
Un nuevo sistema de percepción llamado Campo Interactivo Multimodal (MIF) aumenta el éxito de reubicación de robots humanoides en entornos dinámicos del 12% al 94%, mientras reduce la huella de memoria en un 91.4%. Desarrollado y probado en un Unitree G1, MIF aborda el desafío central: mantener la memoria espacial del robot fiable cuando su propia marcha sacude las cámaras, los objetos se mueven y la geometría debe ser segura para la manipulación.
- ¿Qué es el Campo Interactivo Multimodal (MIF)?
- ¿Cómo maneja MIF la distorsión perceptual inducida por la marcha?
- ¿Por qué importa el éxito de reubicación para el despliegue humanoide?
- ¿Qué significa la reducción de huella de memoria para el uso real?
- Lo que esto significa para los compradores de humanoides
¿Qué es el Campo Interactivo Multimodal (MIF)?
MIF es un pipeline de percepción-adaptación en bucle cerrado construido específicamente para robots humanoides que deben navegar y manipular en entornos reales y cambiantes. Acopla tres "campos" distintos: un Campo de Apariencia que utiliza Gaussian Splatting 3D consciente de incertidumbre para suprimir el desenfoque inducido por la marcha, un Campo Espacial que mantiene memoria topológica a lo largo del tiempo, y un Campo Geométrico que verifica la Seguridad de la Pose de Interacción (IPS) antes de que el robot intente una manipulación. El sistema utiliza una puntuación de detección de discrepancia para distinguir falsos positivos inducidos por la locomoción de cambios ambientales reales, actualizando solo regiones localmente inconsistentes en lugar de reconstruir todo el mapa.
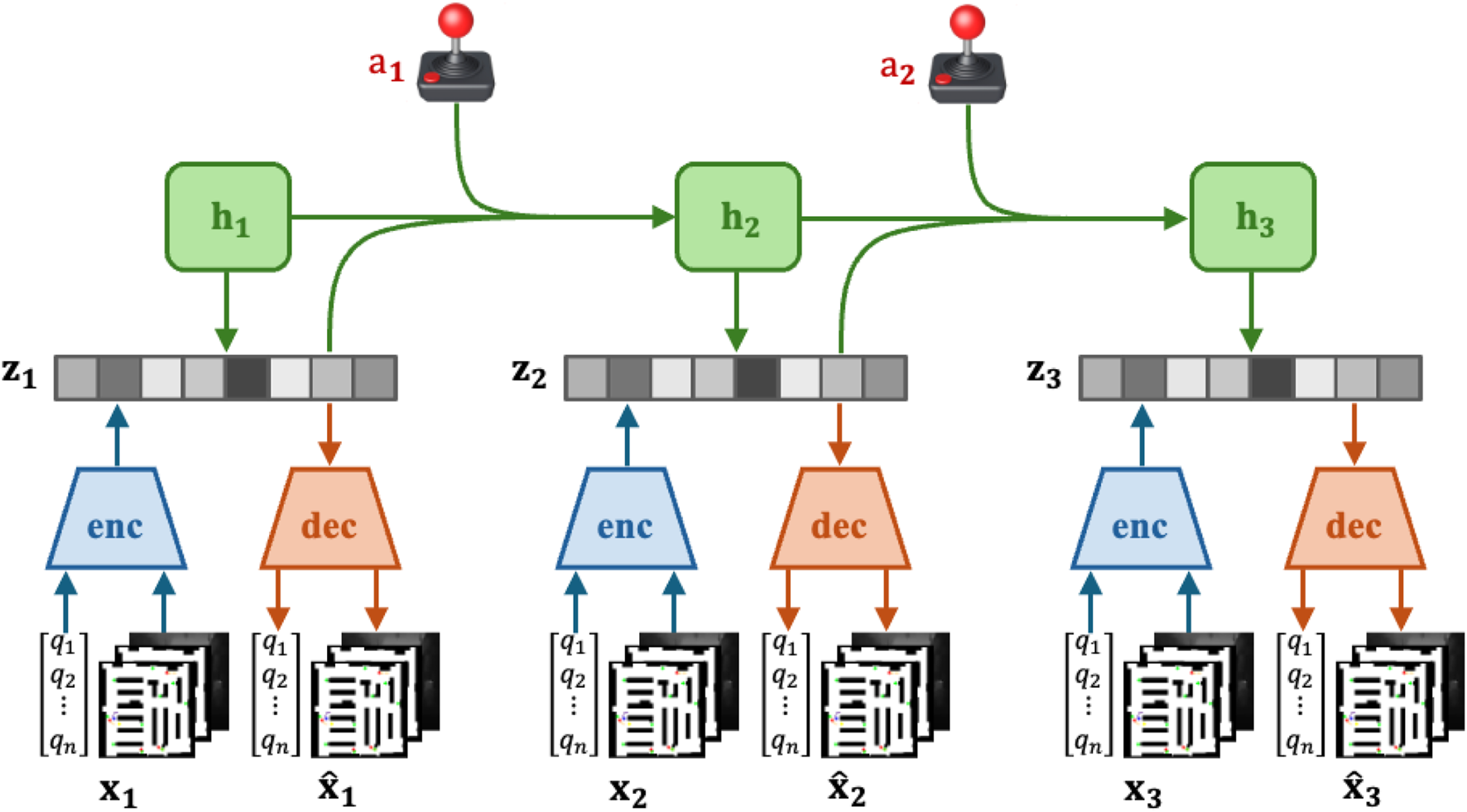
La innovación radica en tratar el propio movimiento del robot no como ruido a filtrar, sino como una señal que puede medirse y compensarse. El mapeo semántico tradicional asume trayectorias de cámara estables, un lujo que los humanoides rara vez tienen. El Gaussian Splatting consciente de confianza de MIF predice dónde ocurrirá el desenfoque y pondera esos píxeles hacia abajo, preservando la memoria de la escena incluso durante un paso reactivo.
¿Cómo maneja MIF la distorsión perceptual inducida por la marcha?
Los humanoides que caminan sacuden sus cámaras con cada pisada, creando un desenfoque de movimiento con el que los sistemas convencionales de SLAM visual y mapeo semántico luchan. El Campo de Apariencia de MIF modela explícitamente esto rastreando la incertidumbre de cada gaussiano 3D: las regiones que se mueven erráticamente debido a la marcha tienen menor confianza y se ponderan a la baja en el mapa. La puntuación de detección de discrepancia luego compara los fotogramas entrantes con el Campo de Apariencia almacenado, marcando solo los cambios que persisten más allá del período de marcha esperado.
