
La industria de la IA Física ha invertido miles de millones en actuadores más inteligentes, manos diestras y modelos fundacionales, descuidando en gran medida el lado humano del bucle. Wetour Robotics sostiene que el verdadero cuello de botella no es la capacidad del robot, sino la interfaz que permite a los humanos participar en tiempo real, especialmente cuando las manos, los ojos o la voz están ocupados con la tarea en cuestión.
- El cuello de botella de la interfaz en la IA Física
- El enfoque de Fusión de Intención Espacial de Wetour Robotics
- Cómo funciona Orchestra OS: arquitectura y componentes
- Las concesiones: dónde la tecnología aún se queda corta
- Lo que esto significa para la robótica y la automatización
- Preguntas frecuentes
El cuello de botella de la interfaz en la IA Física
Los últimos tres años han traído avances enormes en hardware robótico e IA incorporada — desde la manipulación ágil de Boston Dynamics hasta los modelos Gemini Robotics de Google DeepMind. Sin embargo, todos estos sistemas siguen dependiendo de las mismas tres modalidades de entrada que han dominado la interacción humano-máquina durante cuatro décadas: pantallas, botones y voz. Esas modalidades asumen que el usuario puede detenerse, mirar hacia abajo y traducir su intención en comandos estructurados — una suposición que se rompe en cuanto el trabajo se traslada a un entorno real. Un técnico de campo en una turbina eólica, con ambas manos ocupadas en una llave, no puede hacer una pausa para tocar una tableta. Un trabajador logístico en un muelle de carga, con los ojos fijos en un palé, no puede sacar un teléfono. En cualquier entorno donde las manos están