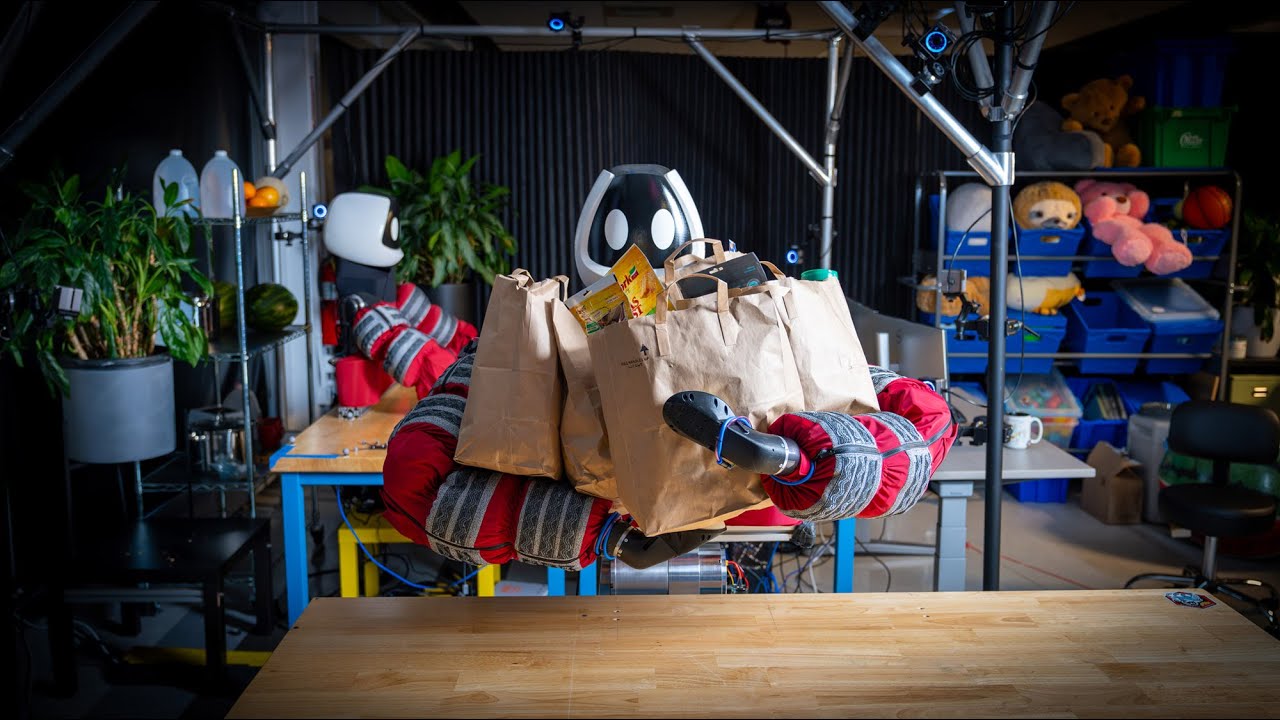
Punyo es una plataforma de investigación robótica humanoide de cuerpo blando del Toyota Research Institute (TRI), presentada a principios de 2024. Su nombre proviene de la palabra japonesa "punyo" (ぷにょ), que describe algo suave, lindo y resistente. Punyo está diseñado para explorar la manipulación con todo el cuerpo — la idea de que los robots, como las personas, deben cargar objetos voluminosos usando el pecho, los brazos y las caderas juntos, no solo las manos y las yemas de los dedos. Es un humanoide de torso hacia arriba (sin piernas) y representa la visión de TRI para futuros robots domésticos seguros y capaces.
Disponibilidad
Punyo es una plataforma de investigación, no un producto — no tiene precio ni canal de compra. TRI lo presenta explícitamente como un robot para la investigación de manipulación con todo el cuerpo, complementando el trabajo separado de TRI sobre destreza fina de las yemas de los dedos. TRI declaró los objetivos de diseño para el concepto más amplio: suave, interactivo, asequible, seguro, duradero y capaz.