En los experimentos con el Unitree G1, este enfoque permitió al robot mantener una memoria semántica consistente incluso mientras caminaba sobre pisos de oficina irregulares, pasando sobre cables y girando bruscamente. El sistema logró un 94% de éxito de reubicación en entornos no estáticos frente al 12% usando memoria de grafo de escena estática, una mejora de 7.8× que se traduce directamente en menos fallos cuando el robot debe volver a una ubicación previamente mapeada.
¿Por qué importa el éxito de reubicación para el despliegue humanoide?
La reubicación — la capacidad de reidentificar y volver a una posición u objeto después de moverse — es la columna vertebral de cualquier aplicación humanoide práctica. Sin ella, un robot no puede completar tareas de múltiples pasos como "trae la herramienta del banco, llévala al puesto de trabajo y devuélvela al almacenamiento". Cada fallo fuerza una intervención humana, matando el rendimiento y la confianza.
Para los compradores comerciales, esta es la diferencia entre un robot que puede manejar un turno en un almacén y uno que se pierde después de que se mueve el primer palé. El salto del 12% al 94% mueve esta capacidad de "curiosidad de investigación" a "base operativa". Cuando se combina con el Campo Geométrico de MIF para la reconstrucción impulsada por tareas, el robot no solo sabe dónde está, sino que también puede evaluar si una pose de agarre es segura, evitando colisiones con inventario frágil o accesorios ajustados.
¿Qué significa la reducción de huella de memoria para el uso real?
MIF reduce la huella de memoria semántica en un 91.4% mediante destilación de características. En términos prácticos, un mapa que anteriormente requería 1 GB ahora cabe en aproximadamente 86 MB. Esto importa porque plataformas humanoides como el Unitree G1 llevan cómputo limitado a bordo — típicamente un Intel NUC o similar — y necesitan cada megabyte para planificación y control.
| Métrica | Grafo de Escena Estática | MIF (Nuestro) | Mejora |
|---|---|---|---|
| Éxito de reubicación (entorno dinámico) | 12% | 94% | +82 pp |
| Huella de memoria semántica | ~100% (línea base) | 8.6% de la línea base | Reducción del 91.4% |
| Mecanismo de actualización | Reasignación completa requerida | Incremental local | Capacidad en tiempo real |
| Verificación de seguridad de manipulación | Ninguna | Seguridad de Pose de Interacción | Integrada |
La pequeña huella de memoria también abre la puerta al intercambio de mapas a nivel de flota. Los robots pueden transmitir solo las partes cambiadas de una escena, reduciendo el ancho de banda y permitiendo el mapeo colaborativo entre múltiples humanoides que trabajan en el mismo espacio.