ocupadas, los ojos están comprometidos o el habla es impracticable, la pila de interfaz convencional falla silenciosamente. Según un análisis técnico de Wetour Robotics (a través de IEEE Spectrum), este cuello de botella oculto se está volviendo tan relevante como cualquier limitación de hardware en el lado del robot — y resolverlo requiere tratar el cuerpo humano como un nodo de primera clase en la red informática.

El enfoque de Fusión de Intención Espacial de Wetour Robotics
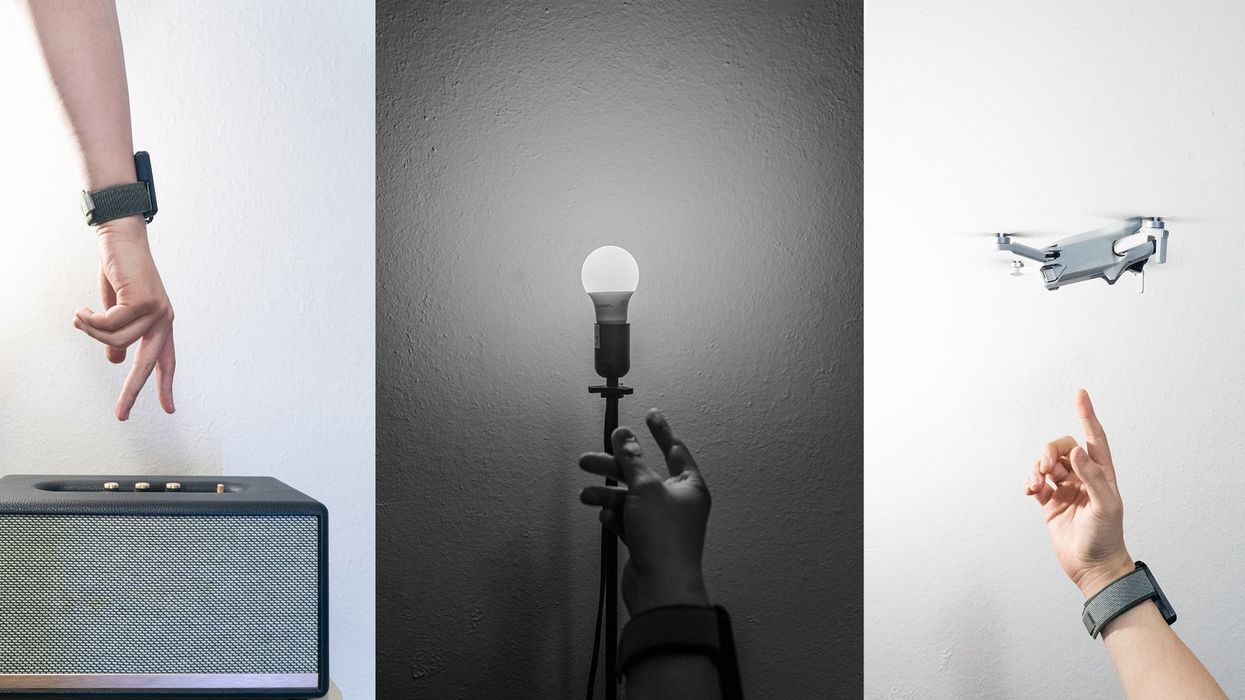
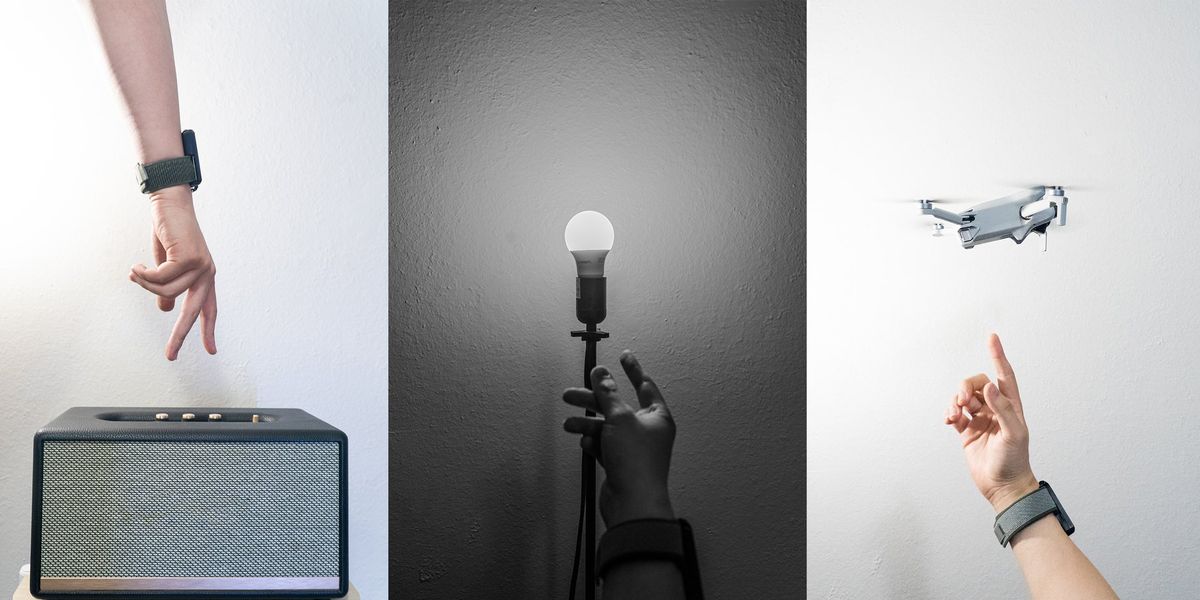
Wetour Robotics llama a su solución Fusión de Intención Espacial: el procesamiento simultáneo de tres flujos de información centrada en el humano — posición espacial, contexto visual e intención gestual — fusionados en un solo comando en tiempo real para cualquier dispositivo físico conectado. A diferencia de la voz o el tacto, este enfoque no requiere que el usuario se detenga o se desconecte de su tarea principal. En cambio, el sistema lee la intención desde donde el cuerpo ya está, hacia dónde miran los ojos y qué están preparando los músculos. La afirmación central es que una sola modalidad observada de forma aislada es ambigua — un brazo levantado podría significar "alto", "alcanzar" o "estirarse". Combinar ubicación, mirada y activación muscular en un único motor de inferencia resuelve esa ambigüedad a nivel del sistema operativo. El objetivo declarado de la empresa es hacer que la interfaz se sienta cerrada en lugar de mediada, con una latencia extremo a extremo por debajo de 100 milisegundos — el umbral en el que la interacción en tiempo real se siente natural en lugar de retardada.