Especificaciones completas
| Especificación | Valor |
|---|---|
| Presentación | Principios de 2024 (Toyota Research Institute) |
| Tipo | Plataforma de investigación humanoide de torso blando (sin piernas) |
| Estructura subyacente | Dos brazos robóticos "duros", un marco de torso rígido y un actuador de cintura |
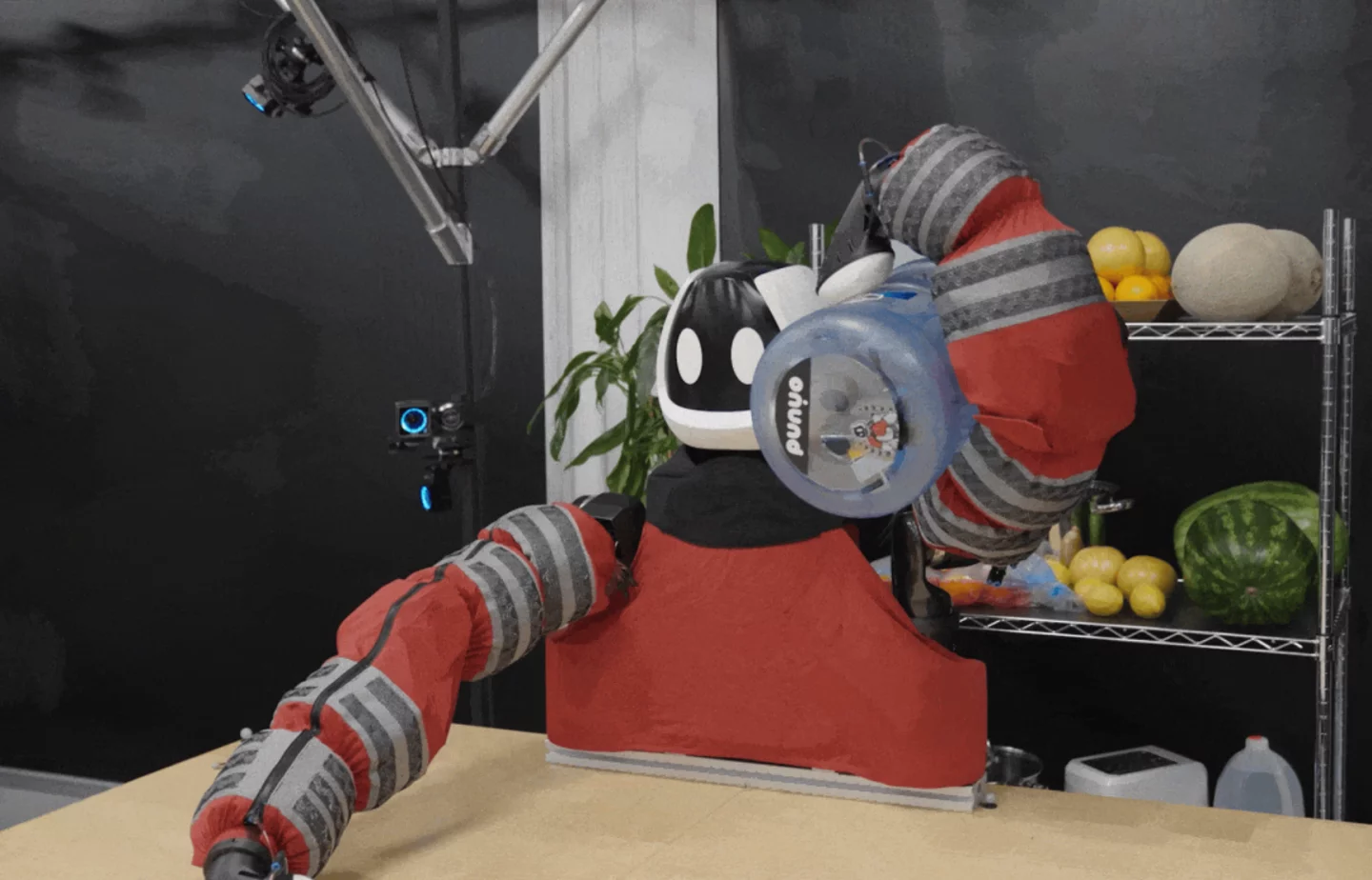
| Cubierta blanda | Vejigas llenas de aire ("burbujas") cubren los brazos; cada una añade ~5 cm de flexibilidad y se puede presurizar individualmente para elegir la rigidez |
| Detección de fuerza | Las burbujas se conectan a través de tubos a sensores de presión que detectan fuerzas en la superficie exterior |
| Efectores finales | "Patas" — burbujas de látex individuales de alta fricción con una cámara interna; se observa un patrón de puntos impresos para detectar deformaciones y estimar fuerzas |
| Cobertura | Manos, brazos y pecho cubiertos con materiales flexibles y sensores táctiles |
| Propósito | Manipulación con todo el cuerpo de objetos grandes y voluminosos (por ejemplo, levantar una jarra de agua, cerrar un cajón) |
Importancia
Punyo encarna una filosofía de diseño distintiva: combinar la precisión, fuerza y fiabilidad de los robots "duros" tradicionales con la flexibilidad, resistencia al impacto y detección simple de los sistemas robóticos blandos. Al usar todo su cuerpo — pecho, brazos, fricción y flexibilidad — Punyo puede sostener y manipular objetos grandes con menos energía que un robot solo de manos, lo que TRI argumenta podría permitir robots domésticos más ligeros, de menor costo y más seguros. Es una declaración de investigación sobre lo que Toyota cree que deberían ser los robots domésticos: seguros y agradables de trabajar junto a ellos.
Punyo vs robots relacionados
- Punyo vs Toyota T-HR3: Ambos son esfuerzos de investigación humanoide de Toyota; T-HR3 explora la teleoperación y articulaciones flexibles, Punyo explora la manipulación blanda con todo el cuerpo.
- Punyo vs 1X NEO Gamma: Ambos buscan diseños suaves y seguros para el hogar — NEO Gamma como producto de consumo en envío, Punyo como plataforma de investigación.
- Punyo vs Clone Robotics Clone Alpha: Ambos rediseñan el hardware robótico alejándose de los enlaces rígidos — Punyo mediante burbujas neumáticas blandas, Clone Alpha mediante músculos artificiales hidráulicos de agua.
Fuente: Toyota Research Institute