Lo que esto significa para los compradores de humanoides
Si está evaluando robots humanoides para entornos dinámicos — almacenes, líneas de ensamblaje, laboratorios, centros de salud — MIF aborda el mayor riesgo operativo: perderse. El Unitree G1 utilizado en el estudio ya es uno de los humanoides más asequibles del mercado, y un sistema de navegación que funciona de manera confiable en el desorden del mundo real mejora directamente el retorno de la inversión.
Conclusiones clave para adquisiciones:
- Exija robustez demostrada: Cualquier vendedor que afirme autonomía humanoide debería, como mínimo, mostrar tasas de éxito de reubicación superiores al 90% en escenas con personas y muebles en movimiento. Por debajo del 50% no está listo.
- La eficiencia de memoria importa: Los sistemas que requieren GPUs de alta gama o conectividad en la nube para el mapeo no escalarán. La huella de menos de 100 MB de MIF se ejecuta en la computadora a bordo del G1; los compradores deberían pedir especificaciones comparables.
- La seguridad es parte de la navegación: La verificación de Seguridad de Pose de Interacción de MIF es un diferenciador. Sin ella, un humanoide que intente un agarre en un espacio desordenado corre el riesgo de derribar objetos o a sí mismo. Busque sistemas que integren la seguridad de manipulación en el pipeline de navegación.
Explore robots humanoides en Botmarket — incluyendo el Unitree G1 y plataformas que podrían integrar sistemas como MIF.
Preguntas Frecuentes
¿Cuál es el papel del Unitree G1 en esta investigación? El G1 sirvió como plataforma de prueba para experimentos del mundo real en una oficina dinámica. Es un humanoide de 29 GDL de aproximadamente 1.27 m de altura, con un costo inferior a $16,000 en su lanzamiento, lo que lo convierte en el bípedo más accesible para dicha investigación.
¿En qué se diferencia MIF del SLAM visual estándar? El SLAM estándar asume movimiento de cámara estable y escenas estáticas. MIF modela explícitamente la distorsión inducida por la marcha y utiliza una puntuación de discrepancia para distinguir el movimiento del robot de los cambios ambientales reales, logrando una reubicación 7.8× mejor en entornos no estáticos.
¿Puede MIF ejecutarse en otras plataformas humanoides? El sistema es independiente de la plataforma en principio, ya que depende de la entrada de la cámara y los estados de las articulaciones del motor. La adopción por otras plataformas como Figure 02 o Tesla Optimus requeriría integración, pero no una rearquitectura fundamental.
¿Cómo se logra la reducción de memoria del 91.4%? Mediante destilación de características: comprimiendo características gaussianas 3D de alta dimensión en descriptores compactos mientras se retiene información semántica. Solo se actualizan las regiones localmente cambiadas, evitando reconstrucciones completas del mapa.
¿Es la Seguridad de Pose de Interacción exclusiva de MIF? La mayoría de los sistemas de navegación ignoran la seguridad de manipulación hasta después de llegar a un destino. MIF incorpora verificaciones geométricas directamente en el pipeline de mapeo, permitiendo al robot abortar una reubicación si la pose objetivo es insegura para el agarre.
¿Cuándo estará disponible comercialmente este sistema? Los investigadores publicaron una página de proyecto y código, pero no se ha anunciado integración comercial. Los compradores industriales deberían estar atentos a licencias o asociaciones con OEM de humanoides en los próximos 6 a 12 meses.
¿Está ejecutando humanoides en entornos dinámicos? ¿La fiabilidad de navegación justifica la inversión?
Conclusión
MIF representa un paso significativo hacia robots humanoides que puedan navegar y operar en los espacios desordenados y cambiantes donde los humanos realmente trabajan. Al abordar el desenfoque inducido por la marcha, la hinchazón de memoria y la seguridad de manipulación en un pipeline unificado, convierte un 12% de éxito de reubicación en un 94%, el tipo de salto que separa las demostraciones de laboratorio de los despliegues comerciales. Para los compradores, la métrica clave ya no son solo las especificaciones de hardware, sino qué tan bien sobrevive el sistema de percepción del robot al mundo real.











Únete a la discusión
Which humanoid OEM will integrate MIF-style navigation first?