Cómo funciona Orchestra OS: arquitectura y componentes
Orchestra no es un solo dispositivo, sino una plataforma en capas diseñada para ser flexible en cuanto a sensores e independiente de actuadores. La arquitectura se descompone en tres capas de percepción y cuatro motores de coordinación.
Capas de percepción:
| Capa | Función | Propiedad clave |
|---|---|---|
| VisionLink | Percepción visual/espacial desde cámaras | Identificación de objetos en tiempo real, estimación de distancias, contexto ambiental |
| Conductor | Tubería de bioseñales desde una banda de EMG superficial | Detecta potenciales de acción de unidades motoras 50–80 ms antes del movimiento visible |
| Orchestra OS | Núcleo de cómputo y orquestación (NVIDIA Jetson Orin Nano Super) | Inferencia en el borde, sin dependencia de la nube en la ruta crítica |
Los cuatro motores de coordinación — Percepción, Intención, Orquestación y Seguridad — se ejecutan en el Jetson Orin Nano Super, manteniendo todo el bucle de control en el borde. El Motor de Intención realiza la Fusión de Intención Espacial real, resolviendo entre modalidades lo que el usuario está tratando de hacer. El Motor de Seguridad arbitra comandos conflictivos y aplica envolventes operacionales, un requisito crítico para cualquier sistema que conecte la intención humana con maquinaria física.
La propiedad técnicamente distintiva de la electromiografía de superficie (sEMG) es que puede leer la intención antes de que el cuerpo actúe. Los potenciales de acción de las unidades motoras aparecen en la superficie de la piel aproximadamente 50 a 80 milisegundos antes de que un dedo complete el gesto correspondiente. Wetour Robotics llama a esto detección de intención pre-movimiento, y es lo que permite a Orchestra anticipar la intención del usuario en lugar de reaccionar a ella — una capacidad que ninguna interfaz de pantalla, botón o voz puede replicar.
Las concesiones: dónde la tecnología aún se queda corta
Ningún sistema que conecte el cuerpo humano con la maquinaria digital está terminado. Wetour Robotics reconoce tres desafíos abiertos y aborda cada uno con una concesión deliberada.
Estabilidad basal de la sEMG bajo movimiento. En un usuario estacionario, el reconocimiento continuo de gestos a partir de EMG superficial es fiable. Pero cuando el usuario camina, trepa o se mueve, los artefactos de movimiento y la deriva de los electrodos degradan la señal. La respuesta de la empresa es pragmática: Orchestra recurre a un conjunto más pequeño de gestos discretos robustos en entornos operativos complejos y reserva los modos de control continuo para contextos donde la relación señal-ruido lo permita.
Miniaturización de la computación de IA en el borde. Ejecutar el bucle completo de percepción a actuación en el borde — incluyendo modelos de visión, clasificación de EMG y traducción de protocolos — requiere inferencia real en el dispositivo. Wetour Robotics utiliza una placa portadora compacta con un diseño térmico y un módulo de batería dimensionados para ser usables todo el día, pero la computación en el borde en miniatura aún implica intercambios entre capacidad, duración de la batería y factor de forma.
Heterogeneidad de los protocolos de dispositivos de terceros. El lado del actuador es un paisaje fragmentado de diferentes fabricantes, interfaces de comando, pilas de comunicación y convenciones de seguridad. En lugar de estandarizar, Orchestra utiliza una capa de agente de IA para negociar la conexión y traducir protocolos de manera adaptativa, de modo que la misma intención humana pueda manejar un dron, un robot industrial usado o un dispositivo de movilidad.
Lo que esto significa para la robótica y la automatización
La implicación más amplia para la industria robótica es doble. Primero, las interfaces más inteligentes expanden los casos de uso viables para el hardware robótico existente. Un robot de almacén que ya funciona de forma autónoma en pasillos estructurados se vuelve mucho más útil cuando un supervisor de planta puede redirigirlo con una mirada y un gesto sutil de la mano — sin tableta, sin comando de voz, sin detener el flujo de trabajo. Para los compradores que evalúan despliegues de robots, la capacidad de la interfaz se está convirtiendo en un criterio de compra junto con la carga útil, el alcance y el tiempo de ciclo.
