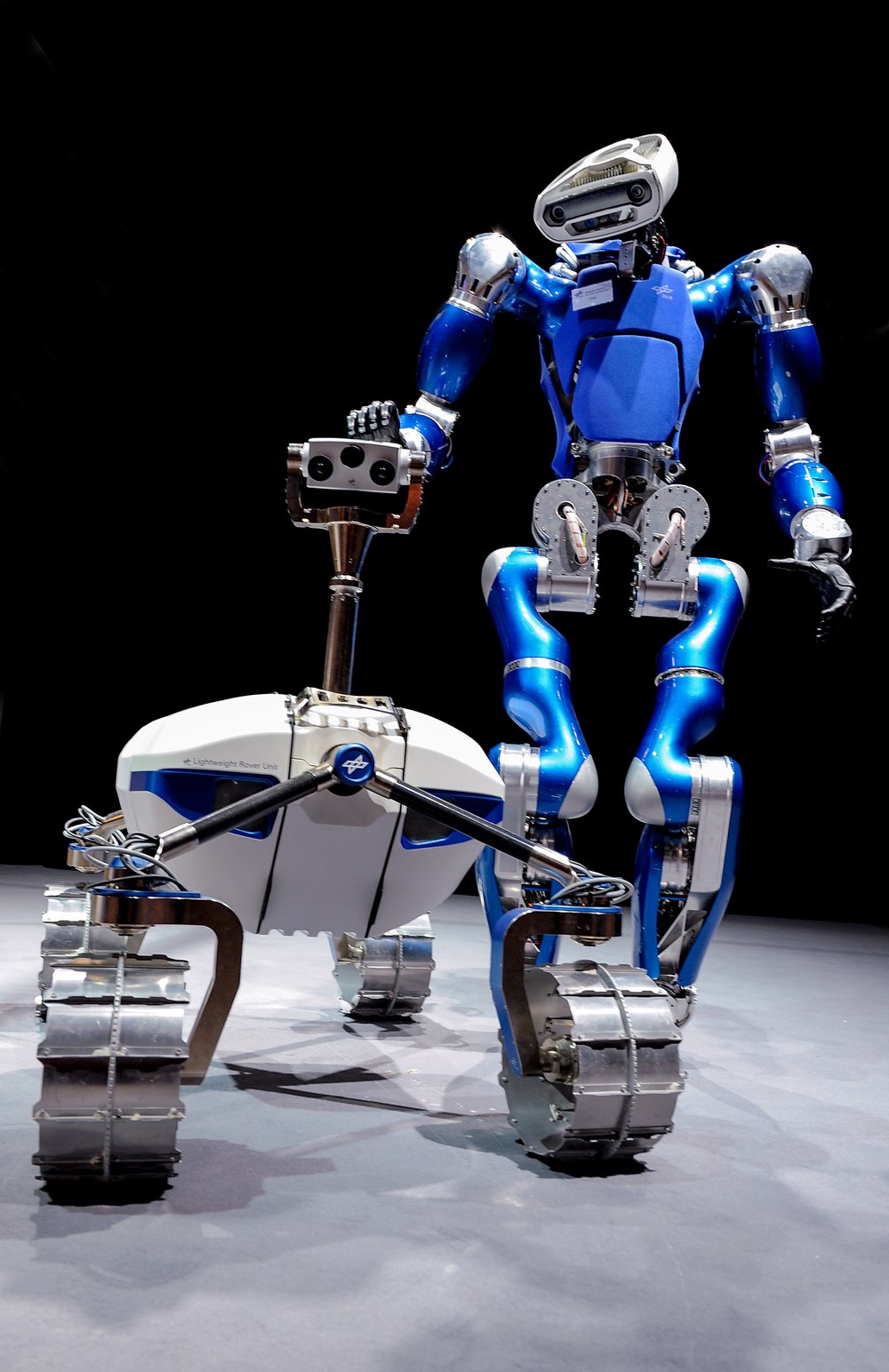
TORO vs DLR Justin: Misma institución — TORO es el caminante bípedo; Justin es el humanoide de manipulación diestra sobre ruedas.
TORO vs PAL TALOS: Ambos son humanoides de investigación europeos controlados por par; TALOS se vende a instituciones, TORO es interno del DLR.
TORO vs Agility Cassie: Ambas son plataformas de investigación de locomoción bípeda conscientes de par/fuerza; TORO es un humanoide completo, Cassie solo piernas.
TORO has no commercial price because it is a research platform built for internal DLR use only. DLR may collaborate with external institutes but does not sell units. If you were to replicate the hardware, component costs (custom torque-controlled joints, sensors, compute) would likely exceed $200,000.
TORO is a 39-DOF bipedal robot capable of compliant walking, balancing against pushes, and performing simple manipulation while standing or stepping. It uses torque control for smooth, safe motions, but its walking speed is limited to about 0.72 km/h and it relies on an external power tether.
No, TORO is not commercially available. It is a research-only platform operated by the German Aerospace Center (DLR). There is no product page, order form, or public price. Interested labs should contact DLR directly about research collaborations.
Both are non-commercial humanoids, but Atlas uses hydraulic actuation for explosive agility and outdoor capability, while TORO relies on electric series-elastic joints for precise, compliant torque control at every axis. TORO is better suited for lab-based torque-control research, Atlas for high-dynamics real-world demonstrations.
Height: 1.74 m, weight: 55 kg, 39 degrees of freedom (12 legs, 12 arms, 2 torso, 1 head), arm payload: ~5 kg, max walking speed ~0.72 km/h, tethered 48 V power (no onboard battery), running Linux with Xenomai real-time framework.
The German Aerospace Center (DLR), specifically the Institute of Robotics and Mechatronics in Oberpfaffenhofen, Germany, developed and operates TORO. DLR has a long history in lightweight torque-controlled arms and bipeds dating back to the early 2000s.
TORO has no battery; it runs on a tethered external 48 V DC supply. Battery life is therefore limited only by the power grid. There is no onboard energy storage, making it unsuitable for untethered operation.
TORO is used exclusively in academic and government research settings, primarily in humanoid robotics labs studying bipedal walking, whole-body control, and compliant manipulation. It has no deployments in commercial industries.
While DLR has demonstrated TORO stepping on uneven surfaces in lab mock-ups, its tether, sensor suite (stereo camera, RGB-D, rotating laser scanner), and modest push-recovery robustness are not designed for unconstrained outdoor navigation. It remains a controlled indoor research platform.
TORO is equipped with an IMU, joint torque and position sensors, 6-axis force/torque sensors at each foot, a stereo camera, an RGB-D sensor (e.g., ASUS Xtion), and a rotating laser scanner (e.g., Hokuyo UTM-30LX) for environment perception.