Segundo, tratar el cuerpo humano como un nodo de primera clase en el bucle informático produce el tipo de datos de interacción humano-máquina naturales y en entornos reales que el ecosistema más amplio de la IA Física necesita. Cada interacción natural entre un humano y el mundo físico es una señal potencial de entrenamiento para modelos fundacionales — y la mayoría de esas interacciones son actualmente invisibles para cualquier sistema informático. El enfoque de Wetour Robotics convierte efectivamente a cada operador en un generador de datos para la próxima generación de IA incorporada, incluidos los robots humanoides.
Para los compradores potenciales, la pregunta clave no es si su robot es lo suficientemente inteligente — es si sus operadores pueden comunicarse con él sin detener su trabajo. El costo de recapacitación, de interrupciones del flujo de trabajo y de fricción en la adopción a menudo excede el costo del robot mismo. Los sistemas con interfaz primero como Orchestra pueden ofrecer un mejor retorno sobre ese costo total de propiedad que simplemente actualizar la inteligencia a bordo del robot.
Preguntas frecuentes
¿Qué es la Fusión de Intención Espacial? Es el procesamiento simultáneo de la posición espacial, el contexto visual y la intención gestual — tres flujos de información centrada en el humano fusionados en un solo comando en tiempo real para cualquier dispositivo físico conectado. El enfoque resuelve la ambigüedad que ocurre cuando se observa una sola modalidad de forma aislada.
¿En qué se diferencia Orchestra OS de los sistemas de control gestual existentes? Los sistemas gestuales existentes típicamente dependen de un solo sensor (cámara o acelerómetro) y requieren un gesto deliberado y aislado. Orchestra fusiona tres flujos de datos a nivel del sistema operativo con una latencia inferior a 100 ms, y utiliza señales EMG pre-movimiento para anticipar la intención 50–80 ms antes de que el gesto se complete visiblemente.
¿Qué hardware requiere Orchestra en el borde? La plataforma de cómputo de referencia es el NVIDIA Jetson Orin Nano Super, un módulo de borde compacto que ejecuta el bucle completo de percepción a actuación — modelos de visión, clasificación de bioseñales, fusión de intención y traducción de protocolos — sin dependencia de la nube en la ruta crítica.
¿Puede Orchestra controlar cualquier robot o dispositivo? Orchestra es independiente del actuador. Utiliza una capa de agente de IA para negociar y traducir protocolos de manera adaptativa, de modo que la misma interfaz puede manejar robots industriales, drones, dispositivos de movilidad o equipos de hogar inteligente. Sin embargo, la heterogeneidad de los protocolos de terceros sigue siendo un desafío de ingeniería reconocido.
¿Cuáles son las limitaciones actuales de la banda de EMG superficial? El reconocimiento continuo de gestos se degrada cuando el usuario camina o trepa debido a artefactos de movimiento y deriva de electrodos. En entornos dinámicos, Orchestra recurre a un conjunto de gestos discretos robustos. El control continuo se reserva para contextos con suficiente relación señal-ruido.
¿Está disponible esta tecnología ahora? Wetour Robotics ha demostrado la plataforma en entornos controlados. La arquitectura está diseñada para ser flexible en cuanto a sensores y desplegable. No se ha anunciado una fecha de lanzamiento para el mercado masivo, pero los conceptos subyacentes están en desarrollo activo.
¿Estás evaluando un despliegue de robots? ¿La capacidad de la interfaz está ya en tu lista de verificación?
Conclusión
La IA Física ha avanzado dramáticamente en el lado del robot del bucle, pero el lado humano sigue restringido por interfaces diseñadas para trabajo de escritorio. El enfoque de Fusión de Intención Espacial de Wetour Robotics ofrece una alternativa convincente: tratar el cuerpo como interfaz, fusionar múltiples señales de intención en el borde con latencia inferior a 100 ms, y permitir que los operadores se mantengan concentrados en su tarea en lugar de en la herramienta. La próxima ola de productividad en automatización puede no venir de robots más inteligentes — sino de formas más inteligentes para que los humanos se comuniquen con los que ya tenemos.











Únete a la discusión
Would you trade a 20% faster robot for a 50% faster operator interface?